

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
 |
| |||
 |
| |||
|
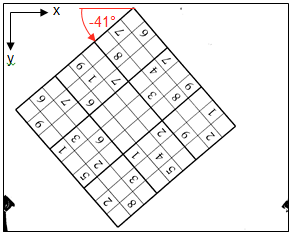
혼자서 스도쿠' 그리드를 풀고 채우는 로봇!
스도쿠는 컴퓨터가 몇 가지 간단한 수학 규칙을 따르기 때문에 자동으로 풀 수 있는 디지털 퍼즐입니다.


이 프로젝트의 주요 목표는 다음을 수행할 수 있는 3D 프린터 아이디어를 바탕으로 테이블을 플로팅하는 것과 같은 기초적이고 자율적인 로봇을 구축하는 것이었습니다.
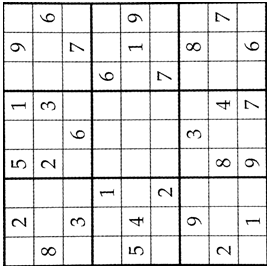
<울>즉, 로봇은 이미 채워진 상자와 값을 감지하고 아래의 채워진 격자와 같이 채우기를 진행하려면 해결해야 할 격자를 처리할 수 있어야 합니다.
어떻게 작동합니까?
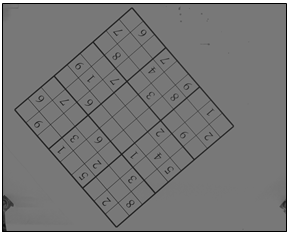
로봇의 하드웨어는 카메라와 함께 Raspberry Pi 3를 사용하는 것으로 구성됩니다. 그리드 사진은 프로세스 시작 시 촬영됩니다.
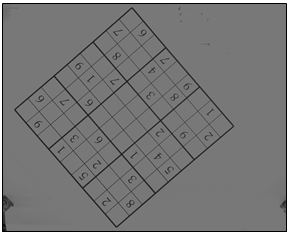
그런 다음 그리드는 인공물을 억제하기 위해 이미지 처리 방법을 사용하여 사전 처리됩니다. 그런 다음 격자에만 초점을 맞춘 그림을 얻기 위해 교정됩니다.
스도쿠 그리드가 확보되면 그리드를 분할하여 각 상자를 추출하고 신경망을 사용하여 이미지 인식을 진행합니다. 이 프로세스가 끝나면 그리드를 숫자로 표현하여 해결할 수 있습니다.
일단 라즈베리 파이를 해결하면 그리드를 채우기 위해 로봇의 모터를 제어하는 데 다시 사용됩니다.
요약하자면,
 <울>
<울>
결과
필요한 기술 <울>
유용한 도구 및 API <울>
참조 <울>
프로젝트에 대한 자세한 내용은 주저하지 말고 Github에서 저에게 연락하십시오.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">제조공정
배경 산업용 로봇은 어느 정도 인간의 움직임을 복제하는 기계 장치입니다. 인명에 대한 위험을 줄이거나, 인명보다 더 강한 강도나 정확도를 제공해야 하는 경우, 또는 지속적인 작동이 필요한 경우에 사용됩니다. 대부분의 로봇은 고정되어 있지만 일부 로봇은 자재와 공급품을 전달하기 위해 작업장 전체를 이동합니다. 많은 사람들은 로봇을 공상과학이나 판타지 영화에서나 볼 수 있는 인간형 괴물로 생각한다. 언젠가 우리가 그러한 기계를 생산할 수 있는 기술적 능력을 갖게 될 수도 있지만 오늘날의 로봇은 실제로 매우 단순한 장치입니다. 예
라즈베리 파이 Raspberry Pi 로봇을 만드는 것이 까다롭고 복잡합니까? 당신은 올바른 위치에 있습니다. 실제로 로봇에 Pi 보드를 사용하면 저렴한 가격에 완전한 컴퓨터를 얻을 수 있습니다. 따라서 이를 소형 폼 팩터 및 광범위한 커뮤니티 지원과 결합하면 초보자에게도 훌륭한 보드가 될 것입니다. 그러나 로봇의 세계에 뛰어드는 것은 보다 발전된 회로 설계에 뛰어드는 것을 의미합니다. 하지만 걱정하지 마세요. 최대한 쉽게 만들어 드리겠습니다. https://www.wellpcb.com/ 따라서 이 기사에서는 Raspber