

제조공정

산업 제조
 |
| × | 1 | |||
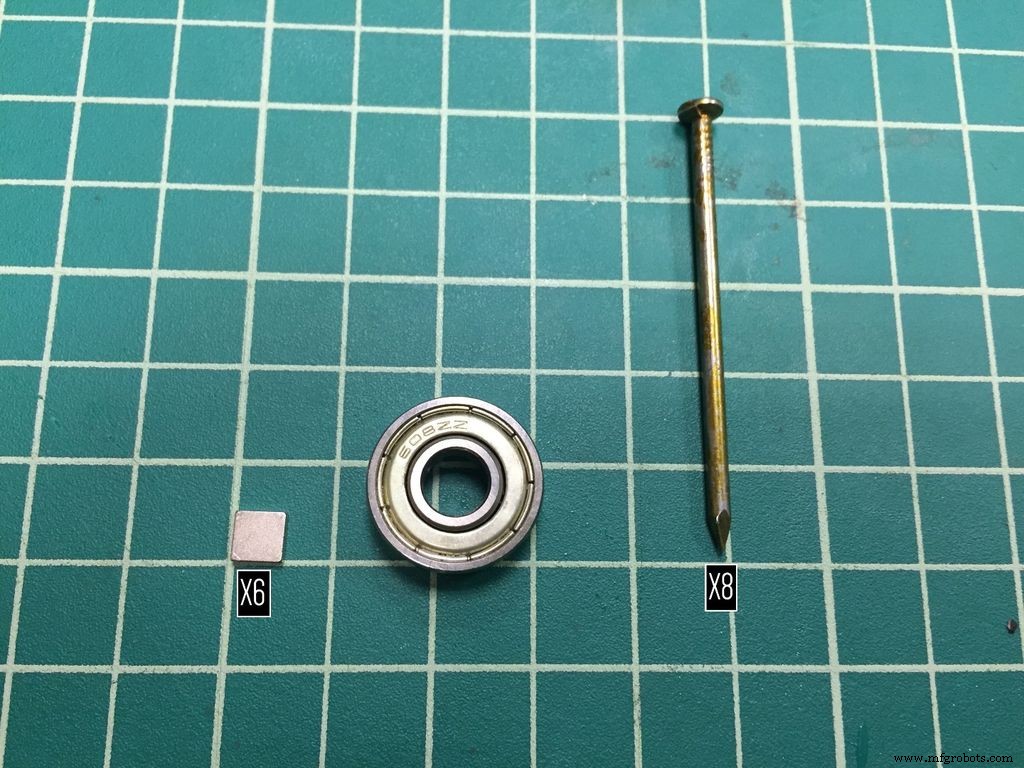
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
저는 최근에 3D 인쇄된 DC 모터에 대한 이 지침을 발견했고 단계를 취할 수 있다고 생각했습니다. 더 나아가; 문자 그대로. 저는 이 스테퍼 모터를 8개의 전자석, 6개의 네오디뮴 자석, 3d 인쇄된 회전자와 고정자 하우징으로 설계했습니다. 이것은 특히 15도 풀 스텝 및 7.5도 하프 스텝이 가능한 영구 자석 스테퍼 모터입니다. 다양한 유형의 스테퍼 모터가 있지만 대부분은 여기에서 설계한 모터와 매우 유사하게 작동합니다. 이것은 스테퍼 모터가 어떻게 작동하는지 보여주기 위한 교육용 디스플레이입니다. 대부분의 USB 전원 공급 장치에서 작동하도록 5-12VDC 전원 공급 장치에서 실행되도록 설계했습니다.
저도 제 유튜브 채널에서 경품 이벤트를 하고 있습니다. 아두이노, 이 프로젝트에 사용된 트랜지스터, 그리고 일부 스위치를 나누어 드리겠습니다. 자세한 내용은 마지막 단계에서.

 <올>
<올> 
3D Hub로 인쇄하세요!



나침반을 사용하여 자석의 극을 결정하고 북극이 바깥쪽을 향하도록 자석을 붙입니다. 자석이 충분히 강하면 일부 스마트폰의 나침반에 자석의 극성이 표시됩니다.
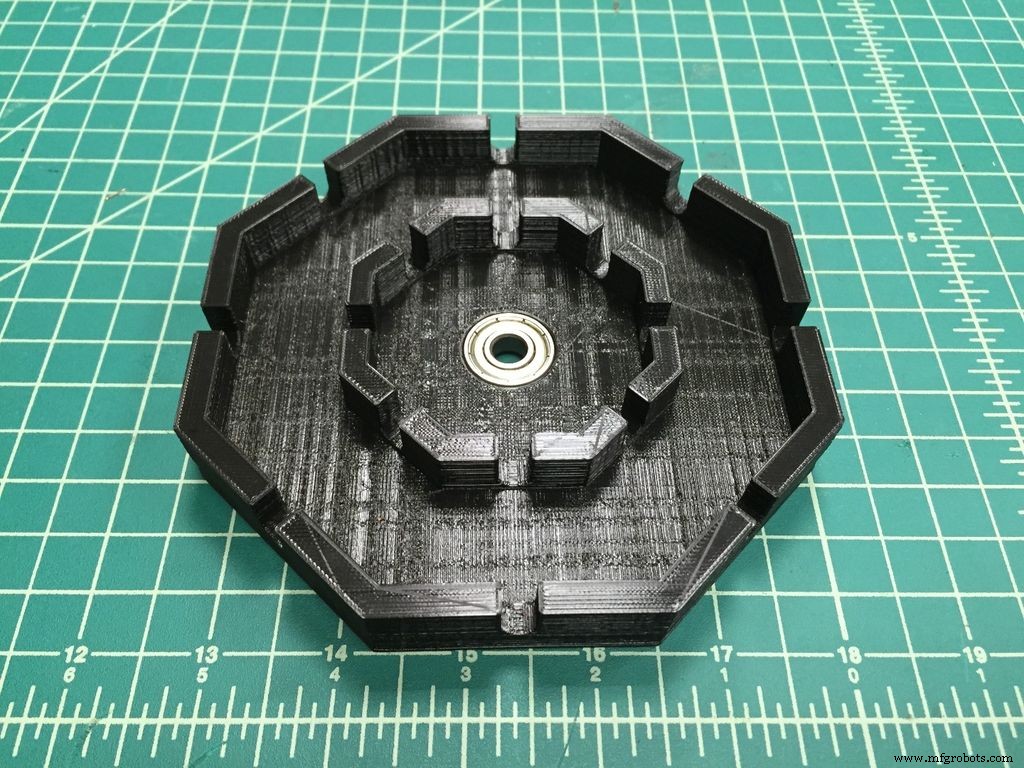

베어링을 고정자에 압입한 다음 회전자를 베어링에 밀어 넣습니다. 베어링 프레스가 고정자에 얼마나 잘 맞는지 매우 놀랐습니다. 3D 프린팅을 할 때 구멍은 안쪽으로 수축되고 예상보다 작아지는 경향이 있으므로 일반적으로 약간 크게 만듭니다.
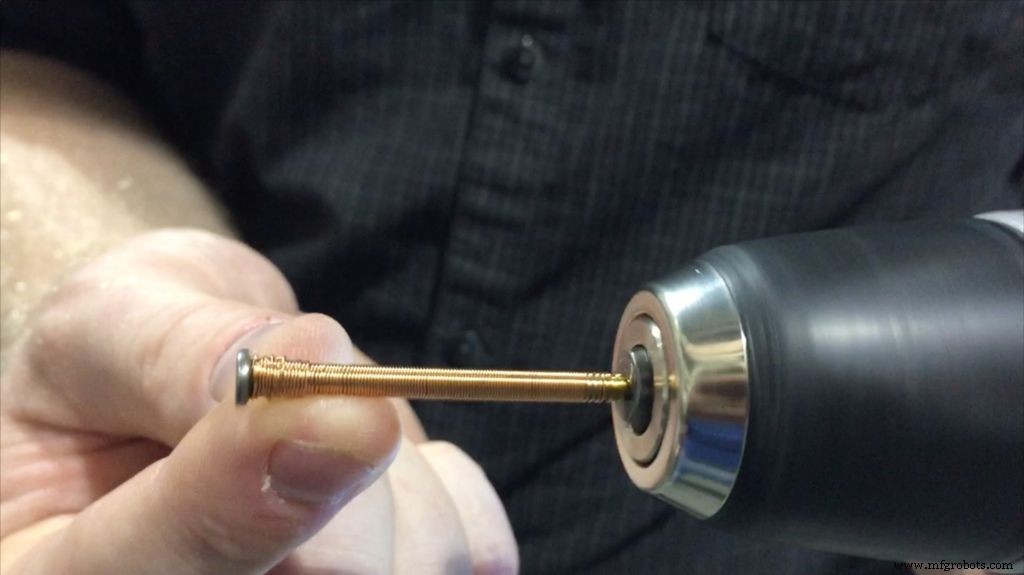

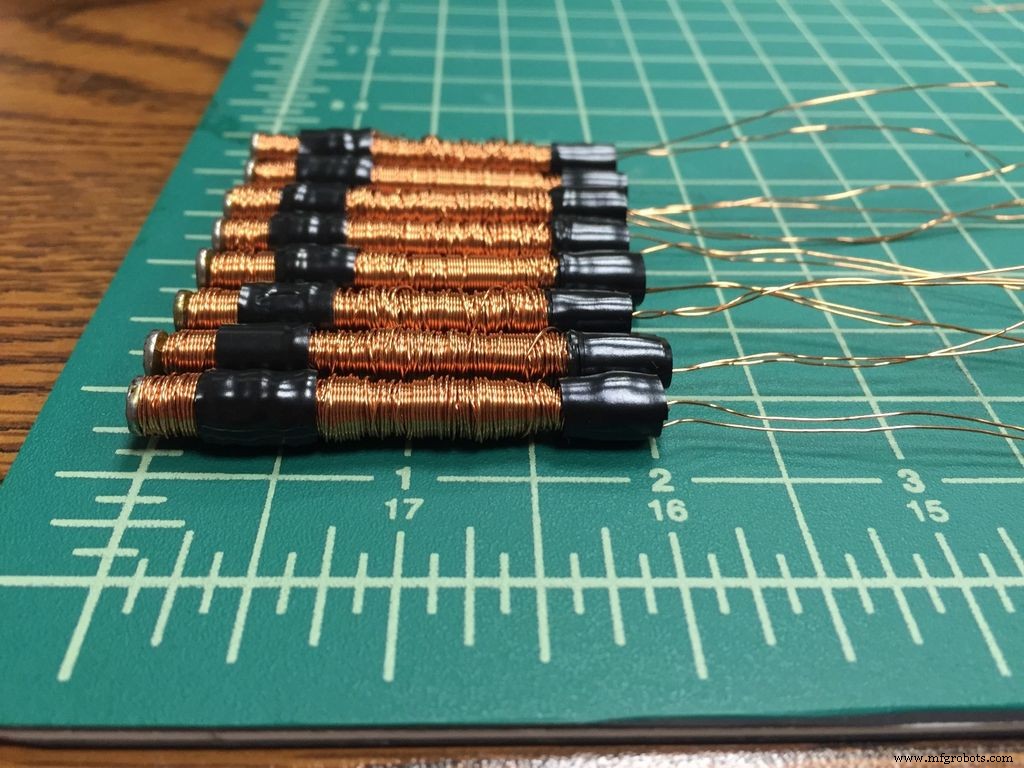
와이어 9개를 25피트로 자르고 드릴로 감습니다. 나침반과 배터리를 사용하여 못의 머리 부분에 남극을 제공하는 데 필요한 구성을 결정하십시오. 마커 또는 열 수축 튜브를 사용하여 전자석의 음극 리드를 표시합니다. 고정자 하우징과 접촉하게 될 전자석 섹션을 전기 테이프로 감쌉니다. 이것은 두 가지 목적을 수행합니다. 전자석을 제자리에 단단히 고정하고 코일이 생성할 수 있는 열로부터 하우징을 절연합니다. 코일 쌍은 내가 사용하는 5V 전원 공급 장치로 약 1A를 소비합니다. 내가 선택한 트랜지스터는 코일이 약 3A를 끌어오는 12V 전원 공급 장치를 사용하여 처리할 수 있습니다. 더 높은 전압 공급 장치의 문제는 잠시 동안 작동 상태로 두면 코일이 따뜻해지기 시작한다는 것입니다.
경고:
나는 이것을 5-12VDC 전원 공급 장치에서 실행하도록 설계했습니다. 구타 경로를 벗어나기로 결정했다면 옴의 법칙을 사용하여 원하는 코일 크기를 결정하십시오. V =I*R
코일의 권선이 적을수록 저항이 낮아집니다. 주의하지 않으면 코일이 전원 공급 장치나 트랜지스터가 처리할 수 있는 것보다 더 많은 전류를 끌어들여 나쁜 일이 발생할 것입니다.
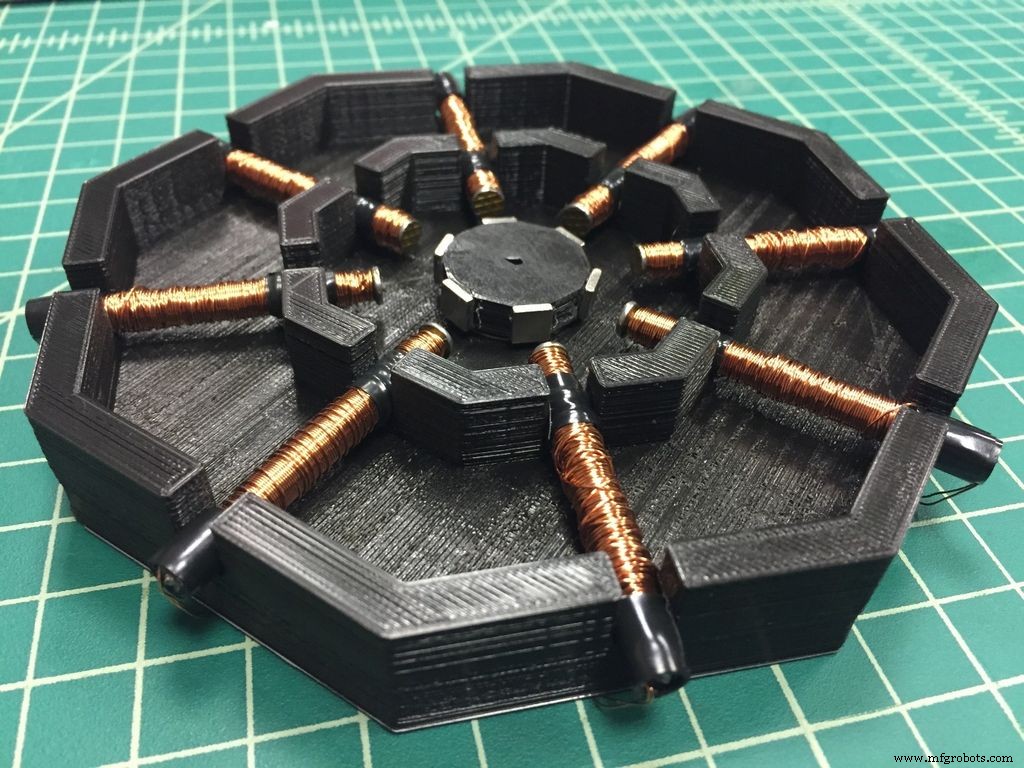
전자석을 네오디뮴 자석에서 약 1/4"이 될 때까지 고정자에 밀어 넣습니다. 원하는 대로 전자석을 안팎으로 밀어넣을 수 있지만 못이 훨씬 빨리 자화되기 때문에 전자석을 너무 가까이에서 원하지 않았습니다. 그것이 못을 사용하는 것의 단점입니다. 모터는 자화되면 여전히 작동하지만 효율성이 떨어집니다. 약간의 정리가 있는 경우 용접봉이 못의 좋은 대안입니다.
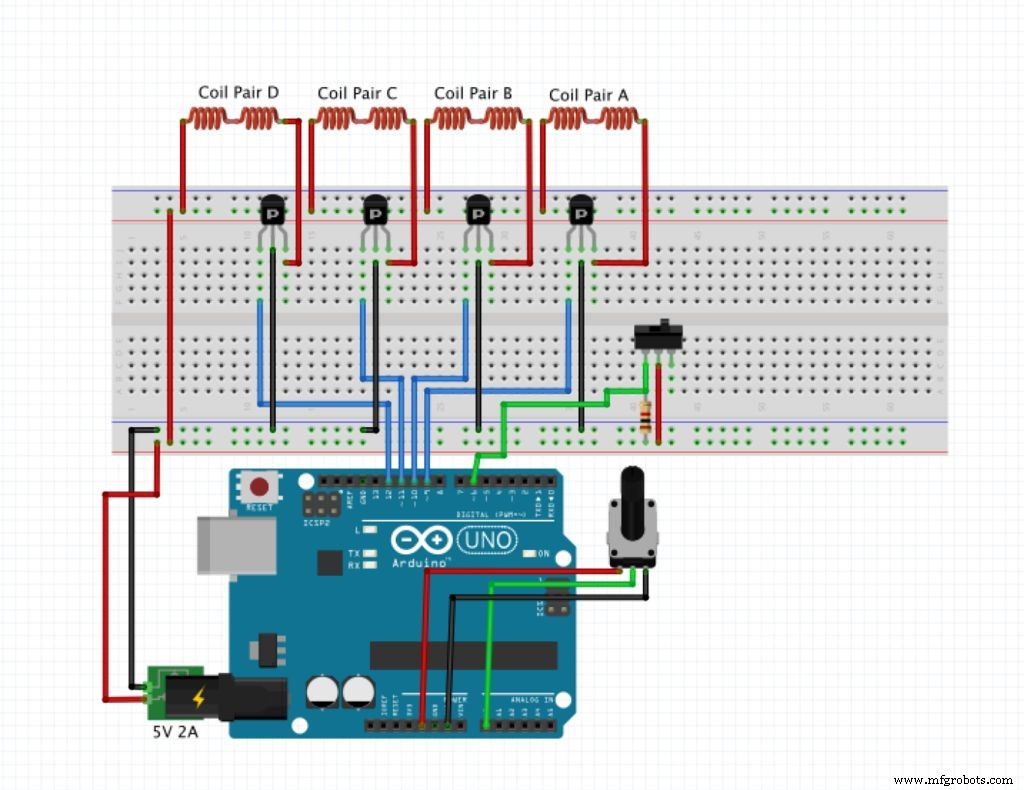
코일 쌍을 직렬로 연결하고 전자석의 모든 남극이 안쪽을 향하도록 연결하십시오. 회로도에서 사용한 저항은 1k 저항입니다. 이것의 목적은 오프 위치에 있을 때 디지털 핀이 높게 "뜨는" 것을 방지하는 것입니다. 다시 말하지만, 코일에 요구되는 전류를 견딜 수 있는 트랜지스터를 사용해야 합니다.
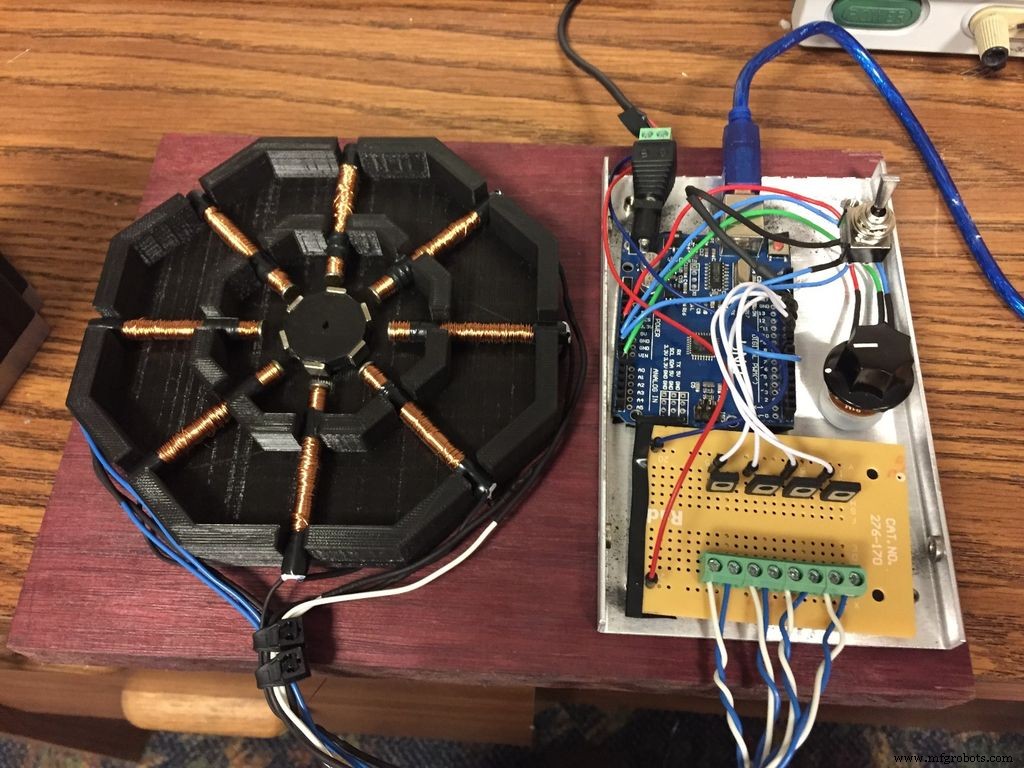
소스 코드를 arduino에 로드하면 준비가 완료됩니다!

이 프로젝트에 사용된 트랜지스터인 arduino와 일부 스위치 및 점퍼 와이어를 증정합니다.
경품 규칙:
내 구독 YouTube 채널, 이 비디오를 보고 다음에 제가 만들고 싶은 것을 비디오에 댓글로 남겨주세요. 9월 1일 구독자 댓글을 무작위로 선정하여 무료로 발송해 드리겠습니다! 환영하는 커뮤니티가 되어 주셔서 감사합니다!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">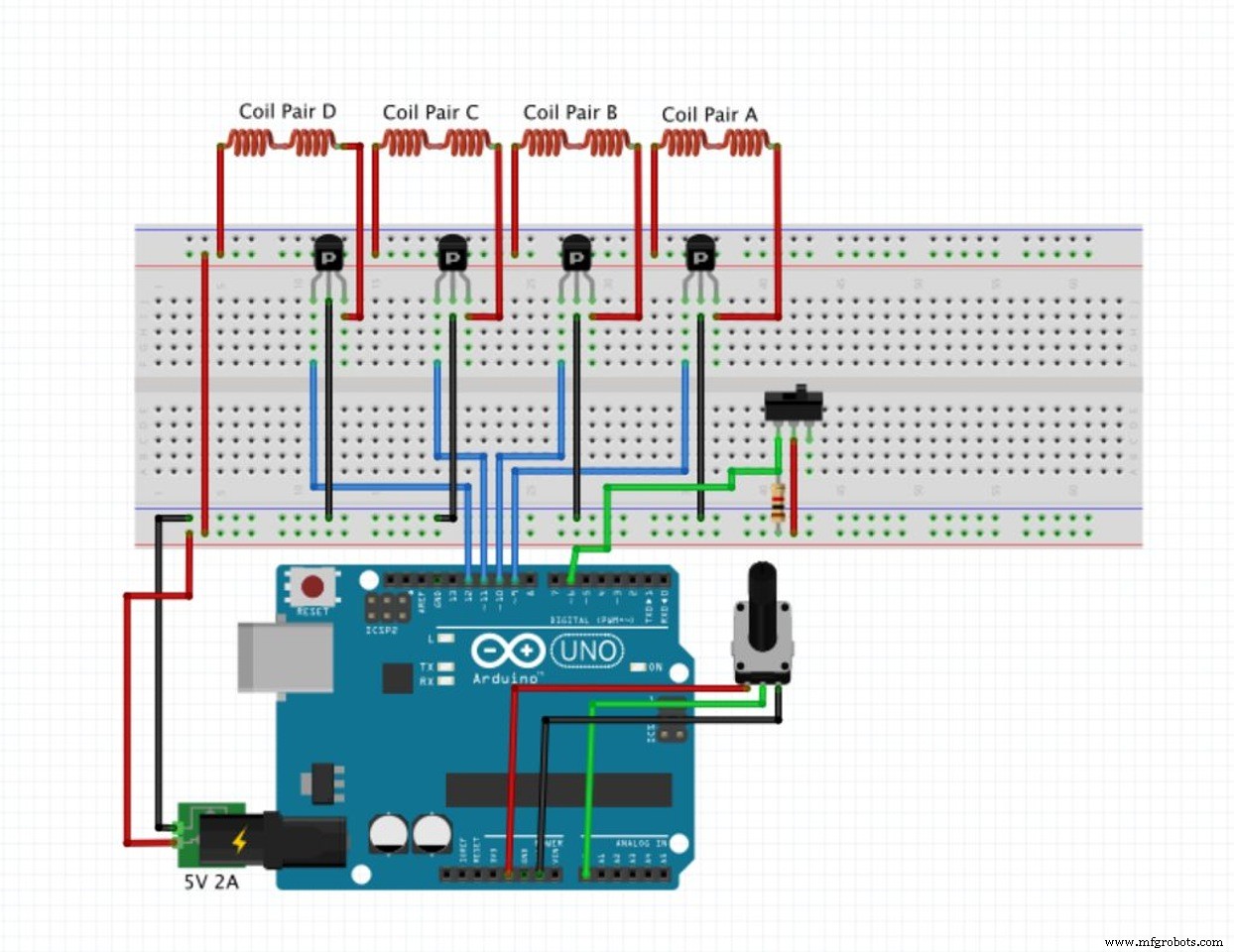
제조공정
스테퍼 모터 수리를 위해 회사를 선택하는 방법을 알려드리겠습니다. 스테퍼 모터란 무엇인가요? 스테퍼 모터는 전기 펄스의 변환에서 기계적인 움직임을 달성하는 전기 기계 장치입니다. 지속적으로 인가되는 전압이 아니라 디지털 펄스에 의해 구동됩니다. 지속적으로 회전하는 기존의 전기 모터와 달리 스테퍼 모터는 고정된 각도 증분으로 작은 단계로 회전합니다. 또한 위치 제어를 유지하기 위해 피드백이 필요한 서보 모터와 달리 스테퍼 모터는 디지털 명령을 따릅니다. 스테퍼 모터의 응용 스테퍼 모터는 위치 제어를 위한 많은 응용 분야에서 사
Sherline CNC 시스템 구성 요소 및 연결. 시스템 구성요소 1) 1-5/8″ 수동 핸드휠2) Z축 스테퍼 모터3) 스테퍼 모터 마운트4) 표준 액세서리가 있는 Sherline 수직 밀(그림은 모델 2000 밀)5) 백업 Linux/EMC2 설치 CD, Sherline 지침 CD6) Y축 스테퍼 모터7) X축 스테퍼 모터8) 선택적 A축용 케이블(CNC) 회전 테이블) 연결9) 키보드 및 마우스가 있는 컴퓨터10) 스테퍼 모터 전원 공급 장치용 켜기/끄기 스위치11) USB 드라이브 포트(전면)12) CD -RW 드라이