

제조공정

산업 제조
<시간 />
산업용 로봇은 어느 정도 인간의 움직임을 복제하는 기계 장치입니다. 인명에 대한 위험을 줄이거나, 인명보다 더 강한 강도나 정확도를 제공해야 하는 경우, 또는 지속적인 작동이 필요한 경우에 사용됩니다. 대부분의 로봇은 고정되어 있지만 일부 로봇은 자재와 공급품을 전달하기 위해 작업장 전체를 이동합니다.
많은 사람들은 로봇을 공상과학이나 판타지 영화에서나 볼 수 있는 인간형 괴물로 생각한다. 언젠가 우리가 그러한 기계를 생산할 수 있는 기술적 능력을 갖게 될 수도 있지만 오늘날의 로봇은 실제로 매우 단순한 장치입니다. 예를 들어 테이블에서 동전을 집는 것과 같이 당연하게 여기는 동작은 로봇에게 훨씬 더 어렵습니다. 우리의 뇌는 팔, 손목, 손 및 손가락이 동전을 만지고 쥐고 집도록 지시하기 위해 눈의 수천 가지 가변 비트 데이터를 처리합니다. 동전의 촉각조차도 우리의 두뇌를 지속적으로 업데이트하여 동전을 안전하게 쥐기에 충분한 손가락 압력을 제공합니다. 위치의 모든 변화는 우리 뇌에서 쉽게 보상됩니다. 동일한 작업을 수행하도록 산업용 로봇을 쉽고 경제적으로 프로그래밍하려면 이러한 많은 변수를 제한하거나 제거해야 합니다. 위치, 도달 범위, 무게 및 파악은 가능한 한 일관성을 유지하여 변동으로 인해 물체가 누락되거나 떨어지지 않도록 해야 합니다. 로봇을 제어하는 컴퓨터는 기계가 동작을 완료하도록 "가르치"도록 기술자가 프로그래밍해야 합니다. 로봇이 인간보다 더 잘 수행하는 영역은 정확성과 반복성입니다. 어떤 사람들은 매번 비슷한 동작으로 동전을 집는 반면 로봇은 지치지 않고 똑같은 동작으로 작업을 수행할 수 있다. 많은 로봇이 수천 분의 1인치의 정확도로 동작을 반복하고 하루 24시간 작동할 수 있습니다. 이러한 지칠 줄 모르는 정확한 작업으로 인해 로봇은 산업용 장비 구매의 점점 더 많은 부분을 차지하고 있습니다. 대부분은 반복적인 페인팅 및 용접 작업에 사용되는 반면 픽 앤 플레이스 로봇으로 알려진 다른 로봇은 제품을 들어 올려 기계와 패키지에 넣는 데 사용됩니다.
로봇 또는 "로봇"은 광범위한 자동화 과학의 한 부분입니다. 자동화는 다양한 작동 조건을 학습하거나 보상할 수 있는 기계와 컴퓨터를 사용합니다. 로봇이라는 용어는 체코어 robota, 에서 따온 것입니다. 강제 노동을 의미합니다. 이 용어는 1921년 연극 "R.U.R."에서 처음 등장했습니다. 체코의 극작가 카렐 차펙(Karel Capek)의 (Rossum's Universal Robots). 이 연극은 인간을 만든 사람을 파괴한 인간형 로봇을 묘사했습니다. 일부 현대 SF 스릴러의 줄거리와 거의 흡사합니다.
실용 로봇은 컴퓨터의 발달 이후 처음 시도되었다. 1960년대 후반, 스탠포드 연구소는 "SHAKEY"라는 실험용 로봇을 설계하고 제작했습니다. 텔레비전 카메라와 컴퓨터를 사용하여 이 기계는 블록을 이동하고 쌓을 수 있었습니다. General Motors는 1970년대 중반 Massachusetts Institute of Technology에서 조립용 자동화 로봇을 개발하는 프로그램에 자금을 지원했습니다. 여기에서 연구원 Victor Scheinman이 PUMA(Programmable Universal Manipulator for Assembly)를 발명하고 로봇이 미국 산업에 진출하기 시작했습니다.
로봇은 대부분 일반적인 재료로 만들어집니다. 클린룸 응용 프로그램, 우주 프로그램 또는 기타 "첨단 기술" 프로젝트를 위한 일부 특수 로봇은 티타늄 금속 및 탄소 섬유의 구조적 합성물을 사용할 수 있습니다. 작동 환경과 필요한 강도는 재료 선택의 주요 요소입니다.
강철, 주철, 그리고 알루미늄은 로봇의 팔과 베이스에 가장 많이 사용됩니다. 로봇이 움직일 수 있는 경우 일반적으로 고무 타이어를 장착하여 조용하게 작동하고 바닥을 확실히 잡을 수 있습니다. 로봇에는 상당한 양의 전자 장치와 배선이 포함되어 있으며 일부는 무선 또는 레이저로 제어됩니다. 실린더 및 기타 모션 생성 메커니즘에는 유압 오일 또는 압축 공기가 포함되어 있습니다. 실리콘, 고무 및 편조 스테인리스 스틸 호스는 이러한 메커니즘을 제어 밸브에 연결합니다. 로봇을 환경으로부터 보호하기 위해 노출된 일부 영역은 유연한 네오프렌 실드와 접을 수 있는 벨로우즈로 덮여 있습니다. 전기 모터 및 선형 드라이브는 컨트롤러 또는 "두뇌"와 함께 자동화 공급업체에서 구입합니다. 컨트롤러는 로봇의 작업 영역 근처에 위치한 강철 전기 캐비닛에 보관되거나 로봇 자체에 탑재됩니다.
대부분의 제조업체는 응용 프로그램의 특정 요구 사항을 충족하기 위해 수정 및 액세서리를 통합하는 기본 기계 설계를 가지고 있습니다.
 미국 업계에 최초로 설치된 로봇인 이 Unimate "픽앤플레이스" 유니) 최초 1961년 뉴저지주 트렌턴에 있는 GM 공장의 다이캐스팅 기계에서 뜨거운 금속 부품을 제거했습니다. (헨리 포드 박물관 및 그린필드 빌리지 컬렉션에서)
미국 업계에 최초로 설치된 로봇인 이 Unimate "픽앤플레이스" 유니) 최초 1961년 뉴저지주 트렌턴에 있는 GM 공장의 다이캐스팅 기계에서 뜨거운 금속 부품을 제거했습니다. (헨리 포드 박물관 및 그린필드 빌리지 컬렉션에서)
다른 도구와 마찬가지로 로봇은 그것을 휘두르는 사람만큼만 훌륭합니다. 그들은 하도록 설계되거나 프로그래밍되지 않은 작업을 수행할 수 없습니다. 전체 시스템과 프로세스가 신중하게 계획될 때 가장 효과적입니다. 또한 이를 담당하는 작업자도 충분히 교육을 받고 훈련을 받아야 합니다.
1980년대에 General Motors Corporation은 신기술에 400억 달러 이상, 로봇에 수억 달러를 지출했습니다. 불행히도 회사는 로봇이 혁신해야 하는 시스템과 프로세스를 이해하거나 로봇을 유지하고 운영해야 하는 사람을 이해하는 데 거의 충분한 비용을 지출하지 않았습니다. 미시간 주 햄트랙에 있는 GM 공장은 회사의 쇼케이스가 될 예정이었다. 대신, 1988년까지 이곳은 기술적 유토피아주의에서 최악의 장소가 되었습니다. 라인 위의 로봇들은 가끔 지나가는 차체보다 서로를 칠하기도 했다. 로봇은 때때로 통제 불능 상태가 되어 지나가는 차량과 충돌했습니다. 앞유리를 설치하도록 설계된 로봇이 유리창을 체계적으로 부수는 것으로 나타났습니다. 한번은 로봇이 작동을 멈췄을 때 기술자들이 고칠 방법을 몰랐습니다. 제조사에 급하게 전화를 걸어 기술자를 다음 비행기로 태웠습니다. 그는 로봇을 보고 "재설정" 버튼을 눌렀고 기계는 다시 작동했습니다.
윌리엄 S. 프레처
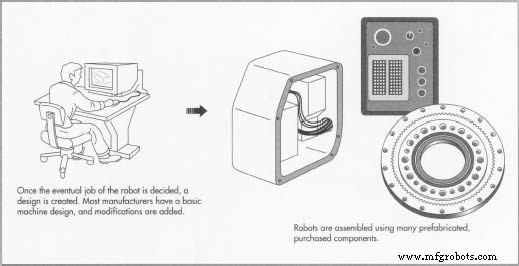 로봇이 넘어지는 것을 방지하기 위해 일반적으로 무겁습니다. 주조 또는 용접으로 만든 다음 기계로 가공합니다. 많은 로봇 제조업체는 로봇을 사용하여 새 부품을 용접합니다.
로봇이 넘어지는 것을 방지하기 위해 일반적으로 무겁습니다. 주조 또는 용접으로 만든 다음 기계로 가공합니다. 많은 로봇 제조업체는 로봇을 사용하여 새 부품을 용접합니다. 로봇의 나머지 부분과 짝을 이루는 영역은 부착 구성 요소의 적절한 맞춤과 작동을 보장하기 위해 정밀한 치수 제어로 가공됩니다. 마찬가지로, 주 기둥과 암은 최종 조립품에 정확하게 맞도록 구성됩니다.
로봇은 전기 모터, 유압 실린더, 베어링, 배선, 컨트롤러 및 기타 중요 부품과 같은 구매한 부품을 상당량 사용하여 조립됩니다. 산업용 로봇은 2,000개의 개별 부품을 포함할 수 있으며 팀으로 조립됩니다. 이 팀은 베이스에서 시작하여 로봇이 완성되어 테스트 및 마무리 준비가 될 때까지 구성 요소를 로봇에 조립합니다.
조립 프로세스를 시작하기 위해 모바일 로봇에는 먼저 트랙션 모터, 배터리, 차축, 바퀴 및 타이어가 장착되어 있습니다. 고정 로봇에는 이러한 항목이 필요하지 않습니다. 조립 중 안정성을 위해 임시로 바닥에 볼트로 고정됩니다. 움직이는 기둥과 암은 각각의 구동 모터로 하위 조립된 다음 베이스에 부착됩니다. 베이스에는 회전 동작을 제공하기 위해 모터로 구동되는 링 기어가 있습니다. 기둥에 포함된 구동 기어와 밀접하게 결합되어야 합니다. 스러스트 베어링은 베이스에 있는 기둥과 암의 무게를 지지합니다. 자기 스케일이 베어링을 둘러싸고 컨트롤러에 전자 위치 피드백을 제공합니다.
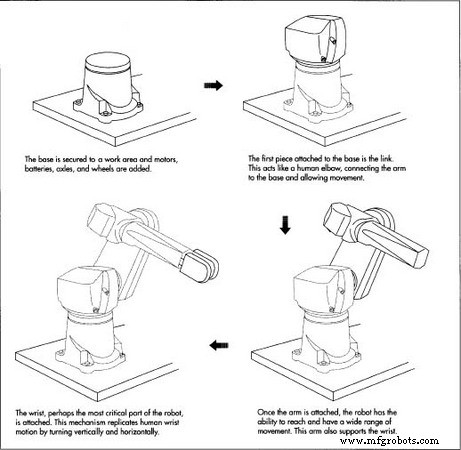 산업용 로봇은 2,000개의 개별 부품을 포함할 수 있으며 팀으로 조립됩니다. 이 팀은 베이스에서 시작하여 로봇이 완성되어 테스트 및 마무리 준비가 될 때까지 구성 요소를 로봇에 조립합니다. 구동축에 연결됩니다. 암과 링크 조인트는 손목의 전체 하중을 견뎌야 하므로 대형 베어링과 피벗 핀을 사용하면 됩니다.
산업용 로봇은 2,000개의 개별 부품을 포함할 수 있으며 팀으로 조립됩니다. 이 팀은 베이스에서 시작하여 로봇이 완성되어 테스트 및 마무리 준비가 될 때까지 구성 요소를 로봇에 조립합니다. 구동축에 연결됩니다. 암과 링크 조인트는 손목의 전체 하중을 견뎌야 하므로 대형 베어링과 피벗 핀을 사용하면 됩니다. 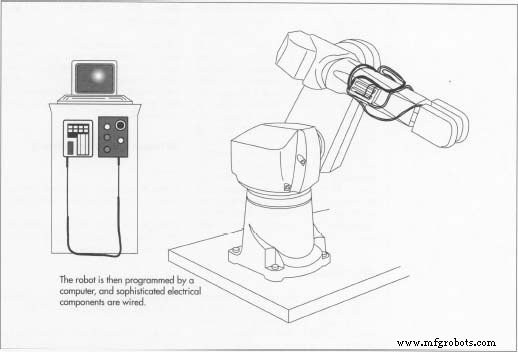 모터의 센서와 전기 부품에는 전원을 공급하고 제어 컴퓨터에 정보를 다시 전달하기 위한 전선이 있어야 합니다. 때때로 암과 베이스의 미사용 공간은 일부 컨트롤러 전자 장치를 장착할 수 있는 편리한 장소를 제공하여 배선 경로를 단축시킵니다. 유압 및 공기 실린더에는 베이스의 밸브에서 제어되는 작동 압력을 전달하는 호스가 있습니다. 이러한 와이어와 호스의 대부분은 이동 로봇의 경우 베이스에 부착되는 컨트롤러 캐비닛으로 다시 라우팅됩니다. 로봇이 고정되어 있는 경우 이 컨트롤러는 일반적으로 몇 피트 떨어진 곳에 장착되며 탯줄로 연결됩니다. 조립 후 로봇의 팔과 기둥은 페인트 스프레이, 용접 스파크 또는 환경의 기타 위험으로부터 보호하기 위해 가드와 실드로 덮여 있습니다.
모터의 센서와 전기 부품에는 전원을 공급하고 제어 컴퓨터에 정보를 다시 전달하기 위한 전선이 있어야 합니다. 때때로 암과 베이스의 미사용 공간은 일부 컨트롤러 전자 장치를 장착할 수 있는 편리한 장소를 제공하여 배선 경로를 단축시킵니다. 유압 및 공기 실린더에는 베이스의 밸브에서 제어되는 작동 압력을 전달하는 호스가 있습니다. 이러한 와이어와 호스의 대부분은 이동 로봇의 경우 베이스에 부착되는 컨트롤러 캐비닛으로 다시 라우팅됩니다. 로봇이 고정되어 있는 경우 이 컨트롤러는 일반적으로 몇 피트 떨어진 곳에 장착되며 탯줄로 연결됩니다. 조립 후 로봇의 팔과 기둥은 페인트 스프레이, 용접 스파크 또는 환경의 기타 위험으로부터 보호하기 위해 가드와 실드로 덮여 있습니다. 설치는 사용자의 사이트에서 발생합니다. 고정되어 있는 경우 로봇은 볼트로 바닥에 고정됩니다. 움직이는 경우 로봇이 작업을 따라갈 수 있도록 가이드 와이어가 바닥에 묻혀 있습니다. 무선 신호에 의해 유선을 따르고 또한 유선을 사용하여 중앙 컨트롤러와 통신합니다. 최근에는 와이어를 제거하기 위해 레이저가 사용되었습니다. 로봇은 벽에서 반사된 레이저 빔에 의해 경로를 따라 안내됩니다. 일부 디자인에는 비디오 카메라도 포함됩니다. 고정 응용 프로그램은 일반적으로 의심하지 않는 사람이 로봇의 작업 영역에 들어가 부상을 당하지 않도록 로봇 주위에 울타리를 구성해야 합니다. 설치 후 로봇 제조업체는 일반적으로 고객에게 작동 및 유지 보수 교육을 제공합니다.
테스트는 기능적 정확성과 "번인(burn-in)"으로 알려진 프로세스의 두 부분으로 구성됩니다. 조립된 로봇에 전원이 공급되면 컴퓨터 프로그램은 컨트롤러에 일련의 동작을 통해 로봇 팔을 움직이도록 지시합니다. 이러한 동작을 정확하게 기록하고 모든 문제를 수정합니다. 그런 다음 로봇은 몇 시간 동안 계속 작동됩니다. 이를 번인(burn-in)이라고 하며 두 가지 기능을 합니다. 첫째, 기능 테스트의 데이터를 사용하여 정확도 손실을 감지할 수 있습니다. 이러한 경우는 설계 문제, 느슨한 조립, 결함 있는 베어링 등을 나타냅니다. 둘째, 시운전을 통해 전자 장치와 유압 장치를 작동 온도로 끌어올립니다. 이는 컨트롤러가 오프셋이라고 하는 수정 계수로 프로그래밍되어 있기 때문에 중요합니다. 이러한 오프셋은 위치 센서의 피드백을 보상하여 구성 요소의 온도 변화를 허용합니다. 기계가 예열된 상태에서 프로그래머는 최적의 성능을 제공하기 위해 수정 요소를 프로그램에 넣을 수 있습니다.
로봇 공학은 산업 기계 시장에서 가장 빠르게 성장하는 부문 중 하나입니다. 주로 컴퓨터 기술의 발전에 힘입어 구형 로봇은 새로운 모델에 의해 빠르게 쓸모 없게 됩니다. 일본 회사는 로봇 개발을 주도하고 있으며, 많은 설계에 로봇이 스스로 작업을 "학습"하고 "적응"할 수 있도록 하는 인공 지능의 새로운 과학이 통합되어 있습니다.
카메라와 전자 비전의 발전은 1990년대 로봇에도 영향을 미칠 것입니다. 많은 로봇이 의료 및 식품 서비스와 같은 새로운 사용 영역에 진입하여 이전에 산업 작업장에서 발생했던 것보다 더 많은 사람들이 로봇과 접촉하게 될 것입니다.
제조공정
Fanuc이 다시 친환경으로 가고 있습니다! Fanuc은 현재 시장을 주도하고 있는 것에 발맞춰 혁신하고 보조를 맞추는 놀라운 일을 해왔습니다. 이것은 최근 CR-35iA 로봇이 로봇의 힘과 작업자의 유연성을 결합하는 아름다움을 쉽게 세계에 보여주기 위해 가장 크고 강력한 협동로봇으로 보여졌습니다. 35kg의 페이로드를 운반하는 이 로봇은 다양한 산업 분야에서 엄청난 관심을 끌었습니다. 그래서 Fanuc은 다음 논리적인 결정을 내렸습니다. 그들은 역학이 회사의 LR Mate 시리즈(LR Mate 200iD)와 일치하는 낮은 페이
로봇은 휴식이나 우리 모두가 꿈꾸는 추가 수면 없이 1년 52주 동안 하루 24시간, 주 7일 일할 수 있습니다. 우리가 준비가 되어 있든 그렇지 않든, 일광 절약 시간제(Daylight Savings Time)가 생겨났고 우리는 가장 신성한 상품 중 하나인 시간의 가치를 상기하게 되었습니다. 다행스럽게도 로봇은 일광 절약 시간제에 영향을 받지 않으며 추가 수면 시간을 꿈꾸는 우리 인간보다 훨씬 더 효율적으로 작업을 계속 수행할 것입니다. 그들은 가장 귀중한 상품인 시간 절약을 포함하여 생산 라인에서 수많은 혜택을 계속 제공할