

자동화 제어 시스템

산업 제조
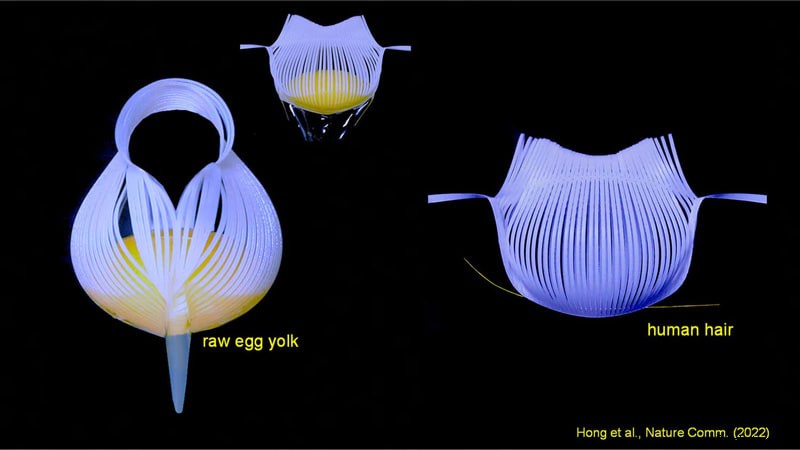
노스 캐롤라이나 주립 대학의 공학 연구원들은 섬세한 달걀 노른자를 깨뜨리지 않고 들어올릴 수 있고 사람의 머리카락을 들어올릴 만큼 정밀한 새로운 유형의 유연한 로봇 그리퍼를 시연했습니다. 이 작업에는 소프트 로봇과 생물의학 기술 모두에 대한 응용 프로그램이 있습니다.
이 작품은 2차원(2D) 시트를 자르고 접어 3차원(3D) 모양을 형성하는 키리가미(kirigami) 기술을 기반으로 합니다. 특히, 연구원들은 kirigami를 사용하여 많은 재료에 걸쳐 평행한 슬릿을 절단함으로써 2D 시트를 곡선형 3D 구조로 변환하는 것과 관련된 새로운 기술을 개발했습니다. 3D 구조의 최종 모양은 대부분 재료의 외부 경계에 의해 결정됩니다. 예를 들어 원형 경계가 있는 2D 재료는 구형 3D 모양을 형성합니다.
"우리는 사용자가 거꾸로 작업할 수 있는 모델을 정의하고 시연했습니다."라고 이 작업에 대한 논문의 첫 번째 저자인 Yaoye Hong이 말했습니다. "사용자가 어떤 종류의 곡선형 3D 구조가 필요한지 알고 있다면 우리의 접근 방식을 사용하여 2D 재료에 사용해야 하는 경계 모양과 슬릿 패턴을 결정할 수 있습니다. 재료를 밀거나 당기는 방향을 제어하여 최종 구조에 대한 추가 제어가 가능합니다.”
우리 기술은 2D 재료를 곡선형 3D 구조로 변환하는 이전 기술보다 훨씬 간단하며 설계자가 2D 재료에서 다양한 맞춤형 구조를 만들 수 있습니다.”라고 Jie Yin 교수가 말했습니다.
연구원들은 달걀 노른자에서 머리카락에 이르기까지 다양한 물체를 잡고 들어올릴 수 있는 그리퍼를 만들어 기술의 유용성을 입증했습니다.
"기존의 그리퍼는 물건을 단단히 잡습니다. 물건에 압력을 가하여 물건을 잡습니다."라고 Yin이 말했습니다. “그는 달걀 노른자와 같은 깨지기 쉬운 물건을 잡으려고 할 때 문제를 일으킬 수 있습니다. 그러나 우리의 그리퍼는 본질적으로 물체를 둘러싸고 있는 다음 들어올립니다. 물체 주위에 손을 감싸는 방식과 유사합니다. 이를 통해 정밀도를 유지하면서 섬세한 물체도 '잡아' 움직일 수 있습니다."
그러나 연구원들은 이 기술을 사용하여 인간의 무릎과 같은 관절의 모양에 맞는 생의학 기술을 설계하는 것과 같은 많은 다른 잠재적 응용 프로그램이 있음을 지적합니다.
"무릎이나 팔꿈치로 구부리고 움직일 수 있는 스마트 붕대나 모니터링 장치를 생각해 보세요."라고 Yin이 말했습니다. “이것은 우리의 기술이 작동하는 것을 보여주는 개념 증명 작업입니다. 우리는 현재 이 기술을 소프트 로봇 기술에 통합하여 산업 문제를 해결하는 과정에 있습니다. 우리는 또한 이 기술을 사용하여 인간의 무릎에 온기를 가하는 데 사용할 수 있는 장치를 만드는 데 사용할 수 있는 방법을 탐구하고 있습니다.
자동화 제어 시스템
자동화 로봇 머신 텐딩은 어떻게 작동합니까? 대부분의 머신 텐딩은 사람이 합니다. 기계 공장은 인간 인력을 사용하여 기계를 로드 및 언로드하고 완성된 부품이 제거되면 프로그램을 다시 시작합니다. 작업은 종종 반복적이며 자격을 갖춘 작업자를 찾기가 점점 더 어려워짐에 따라 회사는 직원 부족을 보완하기 위해 로봇 기계를 활용하고 있습니다. 머신 텐딩의 가장 인기있는 응용 프로그램은 로봇이 적재되는 기계 공장입니다. 그런 다음 기계는 프로그램을 실행하고 로봇은 완성된 부품을 꺼내 다른 원자재와 함께 기계에 로드합니다. 이 프로세스는 로
용접은 재료 및/또는 충전제를 가열, 혼합 및 냉각하여 두 재료를 함께 융합하여 강력한 결합을 형성하는 프로세스입니다. 아크 용접에서 스폿 용접에 이르기까지 신규 및 중고 용접 로봇은 일반적으로 필요한 용접이 반복적이고 품질과 속도가 중요한 용접 프로세스에 사용됩니다. 로봇 용접은 효율성, 일관성 및 ROI를 높이는 자동화된 프로세스입니다. 용접 로봇으로 공장을 자동화하면 더 빠르고 일관된 주기 시간, 생산 중단 없음, 더 나은 용접 품질 등 여러 가지 이점이 있습니다. 기본적으로 용접 로봇 자동화를 사용하면 프로세스 시간이 단