

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
이전에 단극형 스테퍼 모터용 Arduino 라이브러리를 제공했습니다. 단극형 스테퍼 모터의 속도, 방향, 회전수, 모터 각도 등 모든 파라미터를 완벽하게 제어합니다. 단, 단극형 스테퍼 모터 전용이었습니다. 우리가 알다시피 스테퍼 모터는 양극성 유형일 수도 있습니다. 그러나 이 라이브러리는 바이폴라형 스테퍼 모터를 제어할 수 없습니다. 그래서 바이폴라 타입 스테퍼 모터를 제어하기 위해 또 다른 arduino 라이브러리를 개발하기로 결정했습니다.
그래서 여기에서는 모든 바이폴라형 스테퍼 모터를 위한 아두이노의 바이폴라 스테퍼 모터 라이브러리를 소개합니다. 라이브러리에는 요구 사항에 따라 모터를 회전하고 제어하는 데 사용할 수 있는 9가지 다른 기능이 있습니다. 라이브러리는 산업용 모션 제어에 따라 설계되었습니다. 요구 사항. 다음은 이 라이브러리의 일부 기능입니다.
1. 모든 바이폴라 스테퍼 모터 제어
2. 모터 회전 방향 제어
3. 1, 2, 3, 4, ..... 와 같은 모터의 회전 수를 정확하게 제어합니다.
4. 95% 정확도로 모터 속도를 RPM 단위로 정확하게 제어합니다.
5. 80-100% 정확도로 모터를 0 - 360o 사이에서 원하는 각도로 정확하게 회전시킵니다.
6. 모든 arduino 보드와 호환
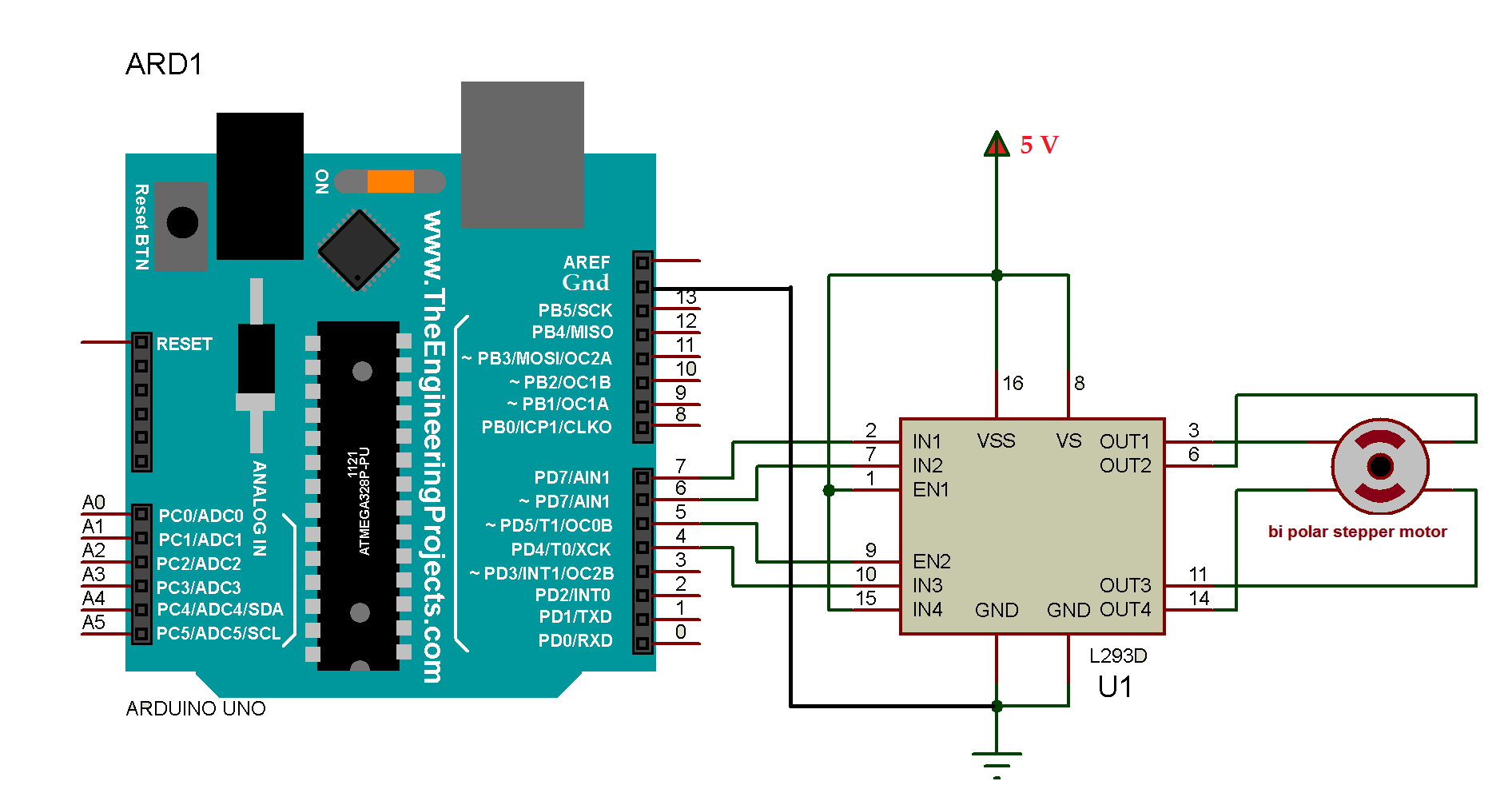
모든 라이브러리 기능에 대한 간략한 설명이 여기에 나와 있습니다. 이 라이브러리를 사용하여 모터를 제어하는 방법을 설명하는 몇 가지 예가 나중에 제공됩니다. 이러한 예의 데모를 보여주는 하나의 비디오도 제공됩니다. 마지막으로 바이폴라 스테퍼 모터 뿐만 아니라 DC 모터용 H-브리지 드라이버로 널리 사용되는 L293D 칩을 사용하는 회로를 제안한다.
arduino 스케치에서 이 라이브러리를 사용하려면 bi_polar_Stepper 폴더를 C:\arduino-1.6.7\libraries와 같은 arduino 라이브러리 폴더의 루트 디렉토리에 넣습니다.
라이브러리 기능 설명:
1) bi_polar_Stepper(intpin1, int pin2, int pin3, int pin4) - 이것은 스테퍼 모터 드라이버 핀이 있는 arduino 스케치에 bi_polar_Stepper 인스턴스를 생성합니다. 스테퍼 모터를 구동하는 데 사용되는 arduino 보드 핀을 지정해야 함을 의미합니다.
2) set_step_per_rev(intsteps)- 이 기능은 스테퍼 모터가 1회전을 완료하는 데 필요한 단계 수를 설정합니다. 모터의 스텝 각도(스텝 분해능)를 설정한다는 의미입니다. 정확한 제어를 위해서는 모터의 스텝각을 입력해야 합니다.
3) set_RPM(int rpm) – 이 기능은 모터의 속도를 RPM으로 설정하고 모터는 최대 95% 정확도로 선택된 속도로 회전합니다.
4) rotate_CW() - 이 기능은 모터를 시계 방향으로 회전시키기 시작합니다. 모터를 시계 방향으로 계속 회전하려면 연속 루프에서 이 기능을 사용해야 합니다.
5) rotate_CCW() - 이 기능은 모터를 시계 반대 방향으로 회전시키기 시작합니다. 모터를 시계 반대 방향으로 계속 회전하려면 이 기능을 연속 루프에서 사용해야 합니다.
6) 회전(int dir)- 이 기능은 선택한 방향으로 모터를 회전시킵니다. 방향을 1로 지정하면 모터가 시계 방향으로 회전하고 그 반대도 마찬가지입니다.
7) rotate_one_rev(intdir)- 이 기능은 모터를 선택한 방향으로 정확히 1회전 회전시킵니다.
8) rotate_n_rev(int dir, intnum)- 이 기능은 모터를 선택한 방향으로 필요한 회전 수만큼 회전시킵니다.
9) rotate_x_deg(int deg) – 이 기능은 80 –100% 각도 정확도로 어느 방향으로든 0 – 360o의 원하는 각도로 모터를 회전시킵니다.
예:
1) 모터를 60RPM으로 임의의 방향으로 연속 회전
/*이 프로그램은 바이폴라 스테퍼 모터를 지속적으로 회전시킵니다.
* 60RPM에서 1.8도 스텝 각도(회전당 200단계)
* 2016년 12월 12일 Ashutosh Bhatt 작성
*/
#include
#define steps 200 // 모터별로 이 단계를 변경합니다.
bi_polar_Stepper my_step_motor(8, 9, 10, 11);
정수 rpm =60;
무효 설정()
{
// 여기에 설정 코드를 넣어 한 번만 실행합니다.
Serial.begin(9600);
Serial.println("바이폴라 스테퍼 모터 라이브러리 테스트 프로그램");
my_step_motor.set_step_per_rev(단계);
my_step_motor.set_RPM(rpm);
Serial.println("모터가 시계 방향으로 회전합니다.");
}
무효 루프()
{
my_step_motor.rotate_CW();
}
2) 모터를 시계 방향으로 1회전, 반시계 방향으로 1회전 연속 회전
/*이 프로그램은 바이폴라 스테퍼 모터를 회전시킵니다.
* 1.8도 단계 각도(200단계/회전)
* 시계 방향(CW) 1회전 및 1회전
* 30RPM에서 시계 반대 방향(CCW) 연속
* 2016년 12월 12일 Ashutosh Bhatt 작성
*/
#include
#define 단계 200
bi_polar_Stepper my_step_motor(8, 9, 10, 11);
정수 rpm =30;
무효 설정()
{
// 여기에 설정 코드를 넣어 한 번만 실행합니다.
Serial.begin(9600);
Serial.println("Ashutosh Bhatt가 만든 양극 스테퍼 모터 라이브러리 테스트 프로그램");
my_step_motor.set_step_per_rev(단계);
my_step_motor.set_RPM(rpm);
}
무효 루프()
{
Serial.println("모터가 시계 방향으로 회전합니다.");
my_step_motor.rotate_one_rev(1);
지연(1000);
Serial.println("모터가 시계 반대 방향으로 회전합니다.");
my_step_motor.rotate_one_rev(0);
지연(1000);
}
3) 모터를 100RPM에서 시계 방향으로, 50RPM에서 시계 반대 방향으로 계속 회전
/*이 프로그램은 먼저 바이폴라 스테퍼 모터를 회전시킵니다.
* 1.8도 단계 각도(200단계/회전)
* 시계방향(CW) 100RPM에서 2회전 후
* 50RPM에서 2회전 동안 시계 반대 방향(CCW)
*지속적으로
* 2016년 12월 12일 Ashutosh Bhatt 작성
*/
#include
#define 단계 200
bi_polar_Stepper my_step_motor(2, 3, 4, 5);
정수 i;
무효 설정()
{
Serial.begin(9600);
Serial.println("Ashutosh Bhatt가 만든 바이폴라 스테퍼 모터 라이브러리 테스트 프로그램");
my_step_motor.set_step_per_rev(단계);
}
무효 루프()
{
my_step_motor.set_RPM(100);
for(i=0;i<100;i++) my_step_motor.rotate(1);
지연(2000);
my_step_motor.set_RPM(50);
for(i=0;i<100;i++) my_step_motor.rotate(0);
지연(2000);
}
4) 모터를 20RPM에서 시계 방향으로 4회전, 10RPM에서 시계 반대 방향으로 2회전 연속 회전
/*이 프로그램은 먼저 바이폴라 스테퍼 모터를 회전시킵니다.
* 1.8도 단계 각도(200단계/회전)
* 20RPM에서 시계 방향(CW)으로 4회전 후
* 10RPM에서 시계 반대 방향(CCW)으로 2회전
*지속적으로
* 2016년 12월 12일 Ashutosh Bhatt 작성
*/
#include
#define 단계 200
bi_polar_Stepper my_step_motor(2, 3, 4, 5);
정수 i;
무효 설정()
{
Serial.begin(9600);
Serial.println("Ashutosh Bhatt가 만든 단극 스테퍼 모터 라이브러리 테스트 프로그램");
my_step_motor.set_step_per_rev(단계);
}
무효 루프()
{
my_step_motor.set_RPM(20);
my_step_motor.rotate_n_rev(1, 4);
지연(2000);
my_step_motor.set_RPM(10);
my_step_motor.rotate_n_rev(0, 2);
지연(2000);
}
5) 30RPM에서 모터를 시계 방향으로 90o, 시계 반대 방향으로 계속 90o 회전
/*이 프로그램은 바이폴라 모터를 회전시킵니다.
* 30RPM에서 1.8도 스텝 각도(200단계/회전)에서
* 90도 CW 및 90도 CCW 연속
* 22/10/16에 Ashutosh Bhatt가 작성했습니다.
*/
#include
#define motor_steps 200
bi_polar_Stepper my_step_motor(8, 9, 10, 11);
정수 rpm =30;
무효 설정()
{
// 여기에 설정 코드를 넣어 한 번만 실행합니다.
Serial.begin(9600);
Serial.println("바이폴라 스테퍼 모터 라이브러리 테스트 프로그램");
my_step_motor.set_step_per_rev(motor_steps);
my_step_motor.set_RPM(rpm);
Serial.println("모터가 앞뒤로 90도 회전합니다.");
}
무효 루프()
{
my_step_motor.rotate_x_deg(90);
지연(2000);
my_step_motor.rotate_x_deg(270);
지연(2000);
}
참고:-스테퍼 모터가 더 높은 전류 및 전압 정격인 경우 L293D 칩 대신 L298 칩을 사용하거나 TIP122, TIP142 등과 같은 4개의 개별 Darlington 트랜지스터 세트를 사용하여 스테퍼 모터를 구동할 수 있습니다.
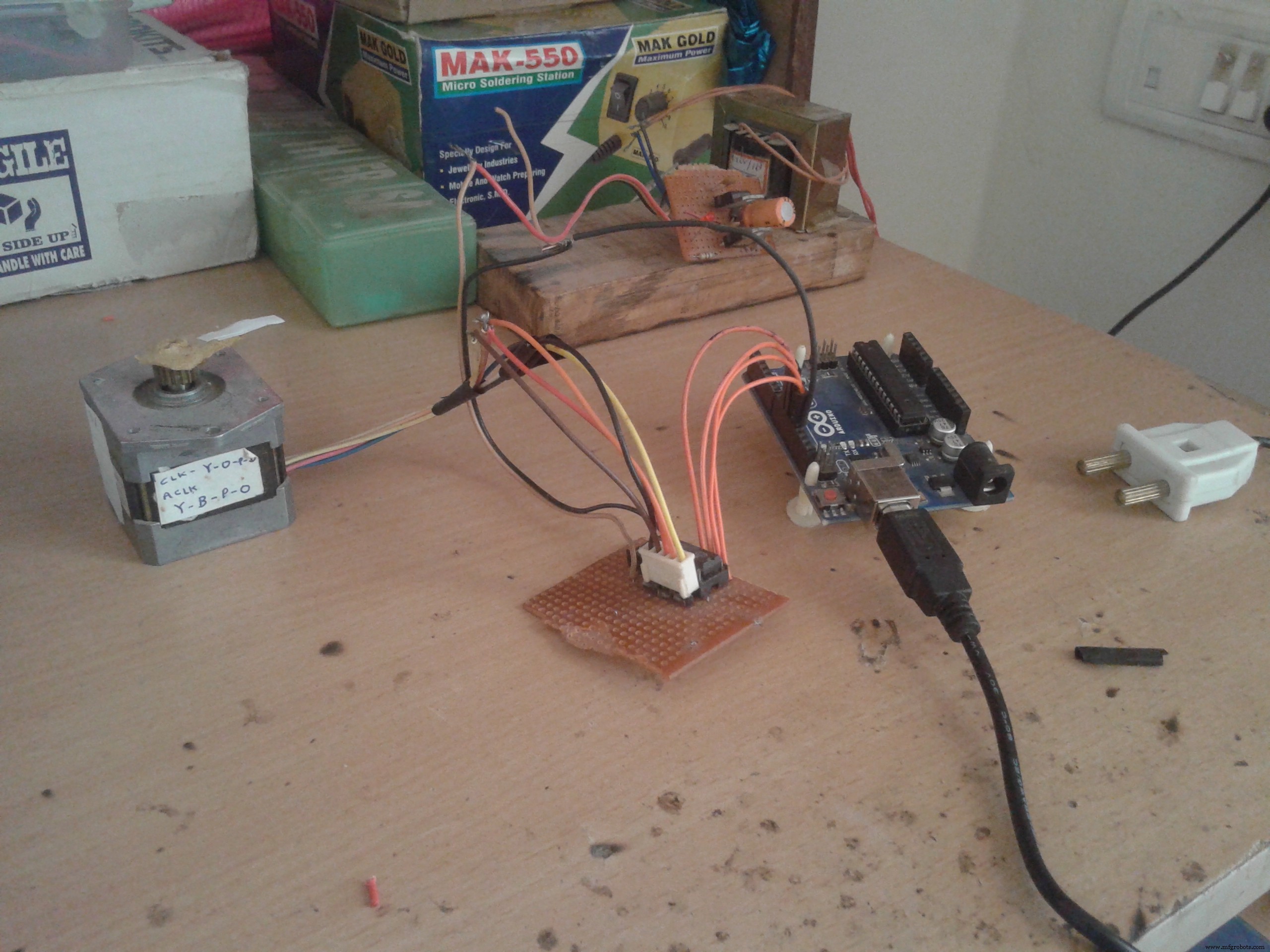
위의 회로와 함께 주어진 라이브러리 및 예제 프로그램은 다음 스테퍼 모터로 테스트됩니다.
1) 5V, 100RPM(MAX), 200단계/회전(1.8o 단계 각도)의 2상 바이폴라 모터
2) 5V, 60RPM(MAX), 200단계/회전(1.8o 단계 각도)의 2상 바이폴라 모터
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">미리보기 없음(다운로드만 가능)
제조공정
스테퍼 모터 수리를 위해 회사를 선택하는 방법을 알려드리겠습니다. 스테퍼 모터란 무엇인가요? 스테퍼 모터는 전기 펄스의 변환에서 기계적인 움직임을 달성하는 전기 기계 장치입니다. 지속적으로 인가되는 전압이 아니라 디지털 펄스에 의해 구동됩니다. 지속적으로 회전하는 기존의 전기 모터와 달리 스테퍼 모터는 고정된 각도 증분으로 작은 단계로 회전합니다. 또한 위치 제어를 유지하기 위해 피드백이 필요한 서보 모터와 달리 스테퍼 모터는 디지털 명령을 따릅니다. 스테퍼 모터의 응용 스테퍼 모터는 위치 제어를 위한 많은 응용 분야에서 사
Sherline CNC 시스템 구성 요소 및 연결. 시스템 구성요소 1) 1-5/8″ 수동 핸드휠2) Z축 스테퍼 모터3) 스테퍼 모터 마운트4) 표준 액세서리가 있는 Sherline 수직 밀(그림은 모델 2000 밀)5) 백업 Linux/EMC2 설치 CD, Sherline 지침 CD6) Y축 스테퍼 모터7) X축 스테퍼 모터8) 선택적 A축용 케이블(CNC) 회전 테이블) 연결9) 키보드 및 마우스가 있는 컴퓨터10) 스테퍼 모터 전원 공급 장치용 켜기/끄기 스위치11) USB 드라이브 포트(전면)12) CD -RW 드라이