

임베디드

산업 제조
고성능 모터에는 향상된 부드러움, 신뢰성 및 효율성을 보장하는 제어 메커니즘이 필요합니다. 이러한 애플리케이션의 가장 적절한 예 중 하나는 전기 자동차(EV) 파워트레인에 사용되는 모터로, FOC(Field-Oriented Control) 기반 시스템으로 제어할 수 있습니다.
EV 파워트레인이 원활하게 구동되기 위해서는 모터가 넓은 범위의 속도에서 작동하고 가장 낮은 속도에서 최대 토크를 낼 수 있는 제어 방식이 필요합니다. 엄밀히 말하면 모터 제어는 토크와 자속을 기반으로 해야 하므로 전류를 제어하여 토크를 정확하게 제어할 수 있습니다.
모터의 회전자를 회전시키는 기본 원리는 고정자에 자기장을 생성하는 것입니다. 이것은 교류로 고정자 코일에 전원을 공급하여 수행됩니다. 모터가 원활하게 작동하는 비결은 회전자의 자속축과 고정자의 자기축이 이루는 각도인 회전자의 위치를 아는 데 있습니다. 이 값이 알려지면 고정자 전류는 회전자의 토크 축과 정렬됩니다. 최대 효율을 달성하려면 고정자 자속이 회전자 자속에 수직이어야 합니다.
FOC 기반 모터 제어
종이에 전형적인 FOC(Field-Oriented Control) 기반 모터 제어 시스템은 그림 1과 같이 나타납니다.
전체 크기 이미지를 보려면 클릭하세요.
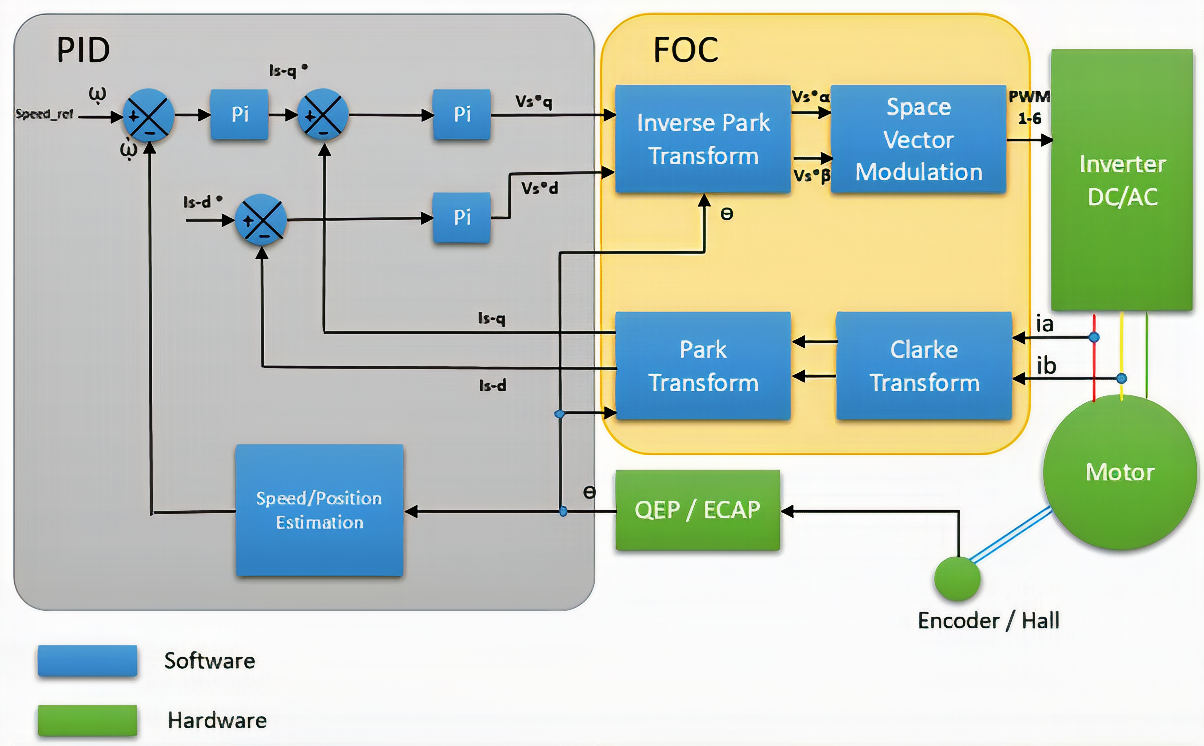
그림 1:이 다이어그램은 FOC 기반 모터 제어 시스템의 하드웨어 및 소프트웨어 구성 요소를 보여줍니다. 출처:텍사스 인스트루먼트
각 소프트웨어 및 하드웨어 구성 요소를 이해해 보겠습니다.
<올>다음으로 이러한 구성 요소가 FOC 알고리즘을 사용하여 모터를 구동하는 데 어떻게 사용되는지 살펴보겠습니다.
FOC 워크플로 보기
3상 전기 모터를 제어하려면 위상 전류 Ia, Ib, Ic를 읽어 모터에 적절한 전압을 공급해야 합니다. 제어가 없으면 회전자 자속 벡터와 90도인 고정자 자속 벡터를 생성할 수 없습니다.
FOC는 FOC를 개발하는 것이 상당히 복잡하지만 이를 달성하는 데 도움이 되는 수학 집약적인 알고리즘입니다. FOC 알고리즘은 3상 정현파 전류 참조 프레임을 자속 및 토크(d-q) 참조 프레임으로 분해하여 제어를 단순화할 수 있습니다. 이 두 구성 요소는 별도로 제어할 수 있습니다.
그림 1은 로터의 위치를 결정하고 이를 속도/위치 블록으로 전달하는 인코더/홀을 보여줍니다. 이 값은 Park 및 역 Park 변환 블록에도 제공됩니다. 같은 경우 모터의 위상 전류(ia, ib)가 Clarke 변환 블록에 공급됩니다. 모터의 위상 전류는 Clarke 변환에 의해 두 개의 직교 전류(iα, iβ)로 변환됩니다. 새로 변환된 위상 전류는 이제 각각 토크 생성 전류 및 자속 생성 전류를 의미합니다. 위상 전류를 자속 및 토크 구성 요소로 성공적으로 분해했지만 여전히 정현파이므로 계속 변경되므로 제어하기가 어렵습니다.
FOC 알고리즘의 다음 작업은 하나의 중요한 입력인 로터 위치가 필요한 사인파를 제거하는 것입니다. 다이어그램에서 이 값이 Park-transform 블록에도 제공되는 것을 볼 수 있습니다. 이 블록에서 트릭은 고정자 관점에서 고정된 기준 좌표계에서 회전자의 관점에서 회전하는 기준 좌표계로 이동하는 것입니다. 간단히 말해서 Park-transformation 블록은 두 개의 AC 전류(iα, iβ)를 DC 전류로 변환합니다. 이렇게 하면 PID 블록이 원하는 방식으로 제어하기가 매우 쉽습니다.
이제 PID 블록을 그림으로 가져와 보겠습니다. FOC 블록에서 PID 블록으로의 입력은 Iq 및 Id, 토크 및 자속 성분입니다. EV의 맥락에서 PID 블록은 운전자가 스로틀을 작동할 때 속도 참조를 수신합니다. PID 블록은 이제 두 값을 비교하고 오류를 계산합니다. 이 오차는 PID 블록이 모터를 회전시켜야 하는 값입니다. PID 블록이 제공하는 출력은 Vq 및 Vd입니다. 이 출력은 Clarke 및 Park 변환의 정반대 현상이 발생하는 역 Clarke 및 Park 변환에 도달합니다. 역 Park 변환 블록은 모터의 위상이 정류될 수 있도록 회전하는 기준 좌표계를 고정된 기준 좌표계로 변환합니다.
전체 크기 이미지를 보려면 클릭하세요.
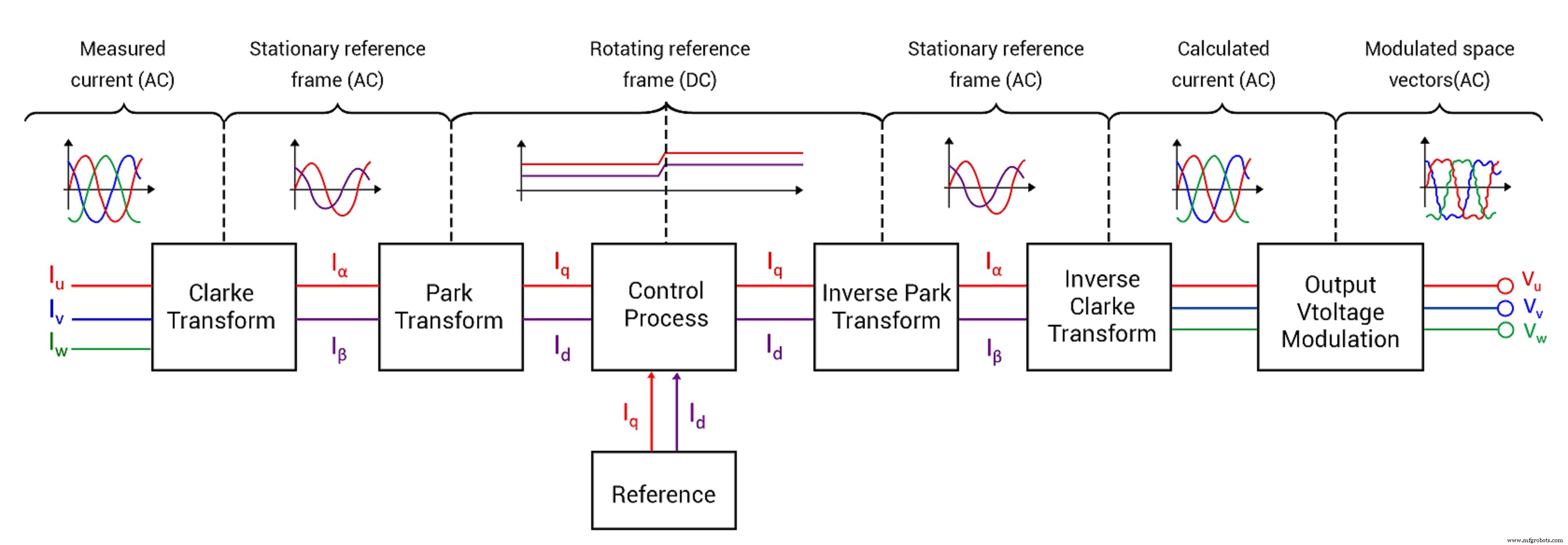
그림 2:PID의 출력은 Clarke 및 Park 변환과 정확히 반대되는 반전이 발생하는 역 Clarke 및 Park 변환에 도달합니다. 출처:텍사스 인스트루먼트
FOC 알고리즘 기반 모터 제어의 마지막 단계에서는 공간 벡터 변조(SVM)의 역할이 매우 중요합니다. SVM의 역할은 모터를 구동하는 3상 전압을 차례로 생성하는 인버터로 공급되는 PWM 신호를 생성하는 것입니다. 어떤 면에서 SVM은 역 클라크 변환 작업도 수행합니다.
3상 인버터에는 출력 전압을 모터에 전달하는 6개의 트랜지스터가 있습니다. 기본적으로 이러한 출력은 상단 트랜지스터가 닫히고 하단 트랜지스터가 열려 있어야 하는 두 가지 상태가 있거나 그 반대의 경우도 마찬가지입니다. 2개의 상태와 3개의 출력으로 총 8개의 상태(2 3 )를 계산할 수 있다. 기본 벡터라고도 하는 이 8가지 상태를 육각형 별 다이어그램에 플로팅하면 위상차 측면에서 인접한 각 벡터가 60도 떨어져 있음을 알 수 있습니다. SVM은 출력 전압을 제공하는 평균 벡터를 찾습니다(Vout ).
사실상의 EV 모터 제어
모터 제어 체계로서의 FOC는 EV 설계에 필수적입니다. EV가 요구하는 소음이 없고 부드러운 모터 작동과 함께 FOC는 매우 적합합니다. 많은 OEM 및 제어 시스템 개발자는 종종 EV 프로그램의 고유한 요구 사항에 맞게 표준 FOC 알고리즘을 조정하지만 핵심 개념은 동일하게 유지됩니다.
Microchip의 PIC18Fxx39 마이크로컨트롤러 제품군 또는 TI의 C2000 실시간 마이크로컨트롤러와 같은 자동차 등급 MCU의 발전은 EV 모터 제어 시스템을 위한 FOC 알고리즘 개발을 가속화할 수 있습니다.
>> 이 기사는 원래 자매 사이트인 EDN에 게시되었습니다. .
 바이바브 아난드 Embitel의 디지털 마케팅 임원입니다.
바이바브 아난드 Embitel의 디지털 마케팅 임원입니다.  사우라브 S. 코베 Embitel의 임베디드 엔지니어입니다.
사우라브 S. 코베 Embitel의 임베디드 엔지니어입니다.
관련 콘텐츠:
더 많은 Embedded를 보려면 Embedded의 주간 이메일 뉴스레터를 구독하세요.
임베디드
기계 자동화는 회사의 경쟁 우위를 개선하고 생산 비용을 절감하며 제품 품질을 향상시킵니다. 자동화의 가장 분명한 이점은 인건비를 절감하고 위험한 환경에서 육체 노동자를 구출할 뿐만 아니라 정확성과 정밀도를 향상시키면서 에너지와 재료를 절약한다는 것입니다. 두 가지 유형의 자동화에는 피드백 제어와 시퀀스 제어가 포함됩니다. 피드백 제어는 지속적이며 센서로 측정하고 조정하는 작업을 포함합니다. 순차 제어는 프로그램된 작동 순서가 수행될 때 사용됩니다. 일반적으로 단일 컴퓨터는 산업용 애플리케이션에서 피드백과 시퀀스 제어를 모두 제공합
목재 부품의 샌딩, 광택 또는 마무리를 개선하려는 경우 ABB의 통합 Force Control 소프트웨어보다 더 이상 찾을 필요가 없습니다. ABB는 항상 고객을 염두에 둡니다. 이것은 로봇의 품질과 회사의 놀라운 고객 서비스를 반영합니다. ABB가 개발한 자동화 솔루션은 목재 산업이 총 생산성을 높이고 타의 추종을 불허하는 정밀도와 믿을 수 없을 정도로 빠른 ROI를 제공하고 제품 생산의 전체 속도를 높이는 데 도움이 됩니다. 이러한 통계를 보면 그들이 목재 부문에 서비스를 제공하는 선도적인 로봇 제조업체 중 하나라는 것은 놀라