

산업용 로봇

산업 제조
다양한 유형의 산업용 로봇과 고유한 기능에 대해 알아보세요. 오늘날 로봇 팔, 이동 로봇, 공중 드론, 수중 로봇, 협동로봇과 같은 각 유형의 로봇 사용 및 응용 분야를 명확하게 이해하세요.
시장에는 다양한 유형의 로봇이 있습니다. 어떤 유형을 사용해야 하는지 어떻게 알 수 있나요? 많은 설계 및 엔지니어링 문제와 마찬가지로 "형태는 기능을 따릅니다." 즉, 어떤 종류의 로봇이 필요한지는 의도하는 기능에 따라 다릅니다. 로봇은 바닥이나 다른 표면에 고정됩니까, 아니면 이동해야 합니까? 로봇이 시간당 몇 단위를 처리할 수 있어야 합니까? 로봇이 들어야 하는 최대 무게는 얼마입니까? 로봇이 한곳에 고정되어 있다면 작업봉투의 크기는? 작업 봉투는 직사각형 또는 원형입니까? 이러한 질문에 답하면 선택의 폭을 빠르게 좁히고 목적에 맞는 이상적인 산업용 로봇 유형을 선택할 수 있습니다.
이 기사에서는 다양한 유형의 로봇, 장점과 단점, 그리고 로봇의 용도를 결정하는 방법을 살펴봅니다.
시장에는 7가지 주요 유형의 고정 로봇이 있습니다. 고정되어 있다는 것은 바닥, 천장 또는 기타 표면에 볼트로 고정된 로봇을 의미하며 이동하지 않습니다. 일반적으로 고정 로봇은 집기 및 배치, 분류, 조립, 용접 및 마무리와 같은 작업을 위해 설계된 로봇 팔입니다.
여기에서 우리는 다양한 유형의 로봇 팔과 그 특성 및 용도를 고려합니다.
<울>장점: 모든 로봇 암 유형 중 가장 유연한 움직임. 상당히 강력하고 무거운 물건을 들어 올릴 수 있습니다.
단점: 울타리를 쳐야 할 수도 있습니다. 다른 로봇 팔보다 느립니다. 다른 로봇 팔보다 비쌉니다. 보다 정교한 제어 시스템이 필요합니다.
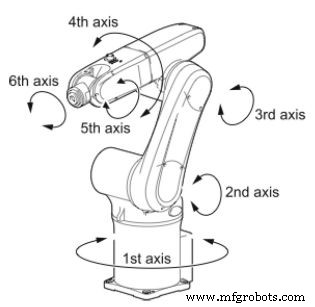
다관절 로봇팔의 움직임은 다른 유형의 로봇팔과 비교하여 인간의 팔과 가장 유사합니다. 일반적인 다관절 팔에는 6개의 축 또는 관절이 있습니다. 응용 프로그램 및 제조업체에 따라 더 적거나 더 많을 수 있습니다. 로봇의 관절이 많을수록 움직임이 더 부드럽고 덜 "로봇과 유사"해집니다. 이러한 움직임의 유연성은 자유도로 설명됩니다.
흥미로운 사실: 인공 손의 디자이너는 인간의 손이 27도의 자유도를 가진다고 생각합니다. 사람의 팔에는 7개의 자유도가 있으므로 사람의 팔과 손의 자유도를 합하면 34개입니다.
인간의 팔과 손이 움직일 수 있는 모든 미묘한 방법을 복제하는 것은 산업용 로봇에 너무 비싸고 복잡할 것입니다. 일반적으로 산업용 로봇 팔의 6자유도는 필요한 거의 모든 작업을 수행하기에 충분하다는 데 동의합니다.
로봇은 피아노를 칠 수 없지만 그럴 필요는 없습니다!
애플리케이션에 따라 로봇 팔에 손과 같은 로봇인 그리퍼가 장착될 수 있습니다. 일반적으로 로봇 그리퍼는 사람의 손보다 훨씬 간단합니다. 때로는 흡입 컵이나 전자석처럼 간단할 수도 있습니다. 또는 세 손가락의 부드러운 그리퍼를 사용하여 신선한 농산물이나 달걀과 같은 섬세한 물체를 집을 수 있습니다. 다양한 유형의 그리퍼가 있으며 모든 애플리케이션을 처리할 수 있는 단일 로봇 그리퍼는 아직 발견되지 않았습니다.
또는 EoAT(End of Arm Tooling)라고 하는 도구는 디버링, 연삭 또는 밀링을 위한 드릴 비트 또는 다른 종류의 비트를 고정하는 회전 도구와 같은 일종의 도구일 수 있습니다. 용접, 페인팅, 샌딩, 레이저 절단 등을 위한 특수 EoAT를 포함하여 많은 가능성이 있습니다.
다관절 로봇은 직선으로만 움직일 수 있는 선형 또는 병진 관절과 달리 모든 관절이 회전할 수 있어 매우 유연합니다.
다관절 로봇은 픽 앤 플레이스, 아크 용접, 스폿 용접, 포장, 머신 텐딩, 자재 취급과 같은 응용 분야에 사용됩니다. 접근하기 어려운 장소에서 호(또는 유사한 패턴)를 생성하는 능력은 다관절 로봇을 자동차 산업 및 이러한 능력이 필요한 기타 제조 분야에 적합한 후보로 만듭니다.
역사적으로 1톤 이상의 물체를 집을 수 있는 크고 강력한 다관절 로봇에는 주변 환경을 인식할 수 있는 센서가 장착되어 있지 않았습니다. 사람이 그러한 로봇을 방해하면 심각한 부상을 입거나 심지어 사망할 수도 있습니다.
결과적으로 이러한 로봇 팔은 자체 공간으로 분리되어야 합니다. 로봇의 기능을 완전히 이해하는 자격을 갖춘 직원만이 로봇이 작동하는 벽이나 울타리가 있는 공간에 들어갈 수 있습니다.
그러나 다관절 로봇 팔에 적절한 센서와 제어 소프트웨어가 장착되어 있다면 사람 주위에서 안전하게 작동할 수 있습니다. 예를 들어, 카메라나 LiDAR 센서가 있는 컴퓨터 비전을 사용하여 로봇이 이동 경로를 방해하는 것이 있거나 사람이나 물체가 접근하고 있지만 아직 방해가 되지 않는 것을 감지하면 로봇 속도를 줄이거나 멈출 수 있습니다. 다른 센서는 충돌을 감지할 수 있습니다. 팔이 무언가에 부딪치면 멈추거나 방향을 반대로 돌립니다. 일반적으로 사람들과 함께 작동하기에 안전한 다관절 암은 속도와 힘이 제한되도록 설계되었습니다.
장점: 간단한 제어 시스템. 모델에 따라 매우 무거운 물건을 들어 올릴 수 있습니다. 정확한. 세 축 모두에서 강성. 다관절 암보다 저렴합니다.
단점: 회전 운동을 할 수 없습니다.
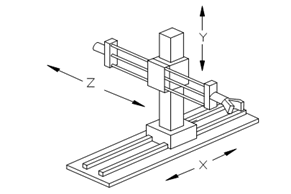
이 로봇은 세 축(앞뒤, 위아래, 좌우)을 따라 선형 이동을 위해 데카르트 좌표계(X, Y, Z)를 사용합니다. 세 개의 관절은 모두 병진운동을 하므로 관절의 움직임이 직선으로 제한됩니다. 이러한 로봇을 "선형" 로봇이라고도 하는 이유입니다.
데카르트 로봇은 픽 앤 플레이스, 자재 취급, 포장 자동화, 보관 및 검색, 절단 및 드릴링, 그리고 더 많은 응용 분야에 사용할 수 있습니다.
3차원 모두에서 견고하기 때문에 매우 정확하고 반복 가능합니다. 관절형 로봇 팔보다 간단하고 소프트웨어 제어가 더 간편하며 애플리케이션에 따라 더 저렴할 수 있습니다.
장점: 모델에 따라 매우 무거운 물건을 들어 올릴 수 있습니다. 원하는 경우 시설의 전체 길이에 걸쳐 매우 크게 만들 수 있습니다. 적합한 애플리케이션에 대해 매우 비용 효율적일 수 있습니다.
단점: 회전 운동을 할 수 없습니다.

직교 또는 선형 로봇을 갠트리 로봇으로 구성할 수 있습니다. 갠트리 로봇은 오버 헤드 트랙을 따라 이동합니다. 설계에 따라 갠트리 로봇은 매우 무거운 하중을 처리하고 빠르고 정확하게 이동할 수 있습니다. 또한 필요한 경우 시설의 전체 바닥 공간을 덮도록 매우 크게 만들 수도 있습니다. 더 작은 갠트리 로봇은 픽 앤 플레이스(pick-and-place) 및 높은 정확도와 우수한 강성을 포함하는 기타 작업에 유용할 수 있습니다.
선형 로봇의 모션 제어 측면은 상대적으로 단순하기 때문에 다른 유형의 로봇보다 비용이 낮고 많은 자동화 작업에 매우 비용 효율적인 솔루션이 될 수 있습니다.
데카르트 로봇의 작업 영역은 직사각형입니다. 수직 이동을 추가하면 작업 봉투가 상자 모양이 됩니다.
장점: 많은 조립 응용 분야에 탁월합니다. 빠르고 정확합니다. 조립 작업에 비용 효율적입니다.
단점: 관절 팔만큼 유연하지 않습니다. 데카르트 팔만큼 정확하지 않습니다. Delta 로봇 팔만큼 빠르지 않습니다.
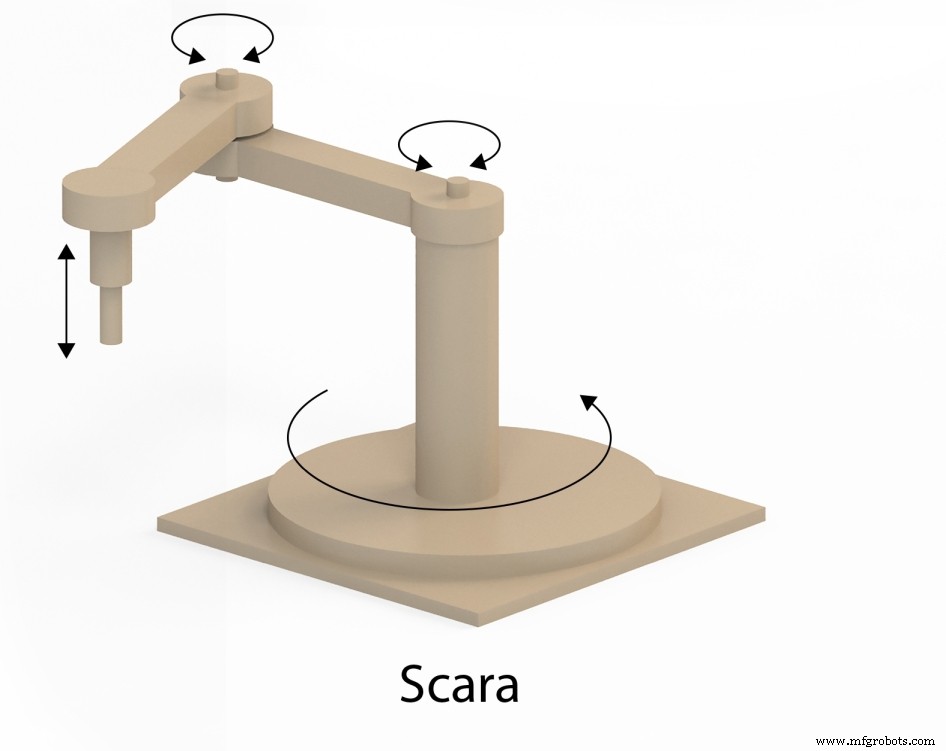
SCARA 로봇(Selective Compliance Assembly Robot Arm)은 3개의 관절 또는 축으로 움직인다는 점에서 직교 로봇과 유사합니다. 그러나 데카르트 로봇과 달리 SCARA 로봇의 두 관절은 회전합니다. 따라서 그들은 데카르트 로봇보다 더 복잡한 움직임이 가능합니다. 일반적으로 더 빠르고 유연하게 움직일 수 있지만 데카르트 로봇보다 정확도가 떨어집니다.
흥미로운 사실: SCARA 로봇의 광범위한 사용은 소규모 전자 산업에 혁명을 일으켰습니다. 작은 설치 공간, 단순성 및 디자인 특성으로 인해 이 애플리케이션 분야에 매우 적합하며 매우 비용 효율적인 것으로 입증되었습니다.
이름의 "어셈블리"에서 알 수 있듯이 SCARA 로봇 암은 어셈블리 애플리케이션을 위해 개발되었습니다. 스카라 로봇은 1981년 일본 야마나시 대학의 마키노 히로시가 만들었다. 이름의 "준수"는 일정량의 "기브"를 나타냅니다. 즉, SCARA 로봇을 수평면에서 밀면 약간만 줄 것입니다. 움직일 것이며 완전히 고정된 것은 아닙니다. 그러나 수직면에서 SCARA 로봇은 매우 단단하며 이 방향으로 밀면 "주지" 않습니다. 따라서 "선택적" 준수가 있습니다. 수직면이 아닌 수평면에 적합합니다.
선택적 준수는 예를 들어 부품을 회로 기판에 삽입해야 하는 조립 작업에서 매우 유용합니다. 이러한 종류의 조립에는 부품이 구멍에 맞아야 하는 경우가 많습니다. 부품을 구멍에 중앙에 맞추려면 중심점을 찾기 위해 약간의 "준수"가 필요한 경우가 많습니다. 그러면 아래쪽으로 이동하는 삽입력이 단단하고 단단해야 합니다.
SCARA 로봇은 데카르트 로봇보다 덜 단단하고 들 수 있는 무게도 제한되어 있습니다. SCARA 로봇은 설치 공간이 작고 일반적으로 이동 거리가 비교적 작은 애플리케이션에 사용됩니다. 관절형 팔보다 자유도가 낮습니다. 반면에 정확도가 높고 반복 가능합니다. 그리고 관절형 암보다 저렴합니다.
SCARA 로봇의 작업 영역은 원통형이며 응용 프로그램을 고려할 때도 고려해야 합니다. SCARA 로봇은 일반적으로 다관절 암보다 빠르지만 Delta 로봇만큼 빠르지는 않습니다.
장점: 다관절 암보다 간단한 제어 시스템. 도달 범위가 길 수 있습니다. 많은 용접 응용 분야에 매우 좋습니다. 다관절 암보다 빠를 수 있습니다.
단점: 다관절 로봇 팔만큼 유연하지 않습니다. 더 오래된 기술. 종종 다소 큰 공간이 필요합니다. 델타 암만큼 빠르지 않습니다.
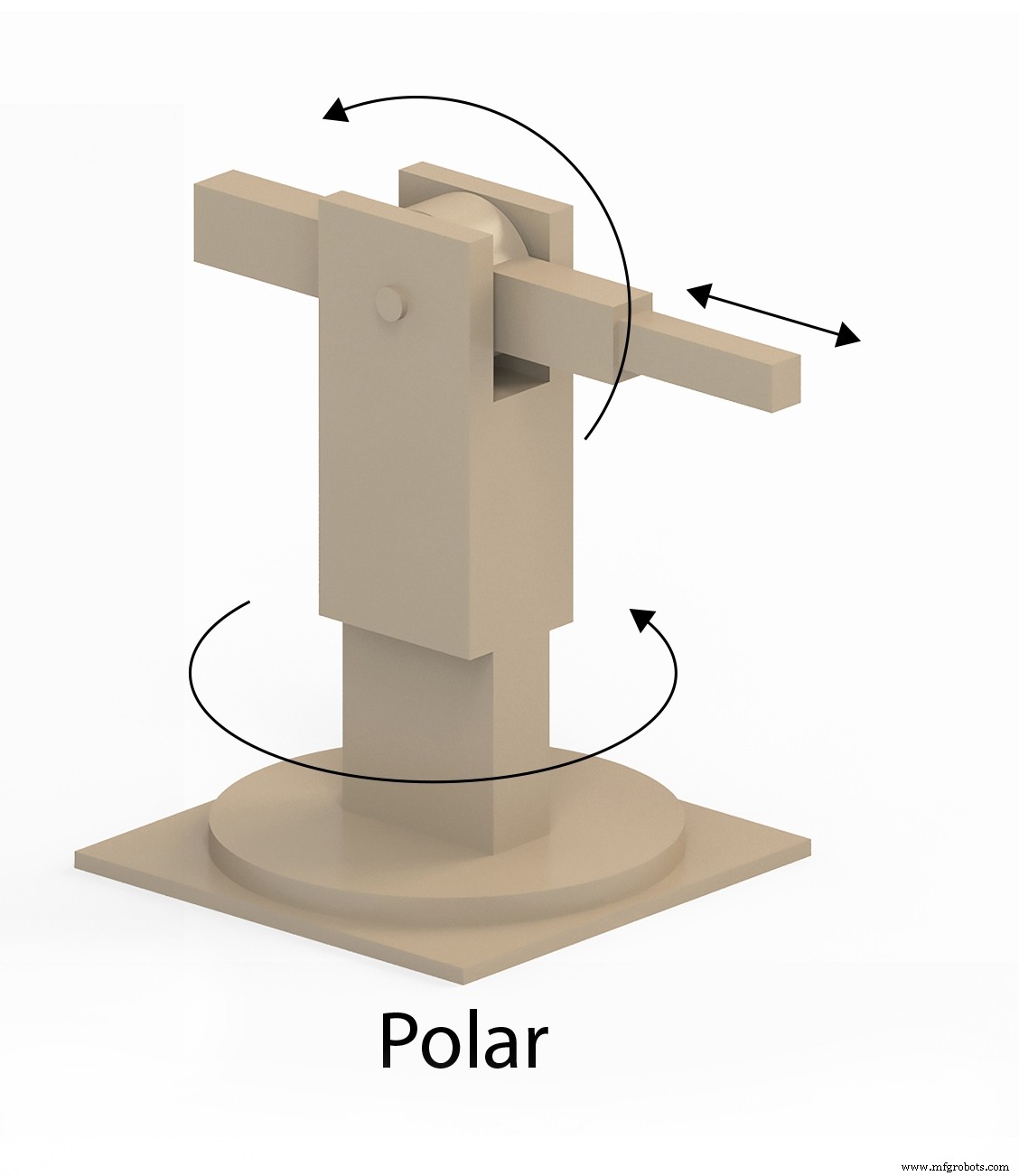
폴라 로봇(구형 로봇이라고도 함)은 회전 관절 2개와 선형 관절 1개가 조합되어 있습니다. 그들의 디자인은 구형 작업 공간을 만듭니다.
흥미로운 사실: 1950년대에 만들어진 최초의 산업용 로봇인 "Unimate"는 구형 로봇이었습니다.
Polar 로봇은 사출 성형, 페인팅, 아크 용접, 스폿 용접에 사용할 수 있습니다. 적절한 크기의 선형 암을 장착하면 긴 도달 거리를 가질 수 있습니다.
폴라 로봇은 구형 기술이며 관절형 팔 로봇(구형 작업 영역도 있음)으로 대체할 수 있지만 일부 애플리케이션에서는 폴라 로봇이 대안보다 비용 효율적일 수 있습니다.
장점: 픽 앤 플레이스 작업을 위한 로봇 팔의 가장 빠른 설계. 경량. 정확한.
단점: 비교적 작고 가벼운 물체로 제한됩니다. 수직면에 있는 물체 작업에는 적합하지 않습니다. 제한된 범위.
델타 로봇 (병렬 로봇이라고도 함) 평행사변형 모양의 로봇 팔 3개가 있습니다. 일반적으로 델타 로봇은 공작물 위에 위치하며 머리 위 받침대에 부착됩니다. 모든 모터가 베이스에 있기 때문에 로봇의 관절과 팔은 다른 로봇에 비해 매우 가볍습니다. Delta 로봇에는 거꾸로 된 돔 모양의 작업 봉투가 있습니다.
흥미로운 사실: Delta 로봇은 원래 초콜릿 제조업체가 초콜릿 조각을 집어 상자에 넣을 수 있도록 설계되었습니다.

Delta 로봇의 설계는 빠르고 정확한 작동을 가능하게 합니다. 델타 로봇은 주로 픽 앤 플레이스 애플리케이션에 사용됩니다. 추가 응용 프로그램에는 접착제 분배, 납땜 및 조립이 포함됩니다. Delta 로봇은 무거운 페이로드를 운반할 수 없으므로 EoAT(End of Arm Tooling) 유형과 처리할 수 있는 작업이 제한됩니다.
Delta 로봇의 하이브리드 설계는 동작의 유연성을 높이기 위해 팔 끝에 회전 조인트를 배치하는 경우가 있습니다.
장점: 엄격한. 정확한. 원형 기하학이 필요한 응용 분야에 적합합니다.
단점: 더 오래된 기술. 움직임의 유연성이 제한됩니다.
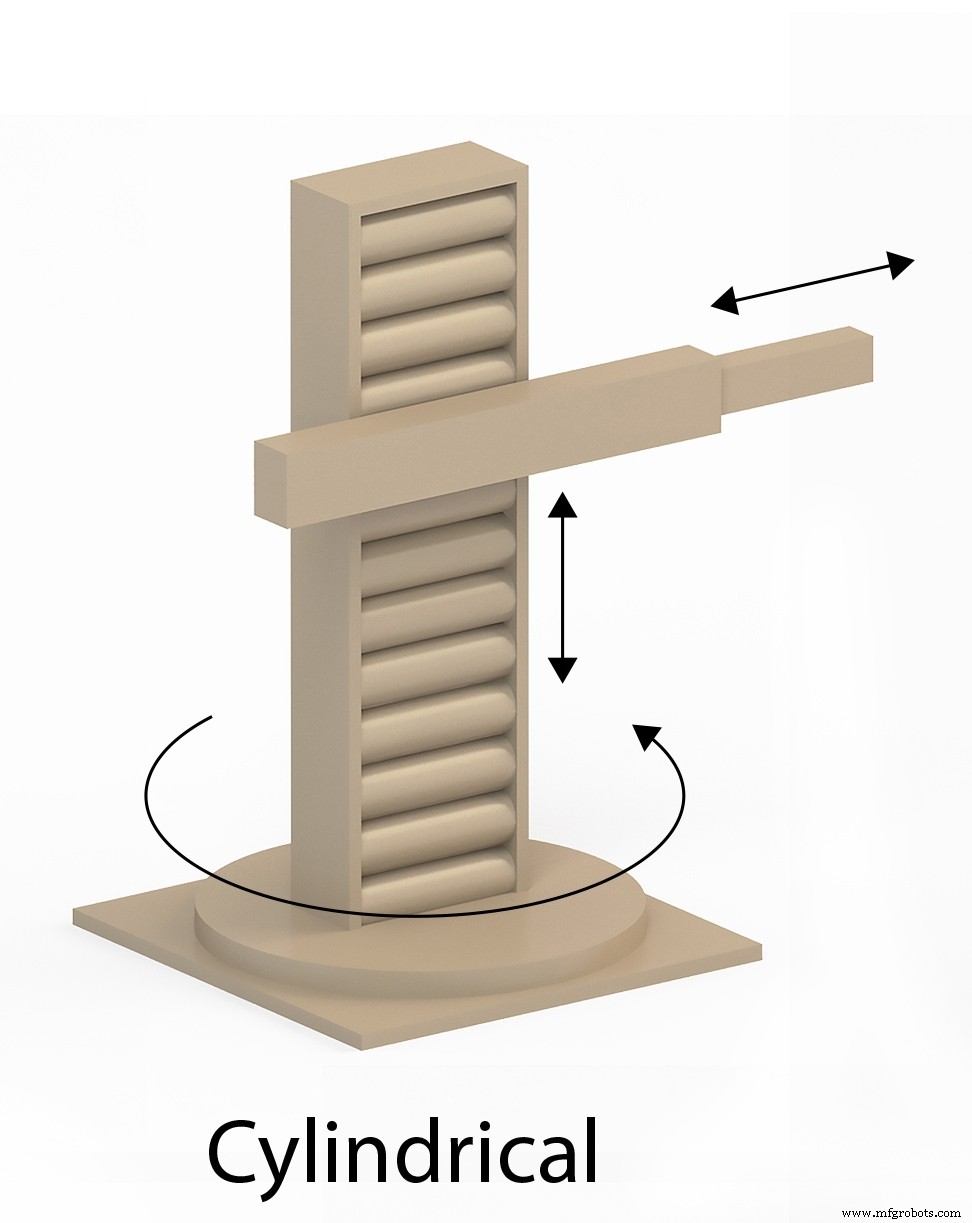
원통형 로봇 베이스에 최소 하나의 회전 조인트와 두 개의 선형 조인트가 있습니다. 이 디자인은 원통형 작업 공간으로 이어집니다.
원통형 로봇은 일반적으로 좁은 작업 공간에서 사용되며 원형 대칭이 필요한 물체(예:와이어, 파이프)에 적합합니다. 그라인딩, 조립, 스폿 용접 애플리케이션은 원통형 로봇을 사용합니다.
장점: 사람들과 함께 일하는 것이 안전합니다. 최신 인터페이스를 통해 로봇 팔에 코드를 작성하지 않고도 수행할 작업을 "가르칠" 수 있습니다.
단점: 항상 가장 빠른 종류의 로봇 팔은 아닙니다. 힘과 속도가 제한됩니다.
협동 로봇(코봇)은 기존 산업용 로봇 애플리케이션에서 취한 울타리나 기타 안전 조치 없이 안전한 작업 환경에서 인간과 로봇의 상호 작용을 가능하게 합니다. 그러나 안전 조치로 인해 작동 속도가 저하됩니다.

인간과 함께 작동하는 것이 안전하다는 점 외에도 협동로봇을 더욱 협력적으로 만드는 기능 중 하나는 프로그래밍 코드를 작성하지 않고도 로봇 팔에 동작을 가르칠 수 있는 기능입니다. 작업자는 로봇 팔을 잡고 로봇이 가야 할 방향으로 물리적으로 움직입니다. 그러면 로봇 팔이 시연된 동작을 복제할 수 있습니다.
표준 협동로봇은 일반적으로 매우 무거운 물체를 다루도록 설계되지 않았습니다. 이로 인해 관리할 수 있는 제품의 범위가 제한됩니다.
협동 로봇은 머신 텐딩, 픽 앤 플레이스, 조립, 아크 용접과 같은 광범위한 응용 분야를 가지고 있지만 일반적으로 무거운 작업이나 초고속 작업에는 적합하지 않습니다.

AMR 또는 자율 이동 로봇은 산업용 로봇 시장에서 빠르게 성장하는 부문을 나타냅니다. 그들은 수행하도록 설계된 작업에 최적화된 다양한 모양과 크기로 제공됩니다.
카트 또는 바퀴가 달린 차량 형태의 AMR은 일반적으로 공장이나 창고 시설 내에서 상품을 운송하는 데 사용됩니다. 여기에는 센서, 온보드 컴퓨팅 성능 및 전기 모터가 장착되어 있어 시설 주변을 이동하고 시설 내부 지도를 생성할 수 있습니다. 이것은 종종 원격 제어로 안내하는 AMR을 따라가는 사람과 함께 수행됩니다.
내부 지도가 생성되면 AMR은 이동해야 하는 목적지에 대해 지시를 받을 수 있습니다. AMR의 주요 기능은 한 장소에서 다른 장소로 독립적으로("자율적으로") 이동하여 도중에 장애물을 피할 수 있다는 것입니다. 사람, 지게차 또는 기타 물체가 앞을 가로막는 경우 장애물을 피하기 위해 방향을 틀거나 목적지까지 완전히 새로운 경로를 계획할 수도 있습니다.
AMR의 자율 기능은 컨베이어 시스템에 비해 매우 유연합니다.
바퀴 달린 카트 형태의 AMR은 개별적으로 상품을 운송하는 데 사용할 수 있으며 로봇 떼 또는 떼의 일부로 사용할 수도 있습니다. 예를 들어 Amazon에서는 AMR 집합을 사용합니다. Amazon은 각 로봇이 전체 제품 선반을 집어 들고 주문 피킹 스테이션에 있는 사람에게 가져오는 "상품 대 개인" 구성을 사용합니다. 그런 다음 그 사람은 선반에서 제품을 선택하고 전자 상거래 주문 이행을 위해 컨테이너에 넣습니다.
최근에는 컴퓨터 비전, 인공 지능 및 그리퍼 기술의 발전으로 피킹 스테이션에 있는 사람을 관절식 로봇 팔로 대체하는 것이 가능해졌습니다. 이 경우 바퀴 달린 카트 AMR은 로봇 간 협업을 위해 상품을 로봇 팔로 가져옵니다.
AGV는 일반적으로 바퀴가 달린 차량 형태이며 AMR보다 오래된 기술입니다. 그들은 온보드 지능이 적기 때문에 AMR만큼 자율적이지 않습니다. AGV는 시설의 지도를 만드는 기능이 없습니다. 대신, 그들은 그들에게 주어진 길에 의존합니다. 경로는 바닥에 배치된 와이어, 특수 테이프 또는 기타 종류의 가이드로 정의됩니다. AGV가 경로에서 장애물을 만나면 멈추고 도움을 요청할 수만 있습니다.
그러나 AGV와 AMR의 구분이 점점 흐려지고 있습니다. AGV에는 더 많은 온보드 컴퓨팅 성능이 제공되고 있으며 일부는 이제 경로의 장애물을 우회할 수 있습니다.
로봇 팔은 바퀴 달린 카트 AMR 위에 장착할 수 있습니다. 이는 로봇의 유연성과 로봇이 수행할 수 있는 작업의 다양성을 증가시킵니다. 한 가지 응용 프로그램은 전체 행의 공작 기계를 관리하기 위해 그러한 로봇을 사용하는 것입니다. 로봇은 완성된 부품을 내리고 새 공작물을 하나의 기계에 로드한 다음 행 아래로 이동하여 일련의 기계에 대한 작업을 반복할 수 있습니다.
수백만 명의 사람들이 Boston Dynamics에서 만든 춤추는 로봇의 YouTube 비디오를 보았고 따라서 두 발 달린 로봇과 네 발 달린 로봇을 보았습니다. 다리가 있는 로봇의 산업용 용도 중 하나는 패키지 배달을 위해 로봇을 배치하는 것입니다. 또 다른 사용 사례는 수색 및 구조 작업입니다.
바퀴 대신 다리를 사용하면 몇 가지 장점이 있습니다. 다리를 통해 로봇은 바퀴가 달린 카트가 어렵거나 불가능하다고 생각하는 일부 지형을 이동할 수 있습니다. 다리는 계단을 오를 수 있게 하고 바퀴가 달린 카트보다 더 쉽게 차량에 승하차합니다.
구형 형태의 자율 이동 로봇은 상업적으로 이용 가능하며 다른 폼 팩터에 비해 특별한 이점이 있습니다. 구형 AMR의 시스템 구성 요소는 내구성 있는 쉘 내부에 밀봉되어 있습니다. 따라서 열악한 환경에서도 작동할 수 있습니다. 그들은 또한 물 위에 뜨고 여행할 수 있습니다. 구형 AMR은 수륙 양용일 수 있으며 물과 육지 모두를 여행합니다.
구형 AMR의 추진 시스템은 가장 일반적으로 무게 중심 이동을 기반으로 합니다.
구형 AMR의 산업용 애플리케이션은 주로 감시 및 원격 검사에 있습니다. 카메라와 통신이 장착되어 원격 운영자에게 비디오를 다시 전송할 수 있습니다. 유독 가스 또는 기타 위험한 조건이 있을 수 있는 적대적인 환경의 경우 구형 AMR이 이상적일 수 있습니다.
무인항공기(UAV) 또는 드론은 다양한 산업적 목적으로 점점 더 많이 사용되고 있습니다. 한 가지 응용 프로그램은 창고에서 드론을 사용하여 재고를 수집하는 것입니다. 무인 항공기는 창고의 통로를 비행하고 컴퓨터 비전을 사용하여 선반에 있는 상자에 있는 품목의 수를 계산할 수 있습니다.

설계에 따라 산업용 드론은 일종의 자율 이동 로봇(AMR)이 될 수 있습니다. 일부 모델은 자동으로 장애물을 감지하고 회피하며 목적지까지 독립적으로 이동할 수 있기 때문입니다. 일부 산업용 드론에는 스트립 채광 작업 또는 인프라 프로젝트 위로 비행하는 것으로 구성될 수 있는 "임무"가 주어질 수 있습니다. 드론은 자율적으로 임무를 수행하며 프로젝트의 비디오를 녹화하거나 특정 측정을 수행하고 기록할 수 있습니다. 이러한 드론은 건설 프로젝트의 진행 상황을 모니터링하는 데 사용할 수 있습니다.
아마존과 다른 회사들은 이미 내구재와 식료품 배달을 위해 드론을 제한적으로 사용하고 있습니다.

수중에서 사용하도록 설계된 다양한 로봇이 있습니다. 일부 수중 로봇은 자율적으로 설계되었으며(자율 수중 차량 - UAV), 일부는 무선 또는 유선 테더로 원격 제어되도록 만들어졌습니다. 일부 수중 로봇은 잠수함과 유사한 추진 시스템으로 프로펠러를 사용합니다. 반면에, 그러한 많은 로봇은 추진력을 위해 생물의 행동을 모방합니다. 일부는 돌고래의 행동을 모방하고, 다른 일부는 뱀을 모방하고, 다른 일부는 물고기처럼 움직입니다. 이러한 방식으로 자연을 모방하는 것을 로봇의 행동이 생물학적 생물을 모방하기 때문에 "생체모방"이라고 합니다.
수중 로봇은 해양 석유 플랫폼, 파이프라인 검사 및 과학 연구에 사용할 수 있습니다. 다른 응용 프로그램에는 수중 로봇을 사용하여 교량 바닥을 검사하고, 수력 발전 댐 입구를 검사하고, 산호초를 검사하는 것이 포함됩니다.
수중 로봇은 증거를 찾기 위해 수중 바닥의 비디오 녹화를 위해 경찰서에서 사용하고 있습니다. 군은 수중 로봇에도 관심을 갖고 있다. 소나 시스템이 로봇 '돌고래'와 실제 돌고래를 구별할 수 있을까요?
수중 로봇의 장점은 많습니다. 이러한 로봇은 인간 다이버의 위험과 비용을 초래할 필요가 없음을 의미합니다. 로봇은 사람보다 더 오래 물속에 있을 수 있습니다. Equipping underwater robots with sensors enables them to measure and record an almost infinite number and types of properties
HowToRobot is a global platform helping companies to succeed with automation. By using the HowToRobot worldwide directory of over 15,000 robotics companies, you can find the type of robot you need, ideally suited for your application.
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Please note there are impartial HowToRobot experts who can help you navigate through the process. Click here to set up a consultation with an expert advisor.
산업용 로봇
로봇이 수행할 수 있는 작업의 범위는 매년 빠르게 확장되고 있습니다. 지난 수십 년 동안 로봇은 인간에게 위험하거나 지루하거나 피곤한 많은 프로세스에서 육체 노동자를 대체했습니다. 자동화는 육체 노동에 비해 제조업체의 정밀도, 속도 및 효율성을 향상시킬 수 있습니다. 산업용 로봇은 무거운 물체 들어 올리기, 화학 물질 취급, 도장 및 조립 작업 수행과 같은 반복적이거나 위험한 작업에 이상적입니다. 그들은 자동차 및 제조 산업에서 발견됩니다. 산업용 로봇의 첫 번째 유형은 데카르트/갠트리 로봇입니다. 3개의 조인트가 있는 암이 장착
컨베이어 벨트가 등장하기 전에 제조업체와 유통업체는 인력에 크게 의존했습니다. 제품의 수동 취급은 작업자의 안전과 제품 품질을 위험에 빠뜨렸습니다. 회전 풀리와 벨트의 간단한 시스템은 오늘날 모든 제품 중심 산업에서 제품 취급을 간소화합니다. 컨베이어 벨트에 사용되는 기술은 과거의 단순한 벨트 시스템보다 훨씬 더 정교합니다. 회사는 사용 사례에 따라 최신 벨트를 선택합니다. 예를 들어, 직조된 금속 벨트는 보석이나 섬세한 제품을 잘 다루지 못합니다. 다양한 유형의 컨베이어 벨트와 그 용도를 이해하는 제품 취급 회사는 필요에 따라