

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
헤이 가이즈...
이 대유행에서 모두가 집에서 안전하게 지내고 있다고 믿습니다.
Human Follow Bot이라는 새로운 프로젝트를 만들었습니다.
이 프로젝트를 집에서 만들려면 전체 비디오를 시청하세요.
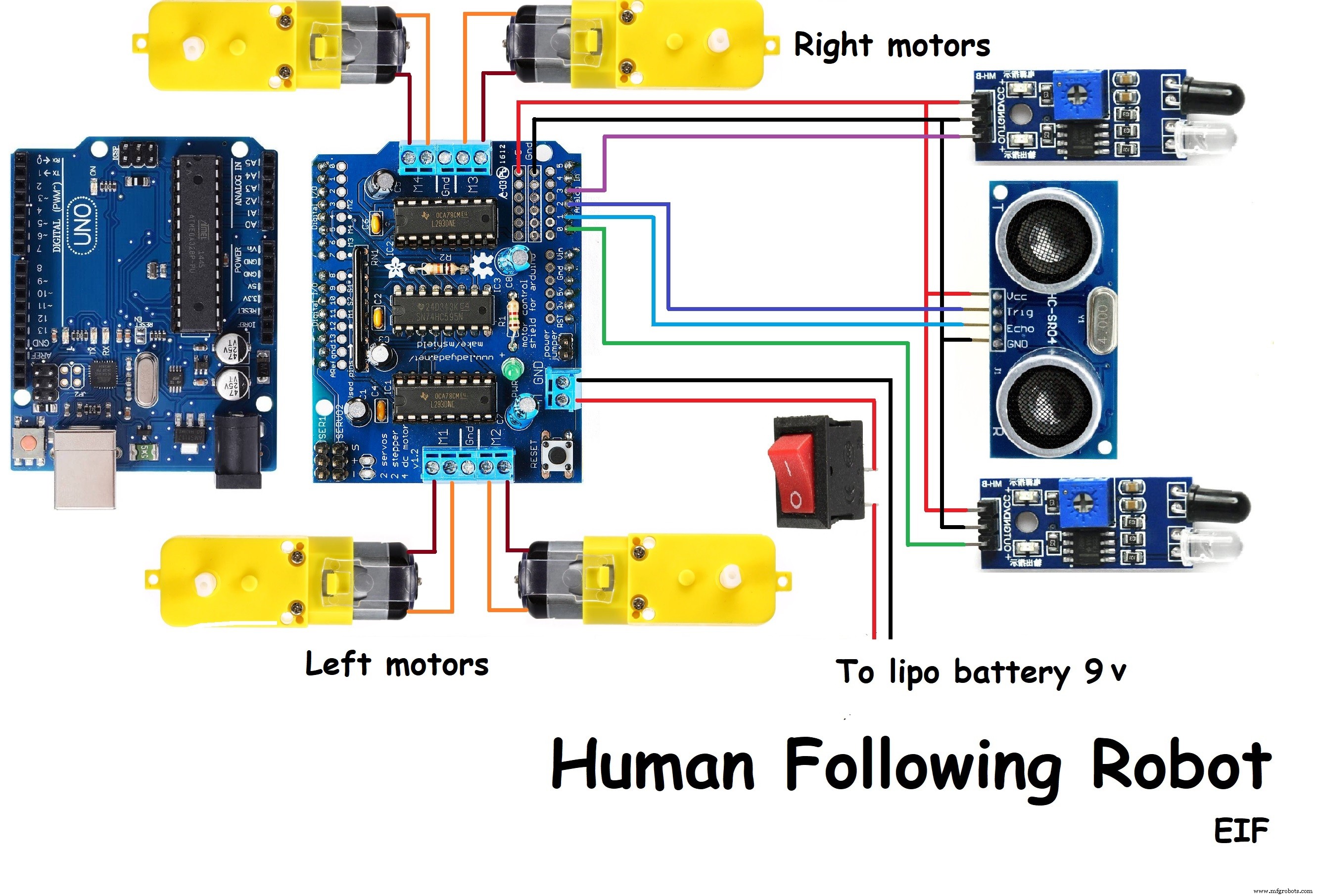
그것은 2개의 IR 센서와 초음파 센서를 사용했습니다. IR 센서는 사람이나 물체를 따라가는데 사용하고 초음파 센서는 로봇을 뒤로 이동하는 데 사용됩니다.
이 프로젝트가 마음에 든다면 존중하십시오.
개선할 수 있도록 제안이나 내 YouTube 채널에 제공하고 싶은 피드백을 주십시오.
링크:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
또한 "내가 만든 다음 프로젝트는?"에 대한 제안을 줄 수 있습니다.
이 프로젝트를 만드는 단계:
1. Arduino, 바퀴가 있는 DC 기어드 모터, 2개의 IR 센서, 초음파 센서, 서보 모터, 판지, l293d 모터 드라이버 실드, 배터리 9v, 스위치, 점퍼 와이어 등과 같은 구성 요소를 수집합니다.
2. 판지를 가지고 바퀴가 달린 모터 4개를 모두 넣어 자동차를 만드세요.
3. IR 센서를 차량에 배치합니다.
4. 자동차에 서보 모터를 붙입니다.
5. 초음파 센서를 상자에 넣고 핸들을 추가한 후 서보 모터에 연결합니다.
6. 자동차에 arduino와 l293d 모터 실드를 연결합니다.
7. 회로도와 같이 결선하십시오.
8. 코드를 업로드하고 배터리가 있는 스위치를 l293d 모터 드라이버 실드에 연결합니다.
IR 센서의 감도를 조정합니다.
프로젝트가 준비되었습니다...!!!
내 YouTube 채널을 한 번 방문하여 더 흥미로운 프로젝트를 확인하세요.
"전자제품은 재미있습니다"
제 채널이 마음에 드셨다면 구독 부탁드립니다.
링크:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0#define echopin A1 // echo pin#define trigpin A2 // 트리거 핀 #define RIGHT A3AF_DCMotor Motor1(1,MOTOR12_1KHZ);AF_DCMotor Motor2(2,MOTOR12_1KHZ);AF_DCMotor Motor3(3,MOTOR34_1KHZ);AF_DCMotor Motor4(4,MOTOR34_1KHZ);서보 myservo; int pos =0;오랜 시간; 무효 설정(){Serial.begin(9600);myservo.attach(10);for(pos =90; pos <=180; pos +=1){myservo.write(pos);delay(15);} for(pos =180; pos>=0; pos-=1) {myservo.write(pos);delay(15);}for(pos =0; pos<=90; pos + =1) {myservo.write(pos);delay(15);}pinMode(RIGHT, INPUT);pinMode(LEFT, INPUT);pinMode(trigpin, OUTPUT);pinMode(echopin, INPUT);}void 루프() {unsigned int distance =read_cm();int Right_Value =digitalRead(RIGHT);int Left_Value =digitalRead(LEFT);Serial.print("R=");Serial.print(Right_Value);Serial.print(" L=" );Serial.print(Left_Value);Serial.print(" D=");Serial.println(거리); if((Right_Value==1) &&(거리>=10 &&거리<=30)&&(Left_Value==1)){forword();}else if((Right_Value==0) &&(Left_Value==1) ){turnRight();}else if((Right_Value==1) &&(Left_Value==0){turnLeft();}else if((Right_Value==1) &&(Left_Value==1)){stop( );}else if(distance> 5 &&distance <10){stop();}else if(distance <5){backword();}delay(50);}long read_cm(){ digitalWrite(trigpin, LOW); 지연 마이크로초(2); 디지털 쓰기(트리거핀, 높음); 지연마이크로초(10); 시간 =pulseIn(에코핀, HIGH); 반환 시간 / 29 / 2;}forword() 무효{// 앞으로 켭니다Motor1.setSpeed(120);Motor1.run(FORWARD);Motor2.setSpeed(120);Motor2.run(FORWARD);Motor3.setSpeed (120);Motor3.run(FORWARD);Motor4.setSpeed(120);Motor4.run(FORWARD);}void backword(){ // 반대 wayMotor1.setSpeed(120);Motor1.run(BACKWARD); Motor2.setSpeed(120);Motor2.run(BACKWARD);Motor3.setSpeed(120);Motor3.run(BACKWARD); Motor4.setSpeed(120);Motor4.run(뒤로); }void turnRight(){ // 다른 rightMotor1.setSpeed(200);Motor1.run(FORWARD);Motor2.setSpeed(200);Motor2.run(FORWARD);Motor3.setSpeed(100);Motor3.run(BACKWARD );Motor4.setSpeed(100);Motor4.run(BACKWARD);}void turnLeft(){ // 왼쪽으로 가도록 켭니다.Motor1.setSpeed(100);Motor1.run(BACKWARD);Motor2.setSpeed(100);Motor2 .run(BACKWARD);Motor3.setSpeed(200);Motor3.run(FORWARD);Motor4.setSpeed(200);Motor4.run(FORWARD);}void stop(){ // stopMotor1.setSpeed(0); Motor1.run(RELEASE);Motor2.setSpeed(0);Motor2.run(RELEASE);Motor3.setSpeed(0);Motor3.run(RELEASE);Motor4.setSpeed(0);Motor4.run(RELEASE); }
제조공정
구성품 및 소모품 SparkFun 듀얼 H-Bridge 모터 드라이버 L298 × 1 DC 모터(일반) × 4 Arduino UNO × 1 LED(일반) × 8 저항 221옴 × 8 서보(타워 프로 MG996R) × 1 초음파 센서 - HC-SR04(일반) × 1 앱 및 온라인 서비스 Arduino IDE Microsoft Visual Studio 2015
구성품 및 소모품 초음파 센서 - HC-SR04(일반) × 2 Arduino Nano R3 × 1 포토 저항기 × 1 Maxim 통합 8x8 LED 매트릭스 MAX7219 × 2 납땜 브레드보드 절반 크기 × 1 점퍼 와이어(일반) × 1 저항 330옴 × 1 앱 및 온라인 서비스 Arduino IDE 이 프로젝트 정보 저는 8x8 매트릭스 LED와