

나노물질

산업 제조
인간의 생리적 건강에 대한 신뢰할 수 있는 지표로서 호흡수는 낭포성 섬유증으로 인한 잠재적인 호흡기 질환 및 호흡기 기능 장애의 예측 및 진단에 점점 더 많이 활용되고 있습니다. 그러나, 기존의 임상 호흡 모니터링 시스템은 스마트 모바일 전자 장치에 비해 복잡한 구조, 복잡한 조작성, 외부 전원 의존성으로 인해 일상 생활에서 실시간 호흡 모니터링을 위한 가정용 웨어러블 장치로 작동하기가 편리하지 않습니다. 따라서 우리는 복부 둘레의 변화를 감지하여 호흡수를 모니터링하기 위해 측면 슬라이딩 모드 마찰 전기 나노 발전기(TENG)를 기반으로 하는 웨어러블 무선 호흡 센서를 제안합니다. 본 논문에서는 확립된 이론적 모델을 통해 호흡 모니터링 센서로서의 장치의 가능성을 검증하고 일련의 기계적 테스트를 통해 센서의 출력 성능을 조사합니다. 또한 다양한 개인, 다양한 호흡 리듬, 다양한 활성 상태 및 무선 전송에 대한 호흡 센서의 적용은 많은 자원 봉사 테스트에 의해 검증되었습니다. 모든 결과는 제안된 웨어러블 센서가 일반적인 적용 가능성과 감도로 실시간 호흡수를 감지하고 모니터링하기 위한 새로운 대안으로서 잠재력을 보여줍니다.
지구적 기후 악화, 심각한 대기 오염 증가, 노령 인구의 악화 경향과 함께 인간의 건강, 특히 호흡기의 건강은 점점 더 많은 위협에 노출되어 있습니다[1,2,3]. 한편, 인간의 신체적 건강에 대한 모니터링은 잠복질환 예방을 위한 관심의 초점이 되고 있다[4,5,6,7]. 호흡수는 인간의 생리적 건강을 직접적으로 반영하는 가장 중요하고 신뢰할 수 있는 지표 중 하나로서 폐쇄성 수면 무호흡 증후군(OSAS) 및 낭포성 섬유증으로 인한 호흡 기능 장애와 같은 잠재적인 호흡기 질환의 예측 및 진단에 핵심 정보를 제공할 수 있습니다[8, 9,10,11]. 호흡 상태를 모니터링하기 위해 사용되는 다양한 전통 의료 장비가 있으며 혁신적인 호흡 모니터링을 위한 기술 개발에도 남다른 노력을 기울이고 있습니다. 뛰어난 임상 적용성과 모니터링 정확도에도 불구하고 복잡한 구조, 복잡한 조작성, 외부 전원에 대한 의존도, 나쁜 휴대성 등으로 인해 스마트 모바일 의료 전자 기기로의 발전이 제한됩니다. 최근 몇 년 동안 모바일 네트워크 및 저전력 전자 장치의 발전으로 지능형 모바일 의료 기기가 엄청난 속도로 발전했으며 가정용 의료 및 유연한 웨어러블 전자 장치에 대한 관심이 증가했습니다[6, 12,13,14,15,16, 17,18]. 따라서 스마트 방식으로 호흡 모니터링을 위한 잠재력이 큰 배터리가 필요 없는 웨어러블 헬스케어 센서가 도처에서 요구되고 있습니다.
전자기[19, 20] 및 압전[21,22,23,24,25], 마찰전기 나노발전기(TENG)[26,27,28,29,30]와 같은 비교적 성숙한 바이오에너지 소거 기술과 비교하여 경량, 고밀도 에너지 및 높은 감지 감도는 바이오 에너지 수확기, 웨어러블 전자 장치 및 자체 전원 건강 모니터링 장치와 같은 응용 분야에서 더 나은 잠재력을 가지고 있습니다. 또한 TENG 기반 에너지 하베스터는 사람의 호흡과 같이 10 Hz 미만의 주파수 대역을 가진 작업 환경에서 바이오 에너지를 더 잘 소거할 수 있으며[31, 32], TENG에 사용되는 재료는 무연으로 사용하기에 안전합니다. 의료 센서. 따라서 TENG는 의심할 여지 없이 웨어러블 및 자체 전원 호흡 모니터링 장치를 위한 최고의 선택 중 하나입니다. 웨어러블 및 자체 전원 건강 모니터링 기술에 대한 증가하는 요구를 충족하기 위해 많은 새로운 TENG 기반 센서가 개발되어 인간의 생리적 상태를 모니터링합니다. Linet al. 통해 심박수 모니터링을 위한 자가 전원 무선 신체 센서 네트워크(BSN) 시스템 제안 2018년에는 구조 기반 TENG(D-TENG), 전원 관리 회로, TENG 기반 심박수 센서, 신호 처리 장치 및 무선 데이터 전송을 위한 Bluetooth 모듈의 통합 [13]. P. Maharjan et al. 2018년에 새로운 곡선 모양의 웨어러블 하이브리드 전자기-TENG(WHEM-TENG)을 설계했으며, 스윙 암에서 수확한 생체 역학 에너지로 구동되는 전자 손목 시계로 작동하며, 맥박 신호 및 심박수 모니터링에도 전력을 공급하는 것으로 입증되었습니다. 17]. Chen et al. 2017년에 인간의 피부와 같은 부드러운 표면에 컨포멀하게 부착되어 전기방사된 나노섬유 매트를 기반으로 다양한 터치 에너지를 수집하고 호흡 정보 및 요골 동맥 펄스와 같은 실시간 생리 신호를 모니터링할 수 있는 압전 및 마찰전기 특성의 유연한 하이브리드 나노발전기를 보고했습니다. 33]. Cu et al. 2018년에 인간 피부에 대한 높은 유연성과 편안함을 지닌 단일 전극 TENG 기반 펄스 센서를 보고했으며, 이를 통해 요골 동맥 압력파를 나타내는 전형적인 인간 펄스 파형을 성공적으로 얻을 수 있습니다[34]. 위에서 언급한 작업은 인간의 물리적 모니터링에서 TENG 기반 웨어러블 및 자체 전원 지능형 장치의 개발을 크게 촉진했습니다.
복부 둘레의 변화는 호흡 과정에서 인간의 자연스러운 물리적 행동이므로 복부 변형에서 정보를 포착하는 것은 감지 접근 방식이며 인간의 정상적인 활동에 부정적인 영향을 미치지 않으며 생체 운동 에너지를 소거하여 가능한 에너지원이 될 수 있습니다. . 본 논문에서는 휴대성, 이동성, 지능성을 동시에 갖춘 슬라이딩 모드 TENG 기반의 통합형 허리 착용형 무선 호흡 센서를 제안한다. 지속적인 실시간 호흡 모니터링 및 OSAS 감지를 위해 다양한 일상 활동에 적용할 수 있으며 장치의 정상적인 기능에 부정적인 영향을 미치거나 사용자의 일상 활동에 부정적인 영향을 미치지 않습니다. TENG 센서로 스마트 벨트를 구축하여 호흡 중 사용자의 복부 둘레 변화를 감지하고 주기적인 변화를 TENG의 마찰 쌍의 왕복 진동으로 전달하여 호흡 정보가 포함된 전기 신호를 출력할 수 있습니다. 텐. 전체 감지 프로세스에는 외부 전원이 필요하지 않습니다. 이 장치에는 호흡 신호 전송을 실현하기 위해 외부 소스에서 전원을 공급받는 무선 전송 칩도 장착되어 있습니다. 호흡 상태에 대한 정보는 최종적으로 휴대폰에 표시됩니다. 여기에서 실시간 호흡 모니터링을 위한 지능형 웨어러블 및 자체 전원 장치로서의 탁월한 잠재력을 보여주기 위해 TENG 기반 호흡 센서에 대한 연구 작업을 보고합니다.
그림 1a는 슬라이딩 모드 TENG를 기반으로 하는 호흡 센서의 개략적인 구조를 보여줍니다. 허리 착용형 호흡 센서는 그림 1a(i)와 같이 일상 생활에서 사용자의 실시간 호흡 상태를 감지하도록 설계되었습니다. 이러한 종류의 모니터링 전략은 걷기, 수면, 요리, 사무 등과 같은 착용자의 일상적인 활동을 방해하지 않습니다. 장치는 웨어러블 이중층 벨트, 벨트에 내장된 슬라이딩 모드 TENG 센서 및 무선 전송 시스템. 이중층 벨트의 각 층은 그림 1a(ii)와 같이 검은색 선으로 표시된 확장할 수 없는 부분과 빨간색 선으로 표시된 변형 가능한 부분을 포함합니다. TENG 센서는 그림 1a(iii-iv)와 같은 세부 구조로 웨어러블 이중층 벨트에 내장되어 있습니다. 100 μm 두께의 PTFE(Polytetrafluoroethylene) 필름과 30 μm 두께의 나일론 필름이 각각 음극 및 양극 마찰재로 사용되었습니다. 두께가 50 μm인 두 개의 동박이 전도성 전극으로 마찰층의 외부 표면에 부착됩니다. 유전체 재료를 평평하게 유지하기 위해 두 개의 아크릴 시트가 지지대로 사용됩니다. TENG 기기의 대패 크기는 5 × 5 cm 2 입니다. . TENG 장치는 호흡 모니터링 과정에서 마찰 쌍 사이의 접촉을 보장하기 위해 플라스틱 슬리브로 코팅되어 있습니다.
<그림>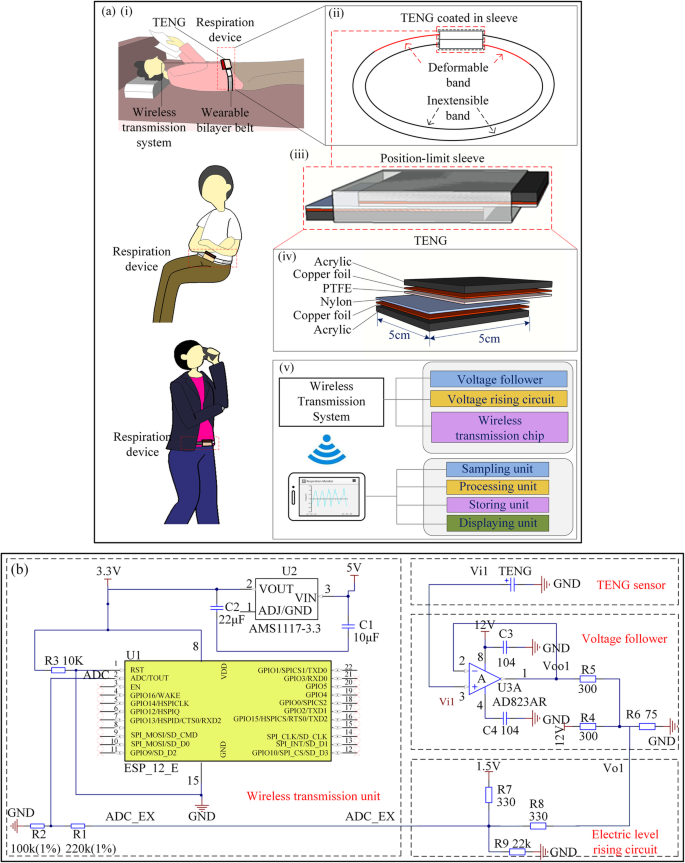
허리 착용형 호흡 센서 및 무선 전송 시스템 제작. 아 무선 호흡 센서의 개략도. (i) 착용을 위한 개략도, (ii) 웨어러블 장치의 구조적 스케치, (iii) TENG의 확장된 보기 및 (iv) TENG의 재료 설명, (v) 무선 전송 시스템에 포함된 기능 모듈. ㄴ 무선 전송 시스템의 회로도
장치의 구조는 일련의 명백한 장점으로 설계되었습니다. 먼저 벨트의 변형 가능한 부분을 활용하여 호흡 중 복부의 팽창을 수용하고 들숨 과정에서 복부의 수축 과정에서 복원력을 제공하여 지속적인 신호로 실시간 감지가 가능합니다. 사용자의 정상적인 활동에 불편함과 부정적인 영향이 없는 스마트 벨트를 통해 구현됩니다. 둘째, 벨트의 확장할 수 없는 부분은 벨트의 변형을 제한하여 복부 둘레 변화의 일부가 마찰 쌍의 슬라이딩 동작을 구동하는 데 사용되도록 하는 데 사용됩니다. 또한 단순한 구조와 장치에 상용 재료를 채택하여 비용이 저렴하고 제작이 용이하여 시장성 있는 판촉 가능성이 있습니다.
또한 신호 전송을 위한 무선 전송 시스템을 구성하기 위해 하드웨어와 소프트웨어 모듈의 집합이 적용되며, 실시간 호흡 정보가 휴대폰에 표시된다고 가정한다(Fig. 1a(v)). 그림 1b와 같이 전압 팔로워, 전압 상승 회로 및 무선 전송 칩으로 구성된 하드웨어 모듈이 회로 기판에 집적되어 있습니다. TENG는 고전압을 출력하지만 상대적으로 낮은 전류를 출력하므로 출력 임피던스가 높고 무선 전송 시스템에서의 적용 가능성에 영향을 줍니다. 이와 관련하여 전압 팔로워는 회로에 통합되어 TENG의 출력 임피던스를 낮추어 무선 전송 장치의 출력 임피던스와 대략 일치할 수 있습니다. 또한 실제 적용 가능성을 고려하여 TENG의 전기 출력은 교류로 특성화되며 이 중 음의 신호 값은 아날로그 디지털 변환기(ADC)의 입력 신호로 사용할 수 없습니다. 따라서 전기적 레벨 상승 회로는 ADC가 전체 신호를 획득할 수 있도록 TENG의 출력 전압의 전체 신호 곡선을 양의 레벨로 높이는 데 사용됩니다. 무선 전송 칩은 ADC, 마이크로 프로세서, 안테나 및 장치에 전원을 공급하는 배터리로 구성됩니다. 소프트웨어 모듈에는 신호 샘플링, 신호 처리, 신호 저장 및 신호 표시 장치가 포함됩니다. 신호 샘플링 및 처리 장치를 통해 휴대폰으로 전송된 신호는 양수 및 음수 구성 요소가 있는 진동으로 다시 변환되지만 신호 파형 및 진폭은 TENG 출력의 원래 값에 비례하여 다시 변환되지 않습니다. 따라서 이는 호흡수만을 나타냅니다. 그리고 신호 표시부와 신호 저장부를 통해 전송된 실시간 호흡수 신호를 체계적으로 저장하여 휴대폰에 표시합니다.
사람의 호흡은 크게 흉식호흡과 복식호흡으로 나뉜다. 흉부 호흡 과정에서 날숨과 날숨 과정이 각각 일어나면서 복강이 주기적으로 팽창 및 수축되어 허리에 부착된 착용형 벨트의 신축과 수축을 유발할 수 있다. 한편, 마찰 쌍은 복부 둘레의 변형을 통해 외부 및 내부로 강제로 미끄러진다. 왕복 슬라이딩 과정에서 TENG 장치가 있는 스마트 벨트를 통해 호흡 상태를 얻습니다.
그림 2는 슬라이딩 모드 TENG를 기반으로 하는 호흡 센서의 작동 메커니즘을 보여줍니다. 복강 둘레의 변화는 착용 가능한 이중층 벨트를 통한 마찰 쌍의 상대적인 슬라이딩을 용이하게 하여 외부 회로를 통과하는 교류를 유도할 수 있으며, 이는 캡처되어 호흡 모니터링에서 신호로 처리됩니다. 각 작업 주기에는 초기 친밀한 접촉, 바깥쪽으로 미끄러짐, 짧은 일시 중지 및 안쪽으로 미끄러지는 네 가지 프로세스가 있습니다. 그림 2a와 같은 초기 상태와 같이 마찰 쌍의 표면이 완전히 중첩되어 서로 밀접하게 접촉하고 나일론 필름과 PTFE 필름의 표면은 마찰 전기 효과로 인해 각각 양전하와 음전하를 띠고 있습니다. 및 정전기 유도. 이 단계에서는 표면 전하가 회로에서 전하 이동 없이 정적 균형에 있는 마찰 쌍 사이에 슬라이딩 동작이 없습니다. 호기가 시작되고 마찰 쌍이 복강의 확장과 함께 바깥쪽으로 미끄러지기 시작하면(그림 2b) 마찰 전하의 분리는 마찰 쌍 사이에 전위차를 유도합니다. 따라서 자유 전자는 외부 회로를 통해 한 전극에서 다른 전극으로 전달되고 양의 진폭을 갖는 출력 전압 펄스가 생성됩니다. 호기 과정에서 마찰 쌍이 최대 슬라이딩 거리에 도달하면(그림 2c), 전달된 전하가 피크 값에 도달하고 회로를 통해 더 이상 전류가 흐르지 않습니다. 그런 다음 복강의 수축과 함께 마찰 쌍이 안쪽으로 미끄러지기 시작하는 흡입 과정(그림 2d)이 옵니다. 전극의 중복 전송 전하는 새로운 정전기 균형을 위해 다시 흐르고 음의 진폭을 갖는 출력 전압 펄스가 생성됩니다. 마찰 쌍의 대전된 표면이 완전히 겹쳐지면 전하가 이동하지 않으며 TENG 장치는 그림 2a와 같이 긴밀한 접촉 상태로 돌아갑니다. 이러한 방식으로 마찰 쌍 사이에서 외부 및 내부 진동이 반복적으로 발생하면 전자가 두 전극 사이의 회로에서 앞뒤로 구동되어 교류 출력을 생성합니다.
<그림>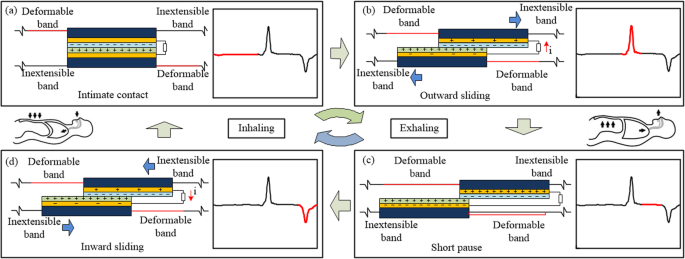
호흡 센서의 작동 메커니즘 다이어그램과 4가지 작동 프로세스. 아 "밀접한 접촉" 과정:사용자가 흡입하고 마찰 쌍의 표면이 완전히 겹칩니다. ㄴ "외향 슬라이딩" 프로세스:사용자가 숨을 내쉬고 마찰 쌍이 바깥쪽으로 미끄러집니다. ㄷ "짧은 일시 중지" 프로세스:사용자가 숨을 내쉬고 마찰 쌍이 최대한 바깥쪽으로 미끄러집니다. d "내부 슬라이딩" 프로세스:사용자가 숨을 들이쉬고 마찰 쌍이 안쪽으로 미끄러집니다.
호흡 센서의 전기 출력 성능은 Keysight B2983A 시스템 전위계로 기록되었습니다.
임상 적용의 경우 호흡수는 OSAS와 같은 호흡기 질환의 조기 경고 및 신속한 진단에 중요한 정보를 제공할 수 있습니다. 본 논문에서는 호흡 과정에서 복부 둘레의 변화를 감지하고 무선 신호를 휴대폰에 표시하여 실시간 호흡 모니터링을 위한 대안을 제시하기 위해 허리 착용형 무선 호흡 센서를 제안한다. 장치의 구성에는 착용 가능한 이중층 벨트, 벨트에 내장된 슬라이딩 모드 TENG 센서 및 무선 전송 시스템이 포함됩니다. 그리고 장치의 적용 가능성, 휴대성 및 정확성은 자원 봉사자에 의한 이론 분석, 기계적 테스트 및 실시간 테스트를 통해 검증되었습니다.
먼저 TENG의 출력 성능을 예측하고 호흡 모니터링 센서로 장치의 가능성을 검증하기 위해 분석 모델이 설정됩니다. 해석 모델의 정확성을 검사하기 위해 실시간 테스트가 수행됩니다. 또한, 센서의 전기 신호와 입력 기계적 여기 사이의 상관 관계는 이론적인 모델에 의해 설정되고 조사되어 센서의 작동 메커니즘에 대한 더 나은 이해를 제공합니다. 이러한 목적을 위해 호기와 흡기 단계를 포함하는 호흡 과정을 시뮬레이션하기 위한 이론적 기능이 제안됩니다. 호기 단계에서 복강이 확장되고 마찰 쌍이 바깥쪽으로 미끄러져 변위 x(t) 마찰 쌍의 0에서 A까지 점진적으로 증가합니다. . 그런 다음 마찰 쌍은 최대 변위 A를 유지합니다. 흡입 과정까지. 흡입 단계에서 복강이 수축하고 마찰 쌍이 안쪽으로 미끄러지기 시작하여 변위 x(t) A에서 점차 감소 제로. 그 후, 마찰 쌍은 다음 호흡 주기까지 0의 변위를 유지합니다. x(t)의 변동 규정에 따르면 시간 영역에서 장치에 대한 가진은 다음과 같이 표현되는 사다리꼴 파동으로 가정됩니다(그림 3a).
$$ x(t)=\left\{\begin{array}{c}{v}_1t\\ {}A\\ {}A-{v}_2t\\ {}0\end{array}\kern0 .75em \begin{array}{c}0여기서 d 0 =d 1 /ε r 1 + d 2 /ε r 2 d의 유효 두께입니다. 1 (d 2 ) 및 ε r 1 (ε r 2 )은 각각 유전층의 두께와 비유전율을 나타내며, ε 0 진공의 유전 상수, σ 표면 전하 밀도, R 부하 저항 및 S 유전체 판의 면적입니다.
<그림>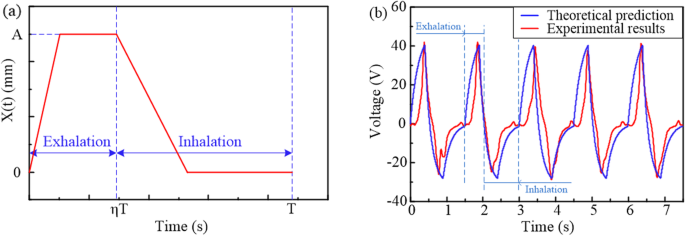
호흡 중 물리적 움직임과 TENG 센서의 출력 전압 사이의 상관관계. 아 이론적 예측을 위한 가정된 사다리꼴 형태의 변위. ㄴ 이론적 예측과 실험 결과 비교
장치는 전기 기계 모델을 이론적으로 검증하는 경우로 활용되며 물리적 특성 및 하중 프로세스의 매개변수는 Tab에 나와 있습니다. 1. 계산된 출력 전압의 시간 이력은 그림 3b의 파란색 선으로 표시되고 측정된 전압 신호는 빨간색 선으로 표시됩니다. 이론적 예측과 측정된 신호 사이에 탁월한 일치가 관찰되어 분석 모델이 호흡 과정에서 장치의 전기 출력을 예측하는 데 정확함을 시사합니다. 또한 예측된 호흡 신호의 전압 펄스는 들숨 및 날숨 과정과 일치함을 보여줍니다. 신호는 호기와 들숨 과정의 발생에 따라 각각 양의 신호와 음의 신호로 동작하며 상승 및 하강합니다. 또한 성능과 감도를 향상시키기 위해 구조적 매개변수에서 TENG 기반 호흡 센서의 최적 설계에 활용될 수 있습니다.
장치의 출력 전압 신호에 대한 마찰 쌍의 슬라이딩 변위의 영향을 조사하기 위해 기계적 테스트가 수행되었습니다. 그림 4a와 같이 마찰 쌍의 두 끝을 스트레칭 기계에 고정하고 마찰 쌍을 스트레칭 기계를 통해 주기적인 왕복 슬라이딩 진동을 가하여 호흡에서 마찰 쌍의 움직임을 시뮬레이션했습니다. 프로세스. 한편, 전기회로의 부하저항이 11MΩ인 전압계로 측정한 전압신호와 비교하기 위하여 신축과정에서 미끄럼 변위와 견인력의 시간이력을 기록하였다. 기계적 시험에서는 0.5 Hz의 주파수와 2.5 ~30 mm의 변위 진폭을 갖는 사다리꼴 여기를 이용하였다. 그림 4b는 빨간색 선으로 출력 전압의 시간 이력과 녹색 및 파란색 선으로 각각 진폭 30 mm 및 견인력의 슬라이딩 변위의 해당 시간 이력을 보여줍니다. 단계 I에서 마찰 쌍 사이의 변위가 기계의 견인력에 따라 증가하는 동안 출력 전압의 양의 펄스가 캡처됩니다. 그리고 2단계에서는 출력전압이 반대 신호를 나타내면서 견인력이 점차 상쇄되고 변위가 감소한다. 전압 신호의 주기적인 특성은 설정 기계적 가진의 슬라이딩 변위 및 견인력의 특성과 잘 일치하여 실시간 호흡 모니터링을 위한 TENG 센서의 가능성을 보여줍니다. 또한 얻은 전압 신호는 2.5 ~30 mm(그림 4c)의 다양한 슬라이딩 진폭에서 분명히 변하므로 변위 진폭(즉, 호흡 깊이)의 영향을 조사할 수 있습니다. 피크 전압 대 변위 진폭의 변화 경향은 그림 4d에 나와 있습니다. 분명히 피크 전압은 변위 진폭에 따라 선형적으로 증가하고 변동 관계는 다음과 같이 설명될 수 있습니다.
$$ {V}_{\mathrm{피크}}=0.01383{X}_{\mathrm{최대}}+0.0092 $$ (3)여기서 V 피크 는 출력 전압의 피크 값이며 X 최대 마찰 쌍의 최대 슬라이딩 변위를 의미합니다. 식의 규정. (3) 적용 가능한 범위가 "2.5 mm≤ X인 장치의 피크 전압과 변위 여기 간의 관계를 나타냅니다. 최대 ≤30 mm”이며, 이는 복부 둘레가 피크 전압에 미치는 영향과 호흡 과정에서 센서의 피크 전압 예측에 따른 영향을 학습할 수 있는 기초를 제공합니다. 한편, 그림 4d는 견인력의 진폭과 3.09 N 및 2.5 mm의 작은 슬라이딩 변위로 센서의 유용한 전기 신호를 캡처할 수 있음을 보여주므로 장치를 쉽게 구동할 수 있음을 의미합니다. 사용자에게 불편함을 주지 않으면서 복부 둘레의 변화를 줄 수 있습니다.
<그림>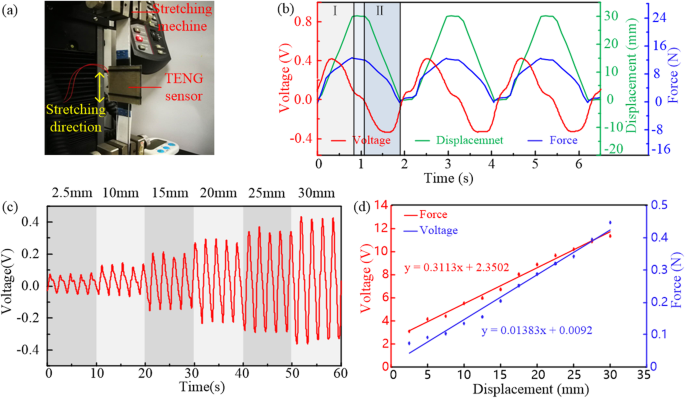
TENG 기반 호흡 센서에 대한 기계적 테스트. 아 스트레칭 기계에 고정된 TENG 센서의 사진. ㄴ 사다리꼴 형태의 여기에서 센서의 출력 전압 신호와 슬라이딩 변위 및 힘의 해당 시간 이력. ㄷ 변위 진폭이 다른 센서의 출력 전압의 시간 이력. d 최대 슬라이딩 변위의 함수로서의 출력 전압 및 견인력의 피크 값
호흡 센서로 작동하는 장치의 가능성을 확인하기 위해 일련의 실시간 모니터링 테스트가 수행되었으며(그림 5a), 전기 회로의 부하 저항이 100MΩ인 전압계를 통해 전기 신호를 측정했습니다. . 호흡 과정에서 장치의 벨트는 사용자의 허리에 등각 접촉을 유지하고 사용자의 복부 환경의 변화는 마찰 쌍의 주기적인 왕복 슬라이딩 진동에 의해 반영됩니다. 자원 봉사자가 주기적으로 숨을 내쉬면서 양 및 음 진폭의 펄스를 포함한 출력 전압 신호가 나타납니다. 실제 응용에서 캡처된 전기 신호에는 호흡 과정, 즉 호흡수, 들숨 또는 날숨 과정 등과 관련된 더 많은 정보가 포함될 수 있습니다. 전압 신호의 주기적인 변화와 호흡의 작동 메커니즘 사이의 상관 관계를 설명함으로써 센서를 사용하면 측정된 신호에서 호흡에 대한 자세한 정보를 추출하는 것이 더 정확합니다. 따라서 실시간 테스트에서 하나의 호흡 주기를 예로 들어 상관 관계를 설명합니다(그림 5b). 호기 과정에서 힘이 가해지면 마찰 쌍은 바깥쪽으로 미끄러지며 호기 과정에 대한 감지에 따라 양의 진폭으로 출력 전압 펄스를 생성합니다. 그런 다음, 가해진 힘이 흡입 과정에서 점진적으로 취소되면 마찰 쌍이 안쪽으로 미끄러지며 흡입 과정의 감지에 따라 음의 진폭을 가진 출력 전압 펄스를 생성합니다. 위에서 언급한 분석을 기반으로 전압 신호를 활용하여 호흡 과정에 대한 깊은 이해를 얻을 수 있습니다.
<그림>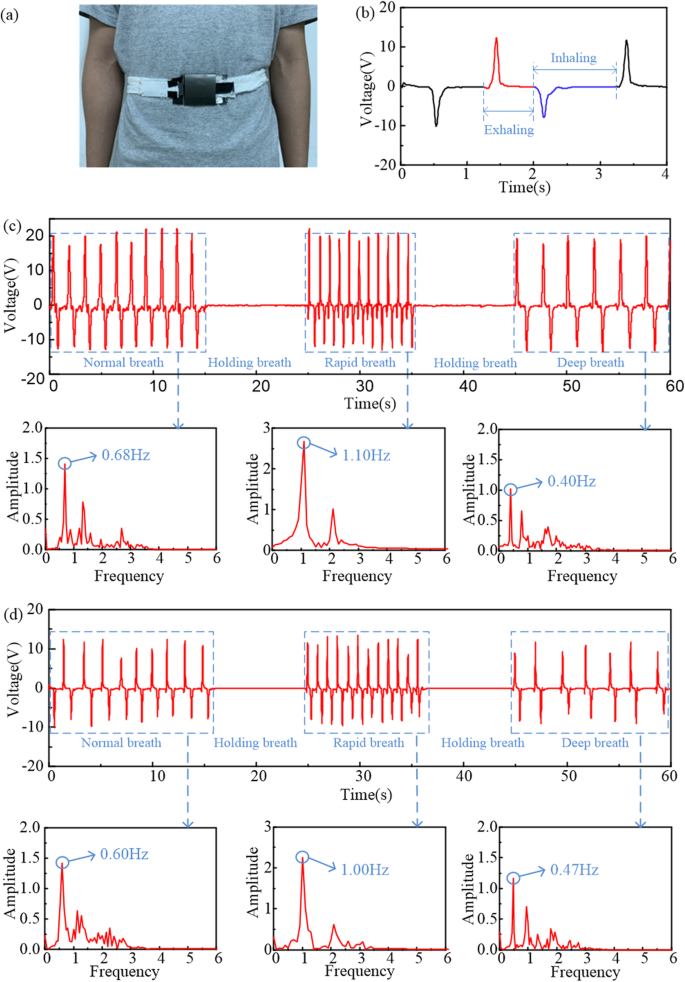
다양한 호흡 리듬을 모니터링하기 위한 슬라이딩 모드 TENG 호흡 센서. 아 호흡 모니터링을 위해 허리에 착용한 TENG 센서 사진. ㄴ 출력 전압 신호와 하나의 호흡 주기에서 날숨 및 흡입 과정 간의 일치. ㄷ , d 허리둘레가 다른 두 지원자에 대한 출력 전압 신호의 시간 기록(c의 경우 72.8 cm d의 경우 98.6 cm ) 및 다양한 호흡 리듬에 대한 FFT의 해당 결과
또한, 22세의 1명(허리둘레 72.8cm)과 24세(24세, 허리둘레 98.6cm)가 서로 다른 개인의 특정 호흡 행동을 반영하는 스마트 벨트의 능력을 테스트하기 위해 초대되었습니다. 다양한 호흡 수에 대한 장치의 민감도를 테스트하기 위해 자원 봉사자가 제공하는 호흡 과정에는 세 가지 다른 호흡 리듬, 즉 정상, 빠른 호흡 및 심호흡이 포함됩니다. 리듬이 다른 호흡 과정에서 TENG 센서에서 생성된 전기 신호가 성공적으로 감지되어 두 지원자에 대해 각각 그림 5c 및 d에 표시됩니다. 전압 신호는 각 리듬에 대해 반복 가능하고 신뢰할 수 있으며, 이는 호흡 과정에서 호흡 수의 명백한 차이를 나타냅니다. 두 지원자의 출력 전압(그림 5c 및 d)의 시간 이력은 각각 3가지 호흡 리듬의 과정에서 일정한 변화(일정한 주파수 및 피크-밸리 값)를 나타냅니다. Fig. 5c와 d에서 FFT(Fast Fourier Transform)의 결과를 반영하여 추출된 정상, 급속, 심호흡의 주파수는 22세 지원자와 0.60 각각 0.68, 1.10, 0.40 Hz이다. , 1.40 및 0.47 Hz는 24세입니다. 이는 건강한 성인의 적절한 호흡수입니다[37]. 이는 전기 신호를 통해 호흡수에 대한 주요 정보를 수집할 수 있음을 의미합니다. 한편, 테스트에 참가한 두 명의 지원자는 무호흡 증상으로 인한 호흡 정지를 시뮬레이션하기 위해 숨을 참도록 요청받았습니다. 이에 따라 그림 5c와 d에는 0볼트 값의 신호가 두 개의 서로 다른 호흡 리듬 사이에서 약 10 초 동안 지속되는 것으로 나와 있습니다. 이것은 OSAS에 대한 판단 기준으로 활용될 수 있으며 진단 및 경고에 추가로 부합할 수 있습니다. 이러한 결과는 이 TENG 센서가 호흡수뿐만 아니라 무호흡의 증상까지 감지할 수 있음을 보여줍니다.
또한 다양한 일상 활동에서 장치의 실용성을 확인하기 위해 여러 주에서 자원 봉사자가 일련의 실시간 테스트를 수행했습니다. 전압 신호는 누운 상태(그림 6a의 경우 I), 앉은 상태(그림 6b의 경우 II), 서 있는 상태(그림 6c의 경우 III)에서 부하 저항이 100MΩ인 전압계를 통해 측정되었습니다. , 그리고 3 km/h의 속도로 걷는다(그림 6d의 경우 IV). 그림 6a는 자원자가 누워서 수면 중 호흡 상태를 시뮬레이션하여 얻은 전압 신호를 나타내고 그림 6b-d는 자원자가 각각 앉고, 서고, 걸을 때 캡처한 전압 신호를 보여 주간 활동에서 호흡 과정을 시뮬레이션합니다. . I-IV의 모든 신호는 들숨과 날숨의 실제 과정과 일치하는 호흡 중 복부 둘레의 변화에 따라 안정적이고 지속적인 전압 펄스를 보여줍니다. 그리고 호흡수는 case I의 경우 0.54 Hz, case II의 경우 0.52 Hz, case III의 경우 0.72 Hz, case IV의 경우 0.65 Hz로 각각 검출되었습니다. 그림 6d에서 걷는 동안 신호 파형에 약간의 지터가 존재하지만 호흡 리듬을 모니터링하는 기능은 여전히 달성된다는 점에 주목할 가치가 있습니다. 네 가지 사례의 테스트는 일상 생활의 다양한 활동에서 실시간 호흡 모니터링을 위한 웨어러블 장치로서의 호흡 센서의 가능성을 보여줍니다. Furtherly, we carried out a long-time continuous respiration monitoring for 180 s and the detected signals are presented in Additional file 1:Figure S1. The time histories of the output voltage exhibit stable alteration with the breathing processes during the tests, which demonstrate the stability of the TENG sensor for long-time monitoring in practical applications.

The TENG sensor for real-time respiration monitoring in different daily activities. The captured voltage signals and the corresponding testing photographs in processes of respiration monitoring when volunteer is (a ) lying, (b ) sitting, (c ) standing, and (d ) walking at a speed of 3 km/h
To further improve the portability of the device as a wearable respiration sensor, a wireless transmission system was designed for the exhibition of the breathing information on a mobile electronic equipment. Specifically, a real-time monitoring test equipped with the wireless transmission system proposed in Fig. 1b was carried out and the electrical signals generated by the TENG sensor were wirelessly transmitted and displayed on a cell phone. Figure 7a shows the actual setup of the wireless transmission system and Fig. 7b shows the signal waveforms containing breathing information displayed on the phone via the wireless transmission system. The measured respiratory information of the volunteer in Fig. 7b have been further processed on a PC and shown in Fig. 7c for better viewing. The depicted waveforms in Fig. 7c suggest that the respiratory rate is about 0.625 Hz. And the exhalation and the inhalation stages of the breathing process are identified and marked in Fig. 7c, which indicates the perfect reflection of the electric signals displayed on the phone to the actual respiratory status and the reliability and practicality of the wireless transmission system. To further demonstrate the accuracy of the wireless signals, voltmeter signals (with electrical load resistance of 10 MΩ) after TENG and wireless signals after wireless system were captured in the same breathing test and compared in Additional file 1:Figure S2. It is worth to be mentioned that the amplitude of the wireless signals is not the true value of the output voltage of the TENG sensor, but being processed proportionally. On the one hand, the signal width of the wireless signals is much wider than the voltmeter signals, which can be attributed to a comprehensive outcome of the larger input impedance of voltage follower (100 TΩ) in the wireless transmission chip, the existing load loss of the circuit and the low sampling rate which make the signals distorted slightly. On the other hand, though the waveform and the peak value are changed after the wireless system, the information about the breathing cycle delivered by the wireless signals coincides well with that of the voltmeter signals, which means that the respiratory rates can be correctly reflected by the signals obtained from the wireless transmission chip.

Real-time respiration monitoring via the TENG sensor with the wireless transmission system. 아 Photograph of the actual setup of the wireless transmission system. ㄴ Photograph of volunteer’s real-time breathing signals displayed on a mobile phone. ㄷ The respiratory waveform depicted with the data stored by the wireless transmission system
In summary, we have designed and fabricated a waist-wearable wireless respiration sensor to monitor real-time respiratory status of humans in daily life and to transmit the breathing information to a mobile cell via a wireless transmission system. We furtherly illustrated its working mechanism in detail that it senses the variation of the abdominal circumference while breathing and output electrical signals containing rhythm information of the respiratory processes. In this study, theoretical analyses were performed to predict the output signals of the TENG and validate the possibility of the TENG to work as a respiration sensor. It was also demonstrated by a mechanical test that the sensor can be easily driven by a sliding displacement with an amplitude of 2.5 mm, which makes it feasible for use as a wearable sensor. To validate the applicability in reality, we carried out a series of tests by two volunteers to investigate the feasibility, accuracy, and sensitivity of the device to different individuals, different breathing rhythms, and different active states. The device was demonstrated applicable for not only the detection of apnea symptom but also the real-time monitoring of breath. Lastly, the wireless transmission system of the sensor was also proved to be efficient in wireless electrical signal transmission. Results stated above have shown the potential of the proposed sensor as a smart wearable respiration sensor and the household healthcare monitoring system comprehensively.
The data and materials used are included in the manuscript.
Analog digital converter
Fast Fourier transform
Obstructive sleep apnea syndrome
Polytetrafluoroethylene
Triboelectric nanogenerator
나노물질
장비에서 100도 얼굴이 녹는 것입니다. 목 뒤쪽의 피부는 태양에 물집이 생길 정도입니다. 이마에 묻은 땀방울을 닦을 때 손톱 아래에 흙, 기름, 때가 뭉쳐 있는 것을 볼 수 있습니다. 당신은 이미 시간을 확인하고 샤워를 하기를 고대하고 있습니다. 시간을 간략히 살펴보면 12시간 교대 근무에 8시간밖에 남지 않았음을 알 수 있습니다. 당신은 이 8시간의 모든 부분을 느끼고 있고, 숨쉬는 것이 점점 더 어려워지고 있다는 것을 깨달았습니다. 젠장, 마지막으로 인공호흡기 카트리지를 교체한 것이 언제였나요? 이런 순간을 경험한
오늘날 많은 사람들이 당뇨병을 앓고 있습니다. . 이러한 사람들에게는 엄격하고 지속적인 혈당 모니터링이 중요합니다. . 이것은 일반적으로 혈당 수치를 확인하는 효소 바이오센서를 사용하여 수행됩니다. 이러한 장치는 종종바늘을 사용해야 합니다 침습적이고 고통스러울 수 있으며 드문 테스트로 이어질 수 있는 샘플링을 위해. 따라서 현재 혈당 모니터링 장치에 대한 수요 증가가 있습니다. 환자에게 쉽고 비침습적입니다. 덜 고통스러운 혈당계를 고안하여 환자의 땀에서 포도당 모니터링에 중점을 둡니다. 이러한 맥락에서 e-ring 전도성 필라