

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
| |||
|
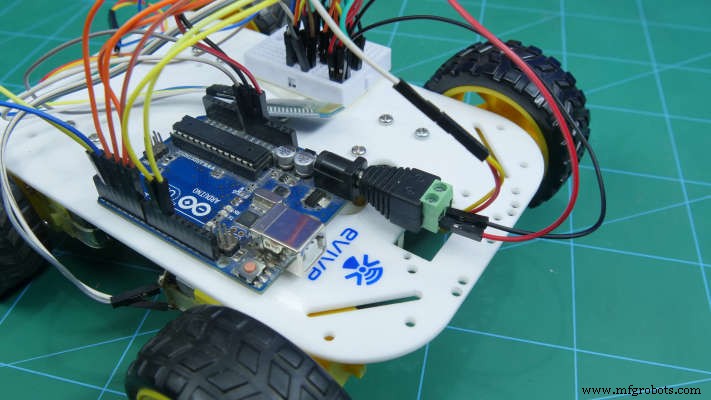
또 다른 프로젝트, 다른 즉시 사용 가능한 선물 아이디어! 우리가 자체 개발한 모바일 애플리케이션인 Dabble을 사용하여 Bluetooth를 통해 제어할 수 있는 간단하고 재미있는 조립 로봇인 Dabble 제어 4륜 로봇을 소개합니다. 로봇을 만드는 데 필요한 것은 Arduino Uno 보드, 섀시, 바퀴, 모터 샤프트 및 기타 액세서리와 도구뿐입니다. 그것을 제어하려면 Google Play에서 Dabble을 설치하고 Bluetooth와 페어링해야 합니다. 로봇이 원하는 곳으로 이동할 준비가 되었습니다!
처음 시작했던 DIY 정신으로 한 해를 마무리하는 이보다 더 좋은 방법은 없을까요? 그래서 당신은 무엇을 기다리고 있습니다!
자, 시작하겠습니다!
1단계:필요한 것
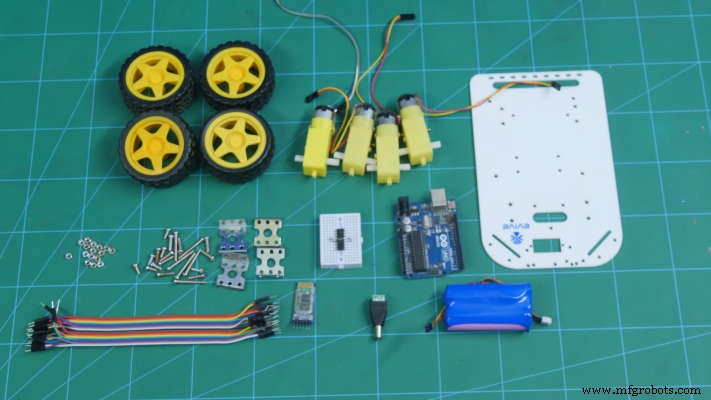 <울>
<울>
2단계:몸 만들기
먼저 4륜 로봇의 몸체를 만들기 시작합니다.
섀시를 잡고 거꾸로 뒤집습니다.

이 섀시에 M3 볼트와 너트를 사용하여 4개의 모터 마운트를 장착합니다.
DC 모터를 고정하고 M2 너트와 볼트를 사용하여 모터 마운트에 고정합니다.
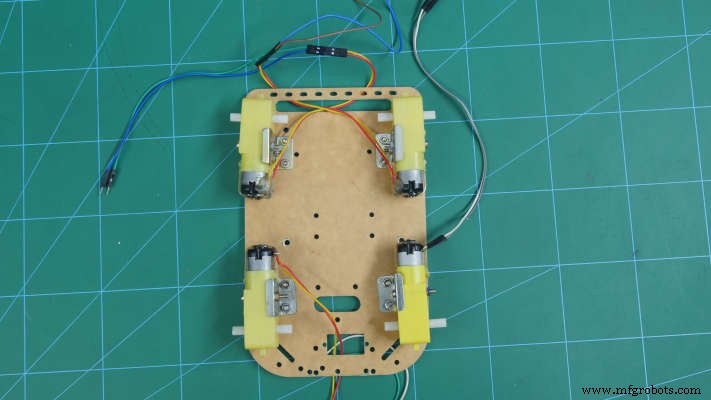
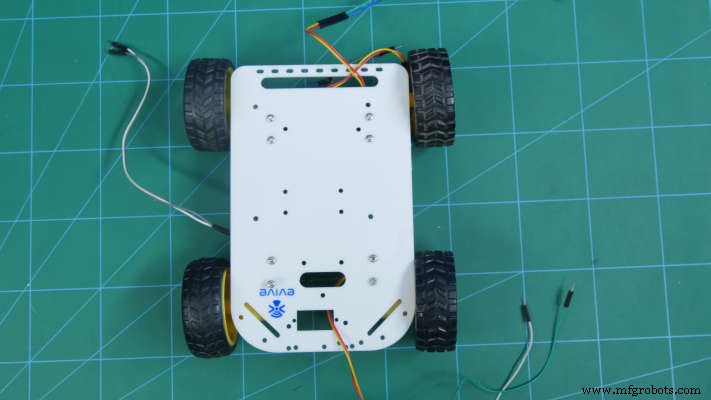
DC 모터의 각 축에 바퀴를 부착합니다.

어셈블리를 뒤집으면 몸이 만들어집니다.
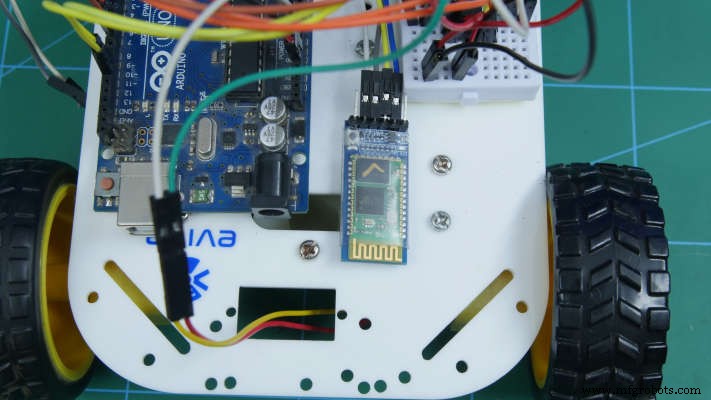
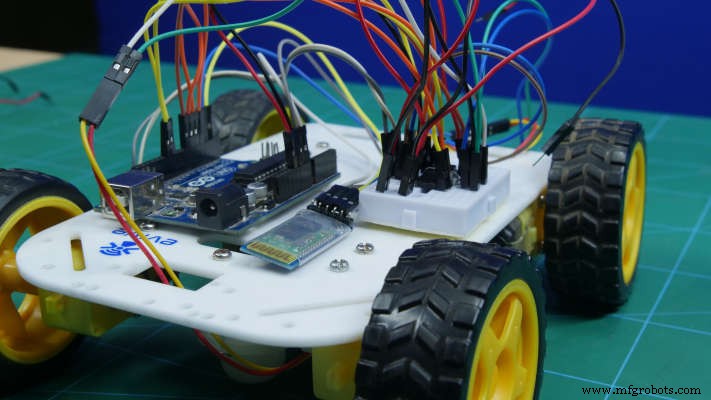
3단계:두뇌 추가
우리가 사용할 마이크로컨트롤러는 Arduino Uno입니다.

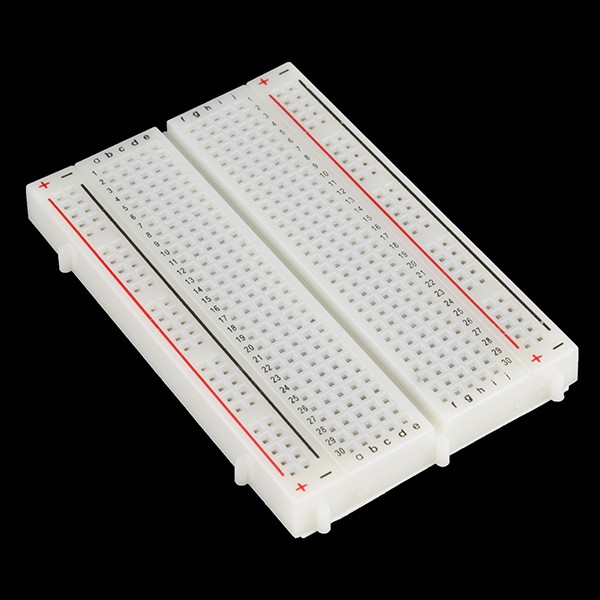
우리는 그것에 대한 모든 연결을 만들 것이지만 연결을 만들기 위해 브레드보드도 사용할 것입니다.
4단계:모터 드라이버 연결 및 사용
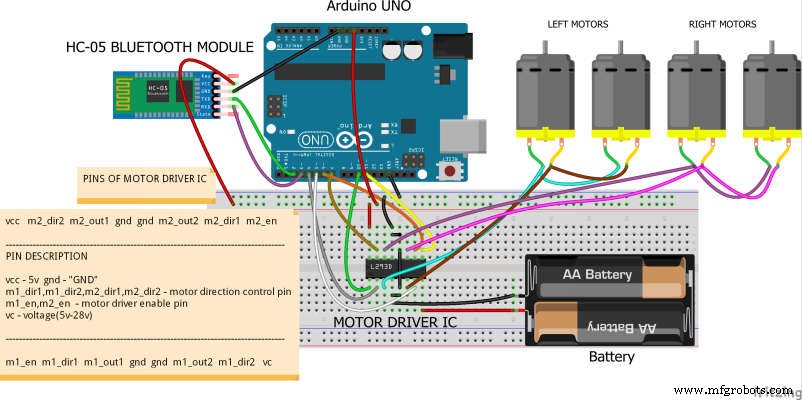
아래 그림과 같이 연결합니다.
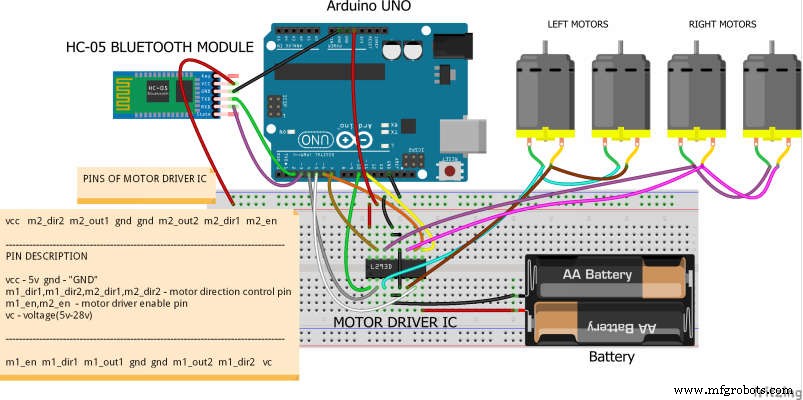
Arduino Uno는 4개의 모터를 구동하기에 충분한 전력을 제공하지 않기 때문에 우리는 모터 드라이버를 사용할 것입니다. 따라서 모터 드라이버를 추가하여 로봇에 필요한 에너지를 제공할 수 있습니다.
왼쪽 두 개의 모터는 병렬로 연결됩니다. 마찬가지로 오른쪽 두 개의 모터가 너무 병렬로 연결되어 있습니다. 연결은 다음과 같이 이루어집니다.
<울>
5단계:스마트폰 연결
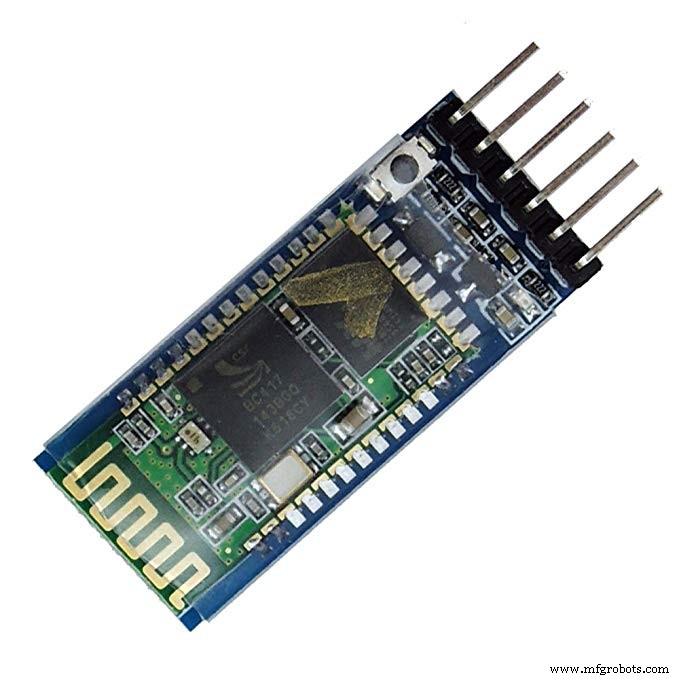
로봇과 스마트폰의 Dabble 앱을 연결하는 모듈을 추가해야 합니다.
우리는 블루투스 HC05 모듈을 복용하고 있습니다. 연결 그림과 같이 연결합니다.
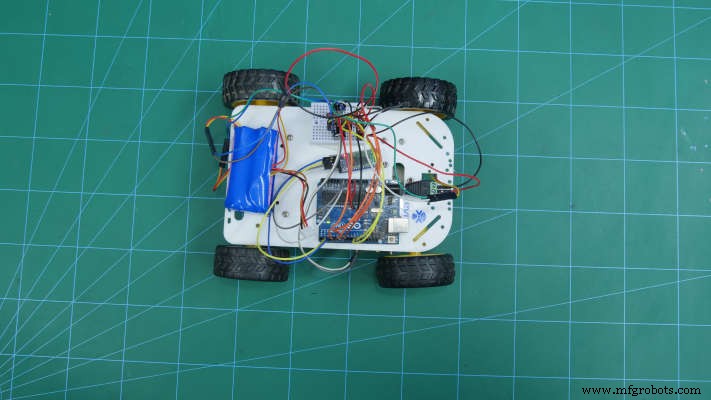
6단계:배터리 추가
로봇에 추가 전원을 추가해야 합니다. 또한 Arduino Uno를 배터리와 연결하기 위해 DC Terminal Block 또는 DC Jack을 사용할 것입니다.
7단계:Arduino 코드
다음 코드를 업로드하세요.
로봇.이노
8단계:작업
Dabble을 사용하여 로봇을 스마트폰에 쉽게 연결할 수 있습니다.
모듈로 작업하기 전에 작업 중인 블루투스를 연결해야 합니다.
다른 기능을 위해 앱에서 사용할 수 있는 많은 모듈이 있습니다.
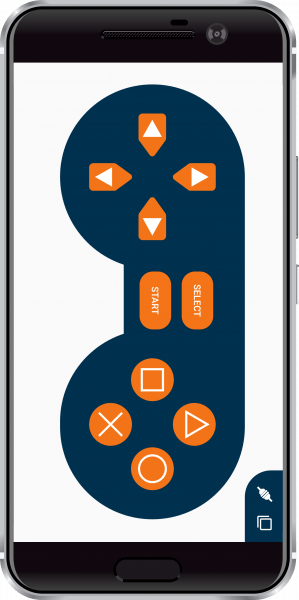
오늘 우리는 게임패드 모듈로 작업할 것입니다.
그리고 왼쪽 버튼 세트를 사용할 것입니다.
<울>
9단계:결론
이것으로 DIYDabble로 제어되는 4륜 로봇이 작동할 준비가 되었습니다!
쉿! 아시다시피 Dabble은 로봇을 무선으로 제어하는 것 이상을 할 수 있습니다. 여기에서 더 자세히 알아볼 수 있습니다!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
/* * * 이 프로젝트는 Dabble 앱을 사용하여 arduino 4륜 로봇을 제어하는 방법을 보여줍니다. * 우리는 디지털 모드에서 게임패드 모듈을 사용할 것입니다. pad-module/ * * 이 프로젝트에서 우리는 HC-05 블루투스 모듈을 사용할 것입니다 * arduino "UNO"의 경우 블루투스 모듈 buadrate 38400 미만을 사용합니다 * * arduino와 블루투스 모듈의 연결 * * HC-05 블루투스 모듈 ----> arduino "UNO" * * Tx ----> 2 * Rx ----> 3 * * 작성자:Punit chotaliya, STEMpedia * 2019년 1월 16일 * *///Arduino 프로그램에 GamePad 모듈을 포함하려면 //다음 헤더를 포함해야 합니다.#define CUSTOM_SETTINGS#define INCLUDE_GAMEPAD_MODULE//Dabble 앱 라이브러리 포함 #include#define motor1_en 10 // 모터 1 활성화 핀 #define motor2_en 11 // 모터 2 활성화 핀 # define motor1_dir1 4 // 모터 1 input1(InputA) #define motor1_dir2 5 // 모터 1 input2(InputA)#define motor2_dir1 6 // 모터 2 input1(InputB)#define mo tor2_dir2 7 // 모터 2 input2 (InputB)void setup() { // 여기에 설정 코드를 입력하여 한 번 실행합니다. Serial.begin(9600); // 9600 baudrate를 사용하여 직렬 통신을 시작합니다. Dabble.begin(38400); // 블루투스 모듈 baudrate 입력 // 참고:arduino "UNO"의 경우 38400 미만의 블루투스 모듈 baudrate를 사용하십시오. for(unsigned int i=4;i<8;i++) { pinMode(i,OUTPUT); // motor1, motor2의 입력 핀을 출력 핀으로 선언 } pinMode(motor1_en,OUTPUT); // 모터의 인에이블 핀을 출력으로 선언 pinMode(motor2_en,OUTPUT); }void loop() { // 여기에 기본 코드를 넣어 반복적으로 실행합니다. Dabble.processInput(); // arduino UNO가 모바일 앱에서 가져온 데이터를 새로 고치려면 다음 코드 줄을 사용해야 합니다. if (GamePad.isUpPressed()) // 게임 패드에서 UP을 누른 다음 로봇을 앞으로 이동 { Serial.print ("위로"); 앞으로(); } else if (GamePad.isDownPressed()) // 게임패드에서 DOWN을 누르면 로봇을 뒤로 이동합니다. { Serial.print("DOWN"); 뒤로(); } else if (GamePad.isLeftPressed()) // 게임패드에서 LEFT를 누르면 로봇을 이동합니다. LEFT { Serial.print("Left"); 왼쪽(); } else if (GamePad.isRightPressed()) // 게임패드에서 오른쪽을 누르면 로봇을 움직입니다. RIGHT { Serial.print("Right"); 오른쪽(); } else // 로봇을 중지합니다. { Serial.println("strop"); 중지(); } } void forward() // 로봇 앞으로 이동하는 함수 { analogWrite(motor1_en,255); analogWrite(motor2_en,255); 디지털 쓰기(모터1_dir1,높음); digitalWrite(모터1_dir2,낮음); 디지털 쓰기(모터2_dir1, 높음); 디지털 쓰기(모터2_dir2,낮음); } void backward() // 로봇 후진을 위한 함수 { analogWrite(motor1_en,255); analogWrite(motor2_en,255); 디지털 쓰기(모터1_dir1,낮음); 디지털 쓰기(모터1_dir2,높음); 디지털 쓰기(모터2_dir1,낮음); digitalWrite(모터2_dir2,높음); } void left() // 로봇 왼쪽 이동 함수 { analogWrite(motor1_en,255); analogWrite(motor2_en,255); 디지털 쓰기(모터1_dir1,낮음); 디지털 쓰기(모터1_dir2,높음); 디지털 쓰기(모터2_dir1, 높음); digitalWrite(모터2_dir2,낮음); } void right() // 로봇 오른쪽 이동을 위한 함수 { analogWrite(motor1_en,255); analogWrite(motor2_en,255); 디지털 쓰기(모터1_dir1,높음); 디지털 쓰기(모터1_dir2,낮음); 디지털 쓰기(모터2_dir1,낮음); digitalWrite(모터2_dir2,높음); } void Stop() // // 움직임이 없는 함수 { analogWrite(motor1_en,0); analogWrite(모터2_en,0); 디지털 쓰기(모터1_dir1,낮음); 디지털 쓰기(모터1_dir2,낮음); 디지털 쓰기(모터2_dir1,낮음); digitalWrite(모터2_dir2,낮음); }
미리보기 없음(다운로드만 가능).
제조공정
구성품 및 소모품 닌텐도 쌍절곤 × 1 SparkFun 레벨 시프터 × 1 Arduino UNO × 1 이 프로젝트 정보 머리말 원래 이 게시물은 www.xarg.org에 게시되었습니다. Arduino와 함께 Wii Nunchuk 사용 우리는 모두 게임 패드를 손에 들고 성장했으며 문자 그대로 가능한 모든 응용 프로그램과 결합하는 데 이상적입니다. Nintendo의 위대한 발명품은 Wii U 리모컨의 저렴한 확장 기능인 Nunchuk입니다.
구성품 및 소모품 Arduino 윤 × 1 초음파 센서 × 1 서보(타워 프로 MG996R) × 1 점퍼 와이어(일반) × 10 앱 및 온라인 서비스 Arduino IDE MATLAB 이 프로젝트 정보 1단계:이론 이 프로젝트에서는 초음파 거리 센서를 사용하고 있습니다. 사람이 들을 수 없는 범위의 음파를 생성하고 이 음파가 장애물에 부딪치고 되돌아오는 데 필요한 시간을 계산하여 거