

임베디드

산업 제조
이 주제에 대한 내 첫 두 블로그에서 DSP가 갑자기 모든 곳에서 나타나는 이유와 특히 DSP가 보다 유연하고 미래 지향적인 옵션으로 일부 사용자 지정 하드웨어 가속기(HWA)를 대체하기 시작하는 이유에 대해 이야기했습니다. 이 블로그에서는 HWA 구현보다 DSP에 대해 생각해야 하는지 결정하기 위해 따를 수 있는 더 자세한 분석에 대해 이야기하고 싶습니다.

(출처:CEVA)
지난 블로그에서 DSP를 위한 이상적인 애플리케이션에 대해 언급했습니다. 모뎀 또는 오디오 신호에 대한 신호 처리가 명백한 예입니다. 또 다른 매우 일반적인 예는 모뎀의 신호 처리와 매우 유사한 자율주행차용 레이더의 신호 처리입니다. 이들 중 다수는 소형 컨트롤러와 결합된 하드웨어 가속기를 중심으로 구축되었습니다. 우리는 현재 HWA에서 처리하는 신호 처리와 일부 제어를 결합하여 더 많은 기능이 DSP에서 실행되는 소프트웨어를 기반으로 하는 아키텍처로 전환하려는 솔루션 제공업체 사이의 상당한 추세를 보고 있습니다. 추론은 간단합니다. 소프트웨어는 기능 면에서 더 많은 유연성을 제공하고 훨씬 더 저렴하고 빠르게 발전하는 통신 표준에 적응할 수 있는 능력을 제공합니다.
글로벌 포지셔닝은 삼각 측량 계산을 위해 DSP에 내재된 수학 기능을 많이 활용하는 또 다른 애플리케이션입니다. 처음에는 GPS 지원만 있으면 된다고 생각할 수 있으며 아마도 하드웨어 가속기에서 정말 빠른 구현을 구축할 수 있을 것입니다. 그러나 글로벌 GNSS 표준에서는 GLONASS(러시아), Galileo(유럽) 및 BeiDou(중국)에 대한 지원도 고려해야 합니다. DSP에서 실행 중인 경우 소프트웨어에서 모든 변형을 지원할 수 있으므로 GPS에 대한 유선 구현은 시장을 불필요하게 제한할 수 있습니다.
지금까지는 원칙적으로 매우 훌륭하지만 DSP 구현이 맞춤형 하드웨어 구현과 비교하여 어떻게 수행됩니까? 오늘 인기 있는 한 가지 예를 들어 설명하겠습니다. IoT 애플리케이션을 구축 중이고 통신에 NB-IoT를 사용할 계획이라고 가정해 보겠습니다. 서브 프레임 길이는 해당 시간 내에 완료되어야 하는 특정 처리에 대한 경계 한계를 정의하는 1ms입니다. 이 예에서 여기에는 물리 계층 알고리즘, L1 제어 코드 및 프로토콜 스택이 포함됩니다. 100MHz에서 실행되는 일반적인 저전력 DSP/NB-IoT 플랫폼의 경우 1ms는 이러한 계산을 완료하는 데 100k 주기를 제공합니다.
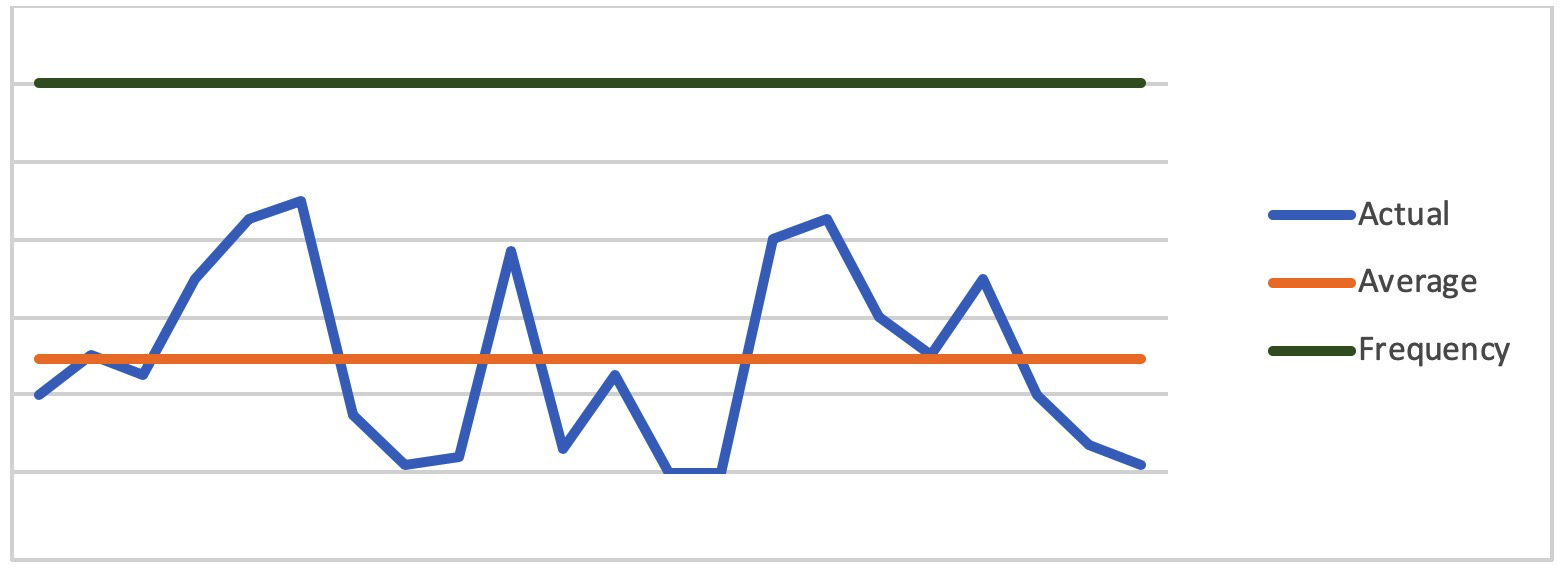
동등한 DSP 구현에서 기대할 수 있는 성능을 추정하려면 임베디드 DSP 공급업체와 협력해야 합니다. 이러한 회사는 이미 여러 애플리케이션을 위한 플랫폼에 소프트웨어 솔루션을 제공해야 하며, 이는 성능과 성능을 특징으로 하게 될 것입니다. 성능을 위해 그들은 당신에게 당신의 기능(이 경우 NB-IoT 모뎀)에 대한 사이클 카운트 추정치를 제공할 수 있어야 하며, 아래의 것과 유사한 그래프를 제공할 수 있어야 합니다. 그래프의 각 지점은 실행에 필요한 사이클 수를 나타내며 그래프는 시간에 따라 변하는 부하 범위에 대해 차트로 표시됩니다. 그래프는 선택한 작동 주파수에서 허용 가능한 최대 주기도 보여야 합니다.
(출처:CEVA)
이제 애플리케이션 로드가 해당 빈도에서 작동하는지 또는 더 많은 헤드룸을 제공하기 위해 빈도를 늘려야 하는지 여부를 추정하는 방법이 있습니다. 물론 이 추정치는 공급업체의 소프트웨어 구현을 기반으로 하지만 상당히 잘 조정될 것으로 예상하는 것이 합리적입니다. 그들의 소프트웨어를 사용하기로 약정할 필요는 없지만 추정치는 당신의 의사 결정을 안내하기에 충분해야 합니다.
선호하는 작동 주파수에서 여유 공간이 충분하다면 더 많은 HWA 기능을 DSP로 옮기거나 GNSS 위치 지원과 같은 차별화된 기능을 추가할 수 있습니다. 반면에 대기 시간 요구 사항을 충족하기 위해 주파수를 높여야 하는 경우에도 가능하지만 주파수를 높이면 면적과 전력 소비가 증가한다는 점을 고려해야 합니다.
전력을 추정하는 빠른 방법은 병렬 처리, MAC 장치 등을 사용하여 진정한 DSP 코드에 들어갈 소프트웨어의 양과 제어 코드에 들어가는 양(일반적인 일반)을 보는 것입니다. 목적 코드 호출 기능, 의사 결정 및 기타 표준 작업. 일반적으로 40% 제어 코드와 60% DSP 코드와 같이 이 분할을 확인할 수 있습니다. DSP 공급업체는 종종 이 두 가지 경우에 대한 일반적인 전력 수치를 제공합니다. 예를 들어 제어 코드의 경우 2mW, DSP 코드의 경우 4mW(각 경우 100MHz)입니다. 계산 시 DSP의 평균 활동(예:주파수의 50%)을 고려해야 합니다. 따라서 이 예에서는 (0.4 * 2 + 0.6 * 4) * 0.5 =1.6mW 평균 전력을 추정합니다(50% 평균 활동 가정).
요약하면, 가속기 기능의 DSP 구현에 대해 예상할 수 있는 성능과 전력에 대한 꽤 합리적인 추정치를 개발할 수 있어야 합니다(정말 특이한 것을 개발하지 않는 한 – 이 경우 DSP에서 애플리케이션을 모델링해야 합니다. 주기 수에 대한 매우 정확한 추정을 얻기 위한 SW 도구). 소프트웨어 구현에서 얻을 수 있는 추가 유연성과 하나의 프로세서에 여러 가속기를 결합하여 비용을 절감할 수 있는 기능을 고려할 때 DSP 솔루션은 매우 매력적으로 보입니다.
임베디드
저는 소규모 제조업체가 성과를 높일 수 있도록 매일 작업하는 MEP 센터, MEP 프로그램, 제조업체에 대한 생산성의 근본적인 중요성에 계속 초점을 맞추는 것을 제 개인적인 십자군으로 만들었습니다. 현재 환경에서 생산성에 대한 게시물을 읽는 것이 이상하게 보일 수 있지만 국가 경제와 비즈니스 성공 모두에 여전히 중요합니다. 실제로 현재의 건강 및 경제 위기에서 회복함에 따라 생산성이 훨씬 더 중요해질 것입니다. 현재 자본과 노동력 모두에 상당한 초과 용량이 있어 경제가 더 빨리 성장하고 완전 고용으로 돌아가고 장비가 더 완전히 사용
Arduino 근접 센서는 감지 범위 내에서 물체의 존재를 감지하는 편리하고 저렴한 가제트입니다. 이것은 인간에서 애완 동물 또는 벌레와 같은 작은 것일 수 있습니다! 직접 만드는 것은 정말 쉽습니다. Arduino 근접 센서가 어떻게 작동하는지 알고 싶었던 적이 있습니까? IR(적외선)파를 사용하여 감지 거리 내에서 가까운 물체를 감지합니다. 이 문서에서는 Arduino 근접 센서에 대한 모든 것을 다룰 것입니다. . 시작하겠습니다! (아두이노 우노 브레드보드) Arduino 근접 센서란 무엇입니까? Arduino