

제조공정

산업 제조
 |
| × | 1 | |||

| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
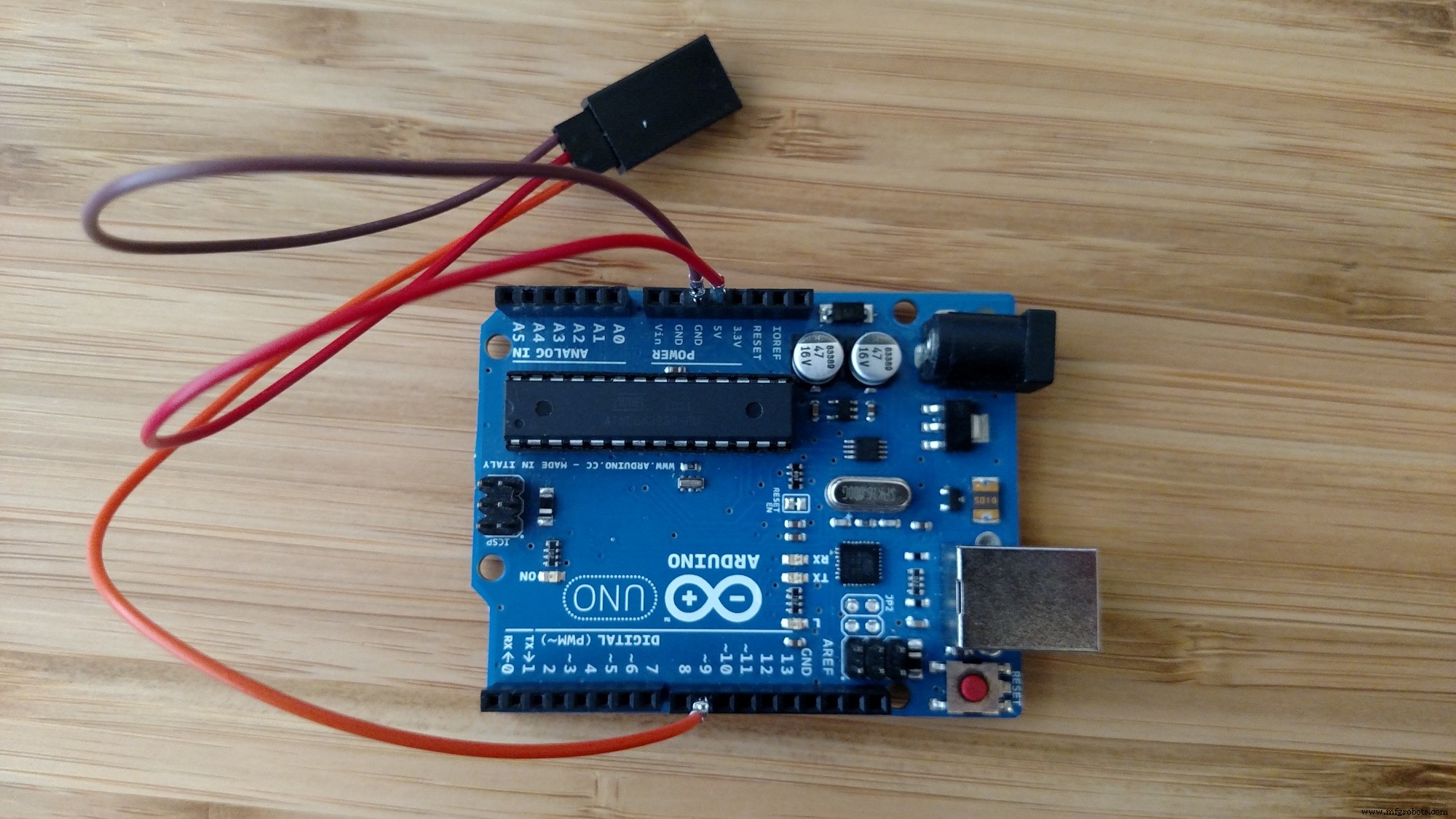
Solo는 훌륭한 개발 환경을 가지고 있지만 I/O가 부족합니다. 현재 액세서리 포트는 CAN, Mavlink Serial to Pixhawk, USB to Sololink(imx6)를 분리합니다. arduino 및 firmata를 사용하여 맞춤형 센서, 제어 서보, 깜박이는 LED 또는 기타 arduino 기능을 추가할 수 있습니다.
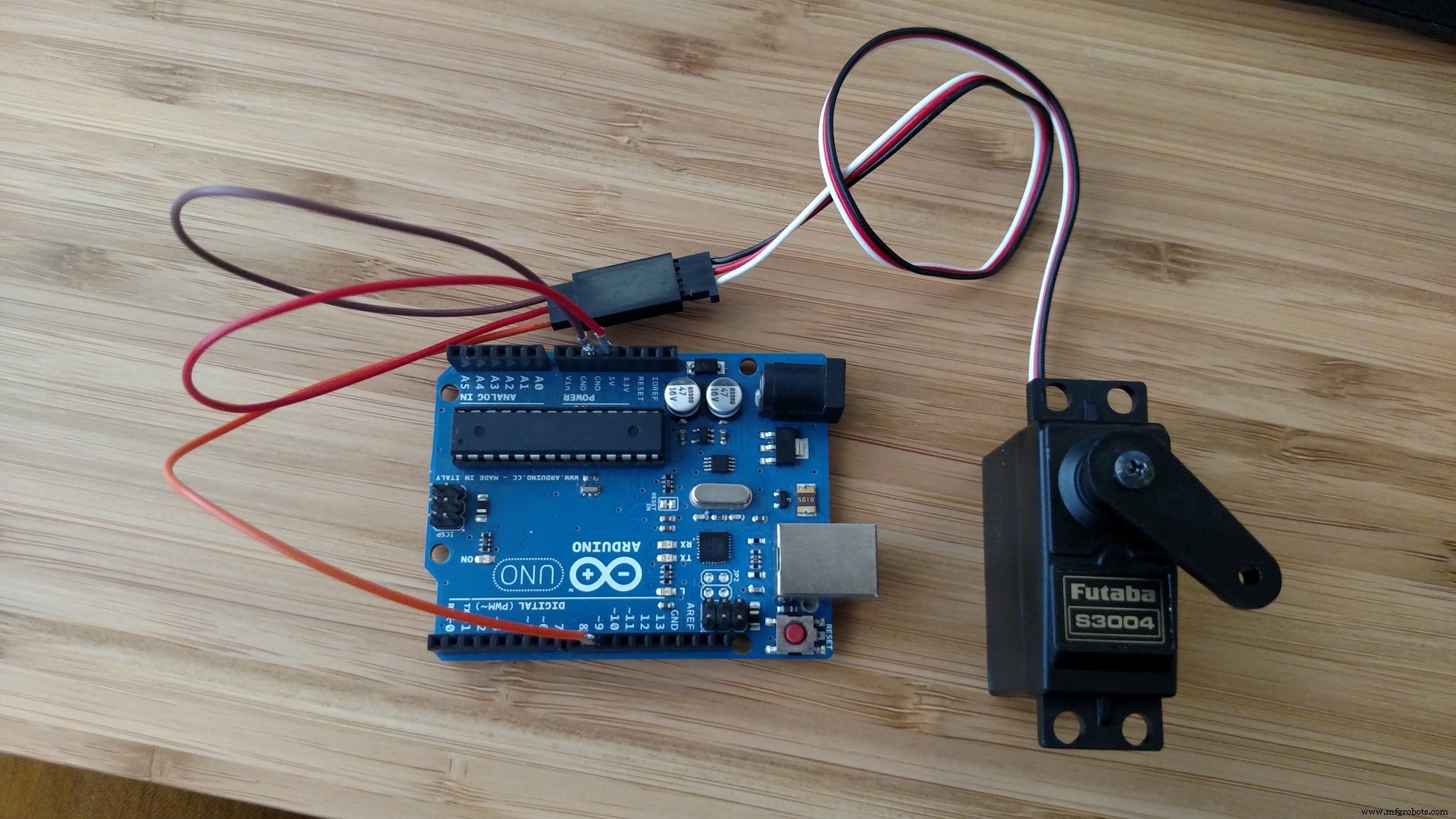
이 튜토리얼은 서보를 제어하기 위해 솔로와 함께 arduino를 사용하는 단계를 안내합니다.
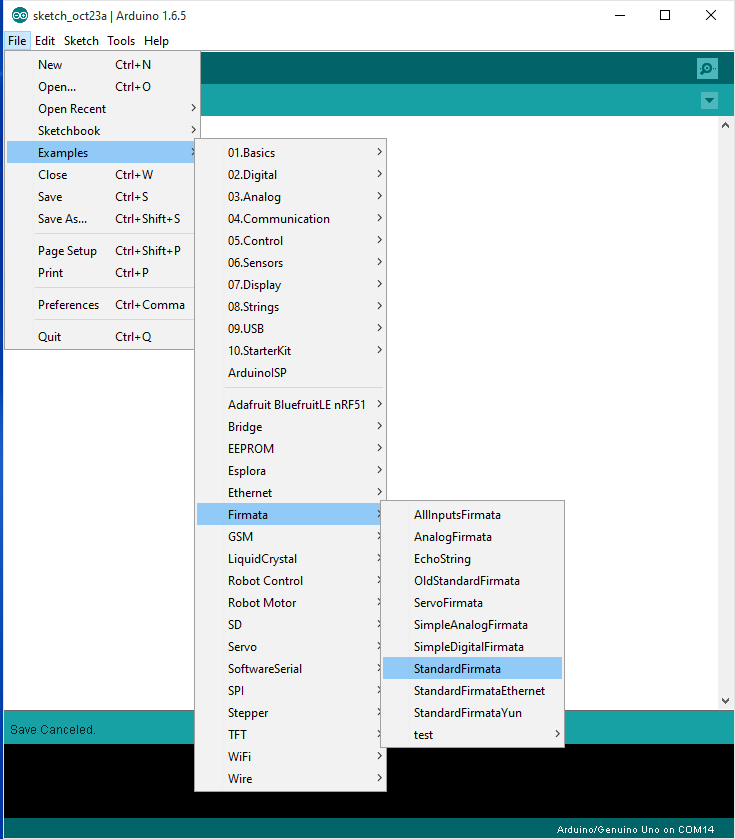
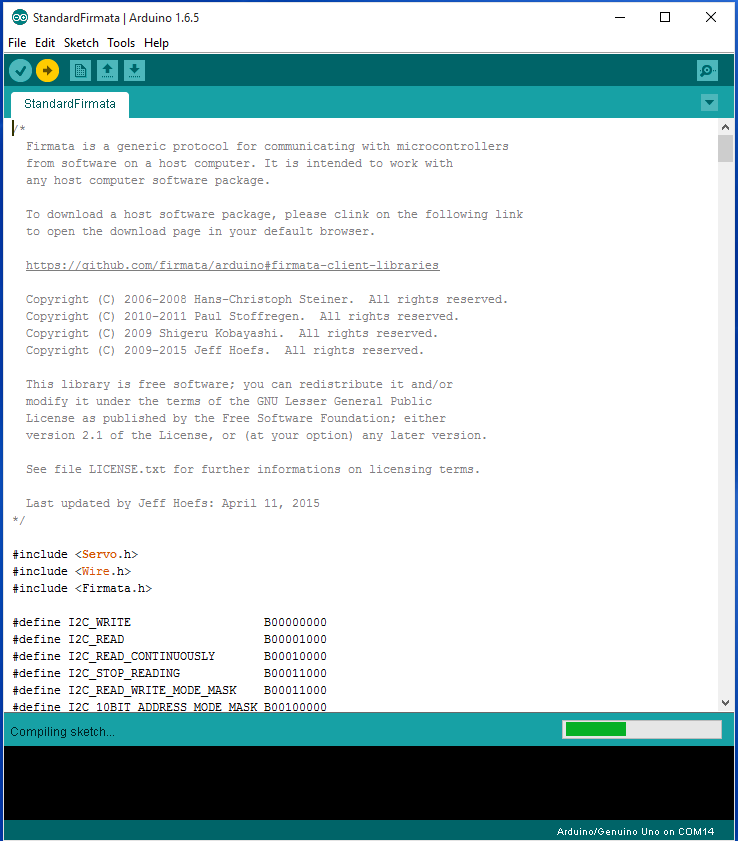
예제 탭에서 StandardFirmata를 엽니다. 보드와 포트를 선택합니다. 업로드!



참고:이 시점에서 브레이크아웃 보드는 판매되지 않습니다. 여기를 참조하세요




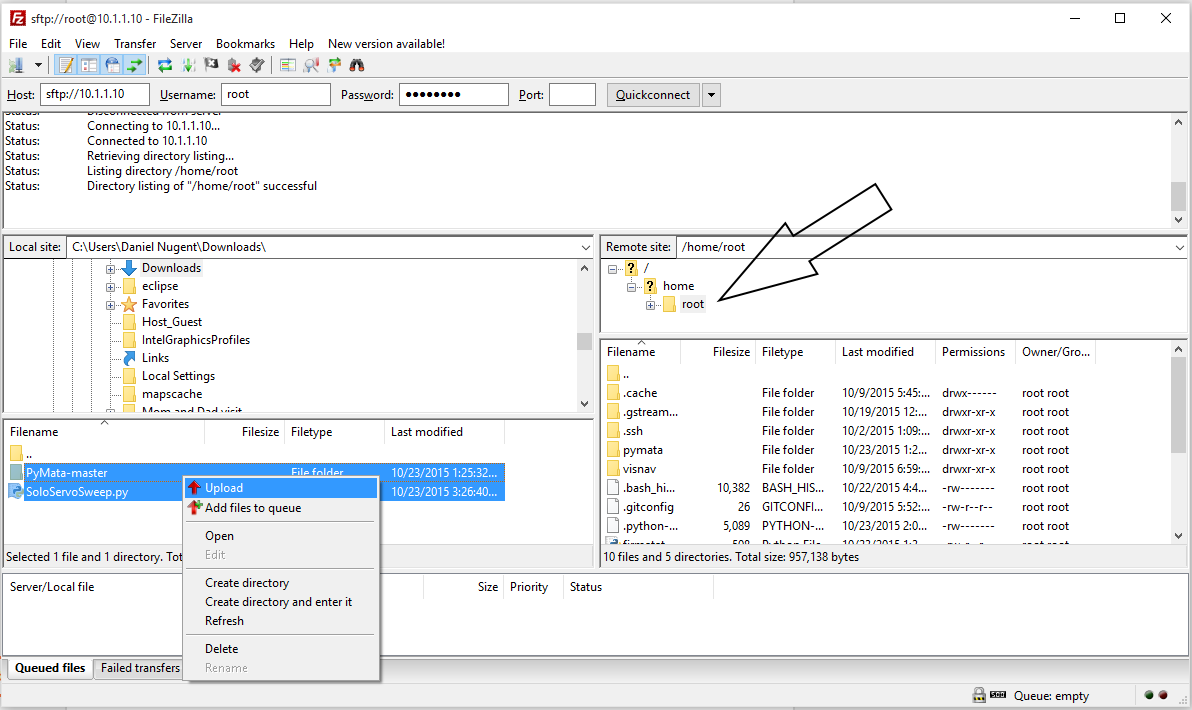
파이마타
SoloServoSweep.py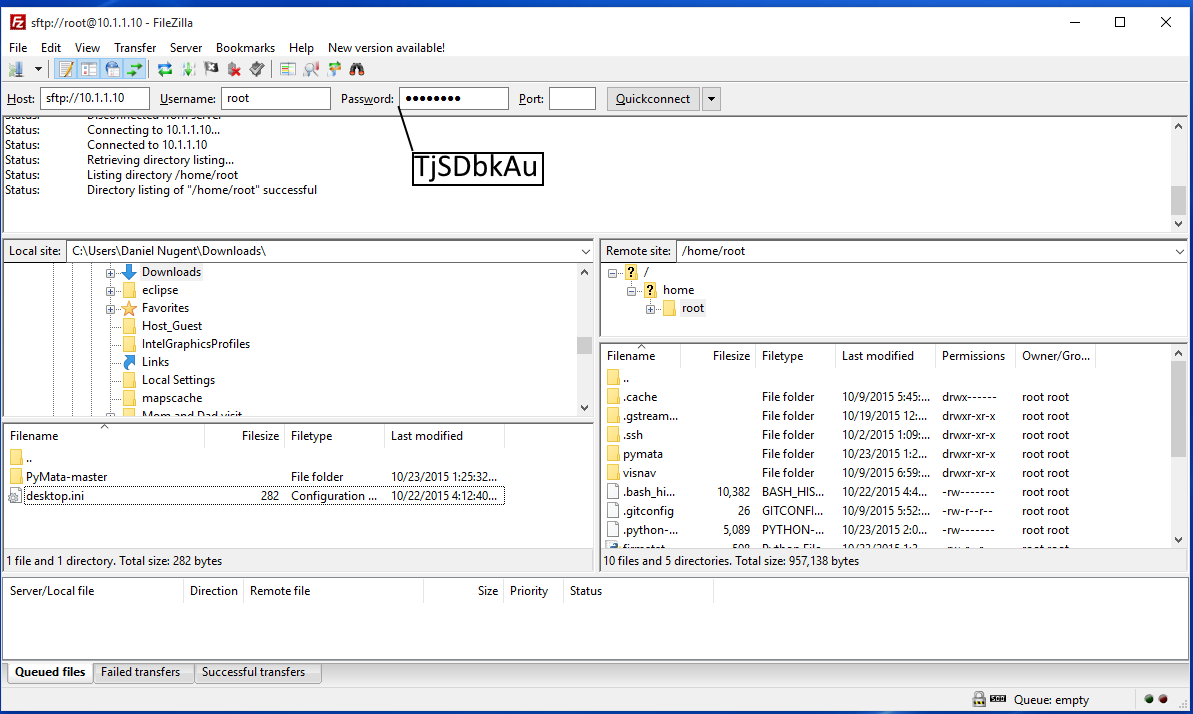
OS의 SSH 클라이언트를 사용하여 SSH로 솔로에 접속합니다. Windows의 경우 Putty를 사용합니다.
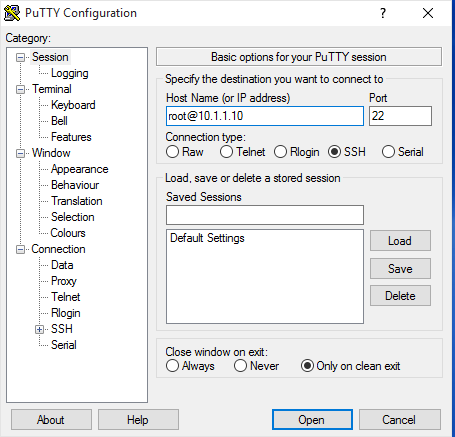
Solo의 Wi-Fi에 계속 연결되어 있는지 확인하세요!
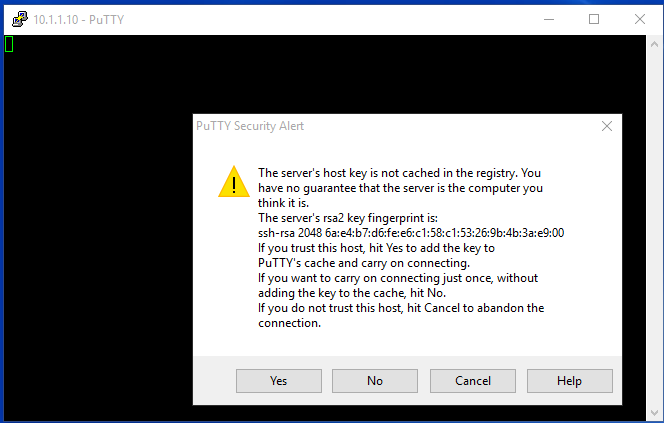
자세한 내용은 사진 설명 참조
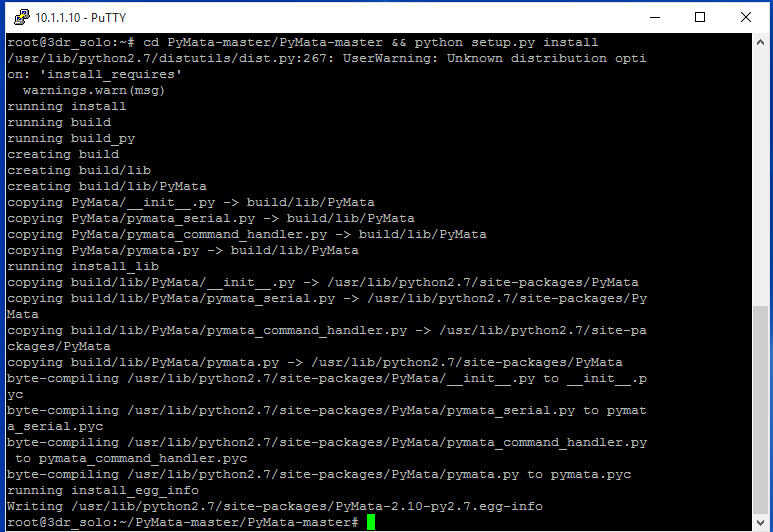
SSH 세션에서 다음 명령을 실행하십시오.
이것은 당신의 결과여야 합니다
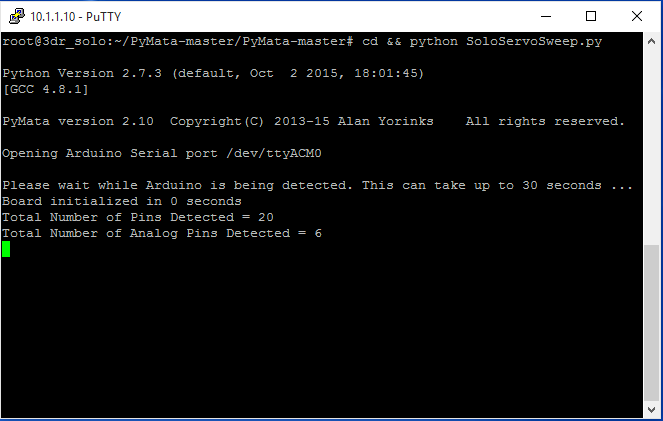
SSH 세션이 열려 있는 동안 실행:
 <섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드"> 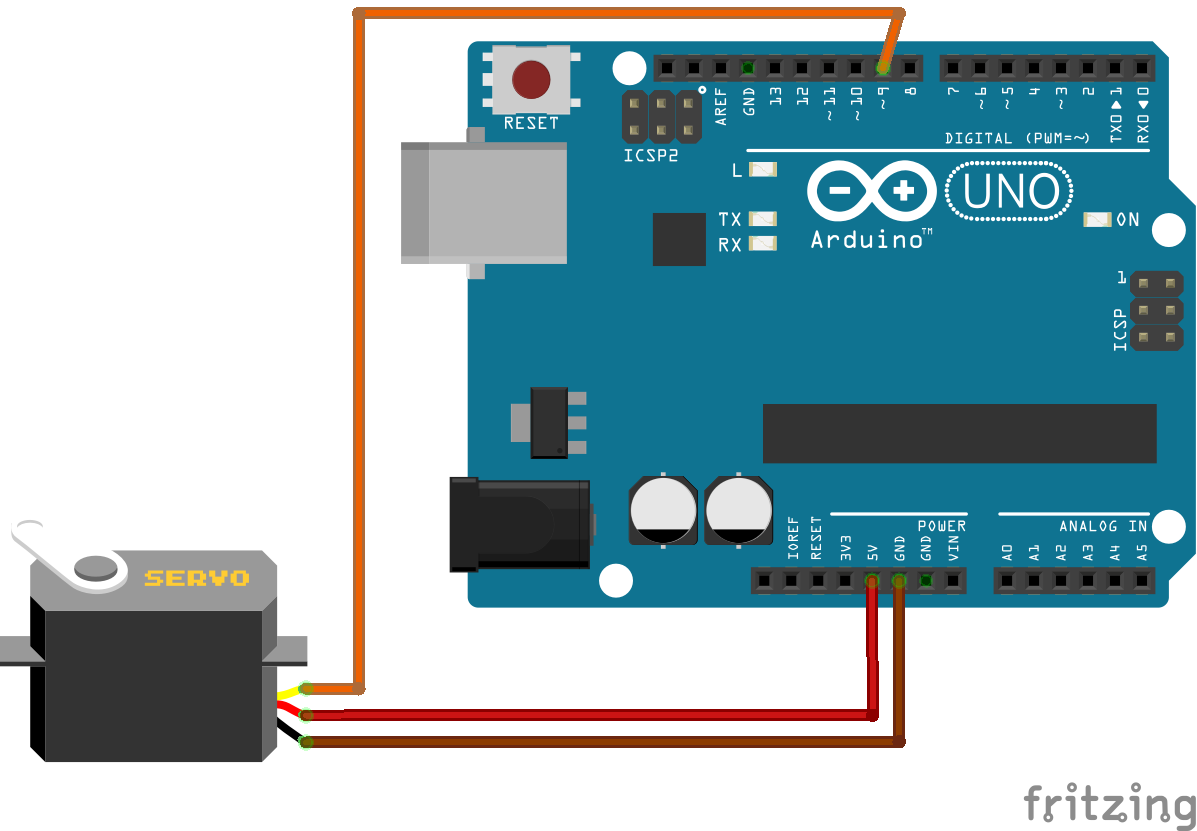
제조공정
이 기사에서는 Arduino 색상 분류기를 만드는 방법을 보여 드리겠습니다. 다음 동영상을 보거나 아래에 작성된 기사를 읽을 수 있습니다. 디자인 이 Arduino 프로젝트에 필요한 것은 컬러 센서(TCS3200) 1개와 취미용 서보 모터 2개뿐입니다. 이 덕분에 이 프로젝트는 매우 간단하지만 구축하는 것은 매우 재미있습니다. 먼저 Solidworks 3D 모델링 소프트웨어를 사용하여 색상 분류기의 디자인을 만들었고 작동 원리는 다음과 같습니다. 초기에는 충전기에 고정되어 있는 컬러 주걱이 상단 서보 모터에 부착된 플랫폼으
이 Arduino 자습서에서는 Arduino 보드와 처리 개발 환경을 사용하여 이 멋진 레이더를 만드는 방법을 보여 드리겠습니다. 자세한 내용은 다음 동영상을 보거나 아래에 작성된 튜토리얼을 참조하세요. 개요 이 Arduino 프로젝트에 필요한 것은 물체를 감지하기 위한 초음파 센서, 센서를 회전시키기 위한 작은 취미 생활자 서보 모터 및 이를 제어하기 위한 Arduino 보드뿐입니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다.[/column] 이 Arduino 프로젝트에 필요한 구성요소 다음 사이트에서