

제조공정

산업 제조
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 5 | ||||
 |
| × | 2 | |||
| × | 2 | ||||
 |
| × | 3 | |||
| × | 5 | ||||
| × | 3 | ||||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
| |||
| ||||
| ||||
| ||||
| ||||
| ||||
| ||||
 |
| |||
|
 |
| |||
|
새로운 도구 종류
Kravox는 디지털 악기 컨트롤러에 기존의 기계 악기와 같은 느낌을 주기 위한 목적으로 Lund University(스웨덴)의 연구 프로젝트의 일부로 만들어졌습니다.
이제 Kravox는 모든 사람이 액세스할 수 있고 음악 실험 플랫폼 역할을 할 것이므로 가능한 한 많은 사람들이 이 흥미진진한 새 악기를 사용할 수 있도록 이 상세한 자습서를 만들었습니다!
Kravox를 플레이하는 방법
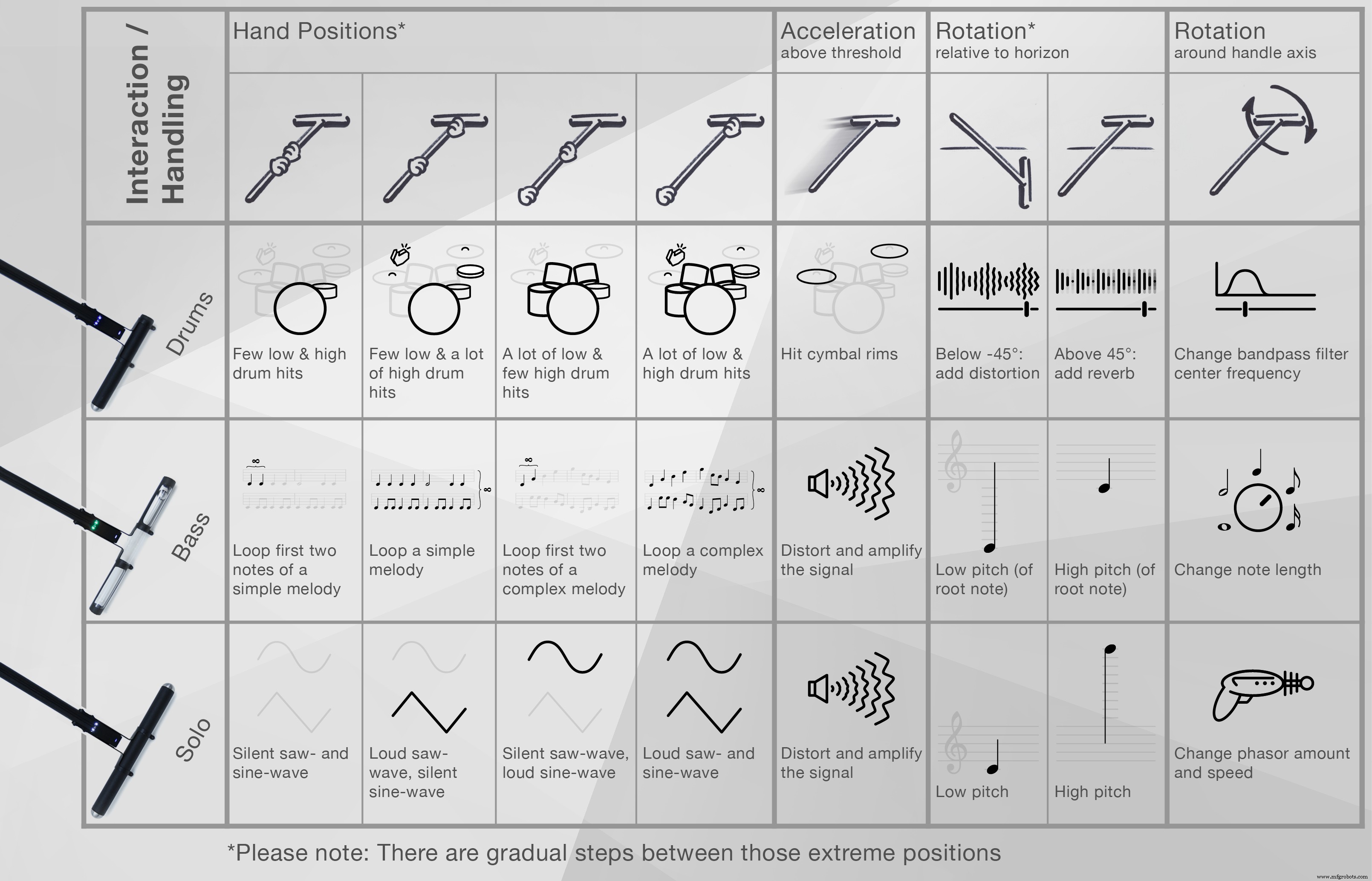
Kravox를 플레이하는 것은 매우 간단합니다. 빗자루와 같은 평범한 물체를 가지고 놀고 있으며 공간을 통해 물체를 만지고 움직이는 방식이 소리가 생성되는 방식을 제어한다고 상상해 보십시오. 이 비디오에서 Kravox를 플레이하는 방법을 보고 들어보세요.
Kravox란 무엇입니까?
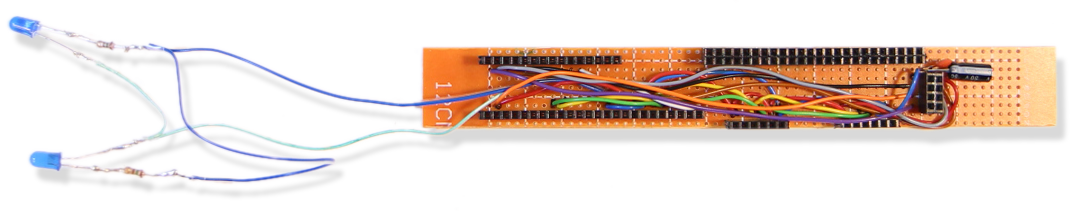
Kravox는 컨트롤러, 수신기 및 소프트웨어의 세 가지 구성요소로 구성된 크로스 플랫폼 호환 오픈 소스 디지털 악기입니다.

컨트롤러
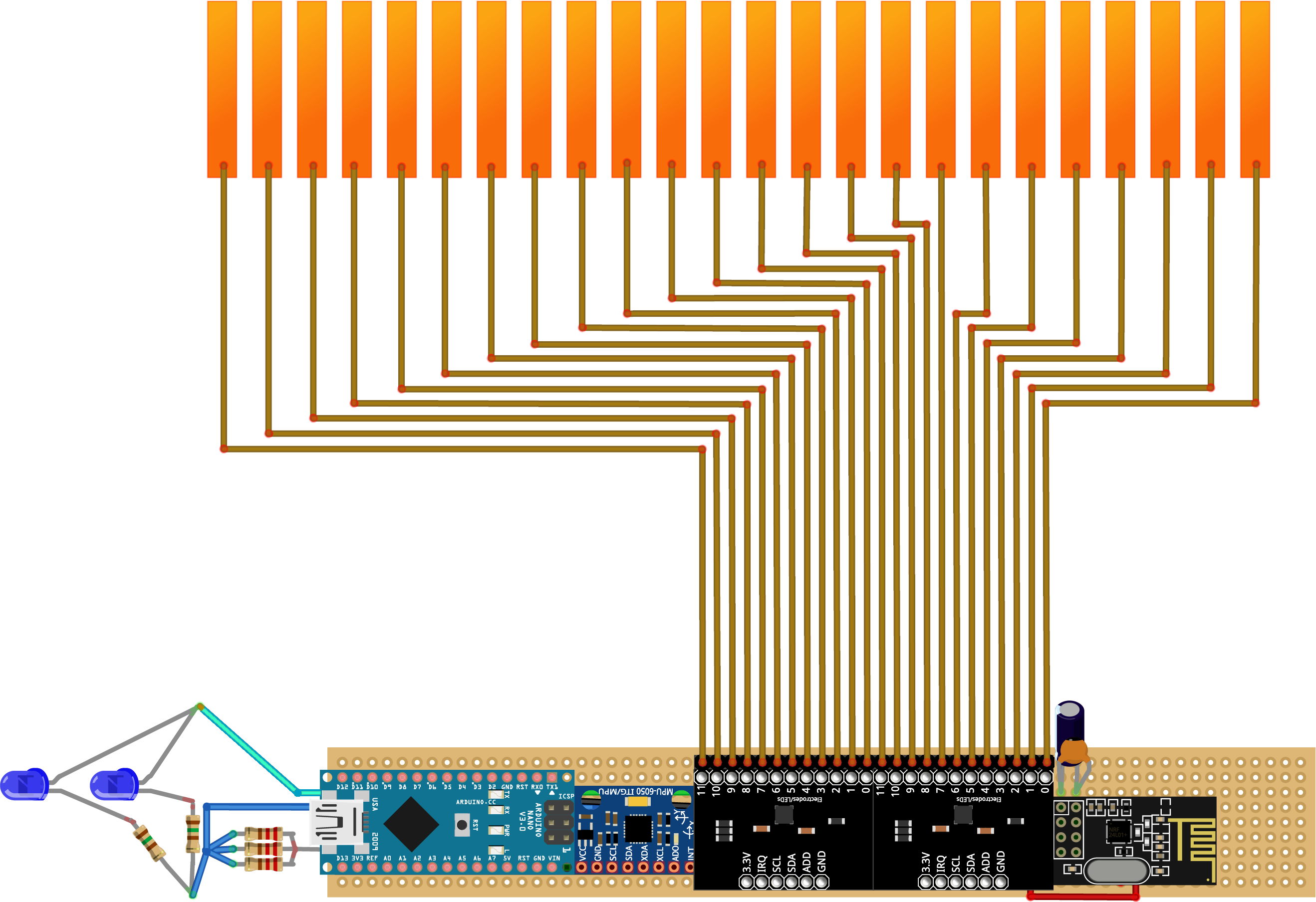
최대 3개의 무선 컨트롤러 장치를 연결할 수 있습니다. 각 컨트롤러는 디지털 MPU-6050 자이로스코프의 방향 및 가속도 데이터와 Arduino Nano에 연결된 2개의 MPR121 터치 센서 보드의 터치 데이터를 처리합니다. 컨트롤러는 nRF24L01 무선 송수신기를 통해 데이터를 수신기 장치로 보냅니다.
둘 이상의 컨트롤러를 사용해야 하는 경우 두 번째 및 세 번째 컨트롤러에 개별 주소를 할당해야 합니다. 주소 할당에 대한 자세한 내용은 컨트롤러 코드의 DECLARATIONS / NRF24L01 섹션에 있는 정보를 참조하십시오.
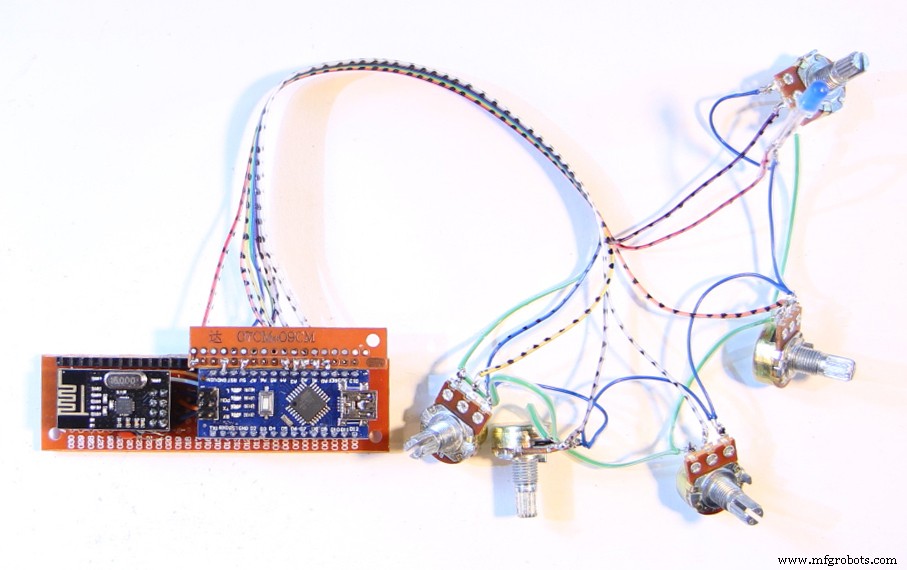
수신자
수신기는 여러 전위차계에서 수집된 데이터와 함께 USB를 통해 컨트롤러에서 수신한 데이터를 연결된 컴퓨터로 전달합니다. 제공된 수신기 장치 코드를 사용하면 최대 3개의 컨트롤러와 통신할 수 있지만 조정 없이 1~2개만 작동할 수도 있습니다.
소프트웨어
수신기의 데이터는 소리를 출력하는 Pure Data Vanilla로 작성된 프로그램에서 처리됩니다.
이 튜토리얼에서 구축할 내용 – 단계별 가이드

Kravox의 장점은 모양, 소리 및 연주 방법을 조정할 수 있다는 것입니다. 이것은 저에게 이 튜토리얼을 위해 복제하기 쉬운 Kravox 버전을 디자인할 기회를 주었습니다.
(궁금한 경우:제 YouTube 채널에서 더 큰 버전의 Kravox를 만든 방법에 대한 타임랩스를 찾을 수도 있습니다.)
위의 비디오와 이 튜토리얼에서는 쉽게 구할 수 있는 전기 부품과 판지로 완전한 기능의 컨트롤러와 수신기를 만드는 방법에 대한 모든 필요한 단계를 보여줍니다.
1부 – 구성 요소 및 도구 수집
Kravox 컨트롤러 + 수신기 스테이션을 구축하려면 다음 구성 요소가 필요합니다.

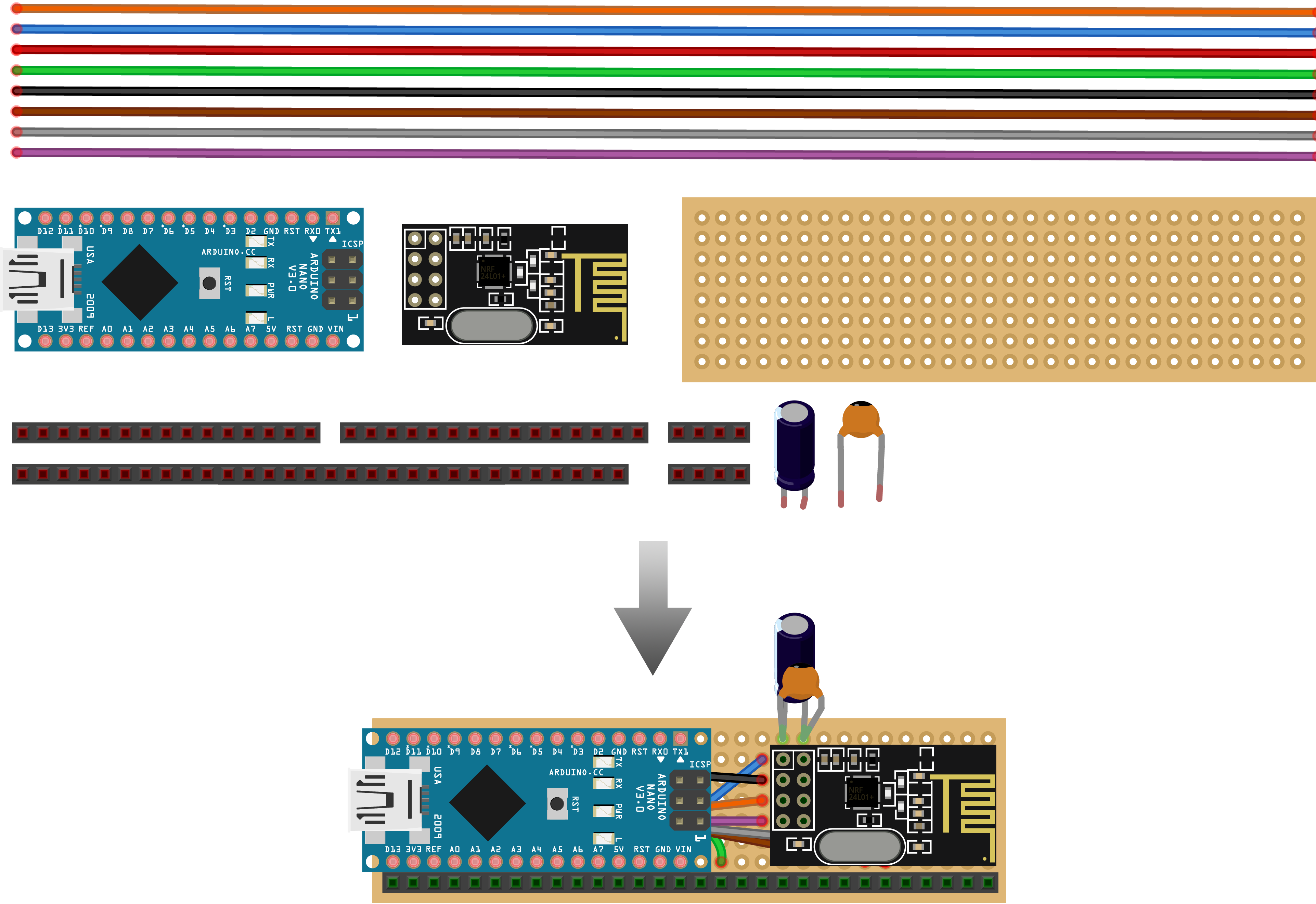
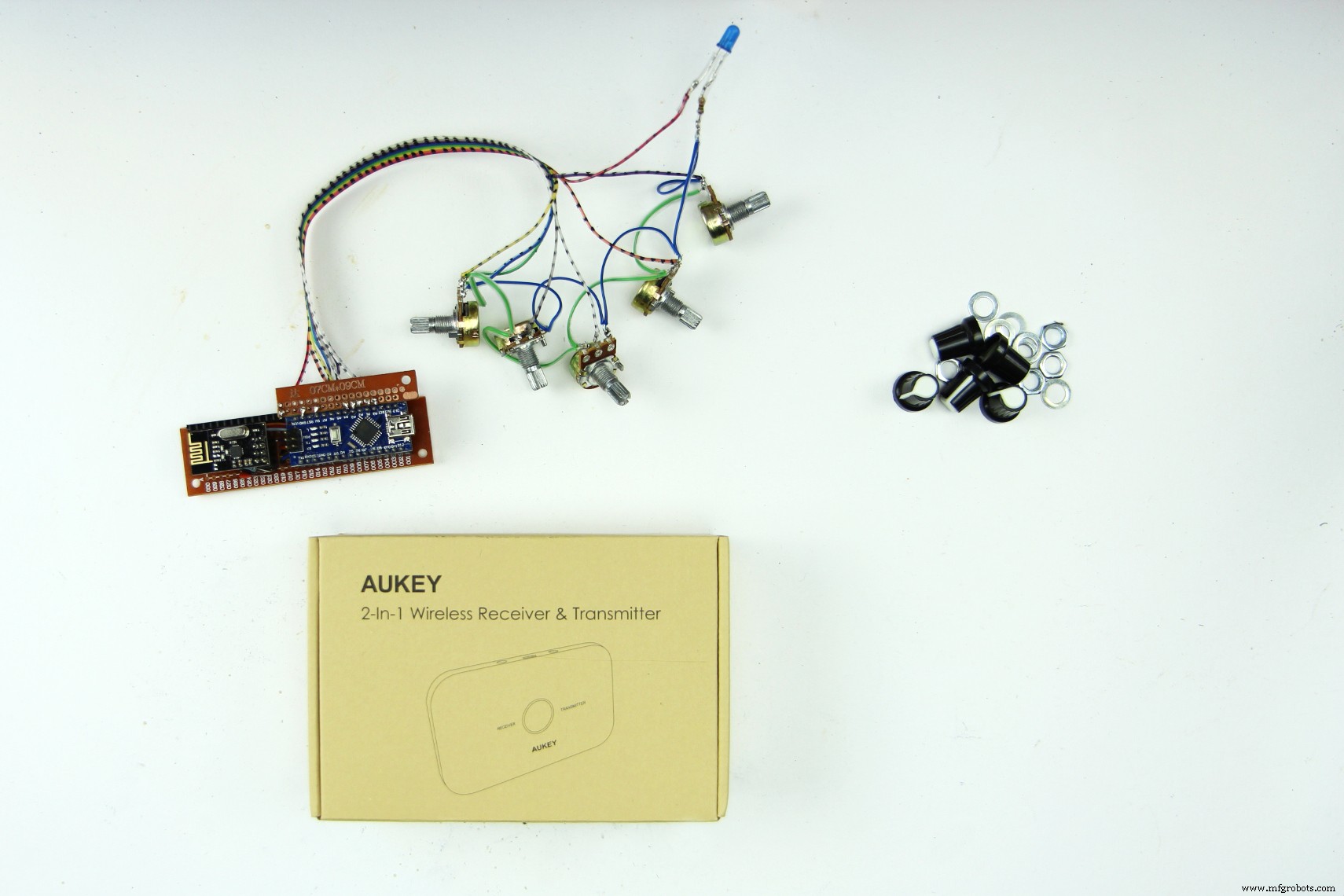
{1x} 50*24 홀(최소 크기) Perfboard, {5x} 40핀 암 헤더, {5x} 40핀 수 헤더, {5x} 10킬로옴 전위차계 및 노브, {3x} 파란색 5mm 표준 LED, {3x} 150 Ohm 저항, {2x} 10 마이크로 패러드 커패시터, {2x} 100 나노 패럿 커패시터, {2x} NRF24L01 무선 송수신기, {2x} Arduino 나노, {3x} 220 Ohm 저항, {2x} MPR121 터치 센서 보드, {1x} GY-521 MPU 6050 디지털 자이로스코프, {2x} USB-A - USB-C 케이블, {1x} 4미터(최소) 1cm 너비 구리 테이프, {1x} 파워뱅크, {2x } 다양한 색상의 7미터(최소) 와이어 및 선택적으로 {1x} 0, ø=3mm 수축튜브 2미터
또한 구성 요소를 조립하는 도구가 필요합니다.
나중에 빈 판지 상자 또는 이와 유사한 것:

그리고 인클로저를 만들기 위한 풀, 글루건, 접착 테이프, 하나 이상의 클램프 및 고무 밴드:

2부 – 컨트롤러 보드 만들기
다음으로 위에서 언급한 부품에서 컨트롤러 전자 장치를 단계별로 만드는 방법을 설명하겠습니다.
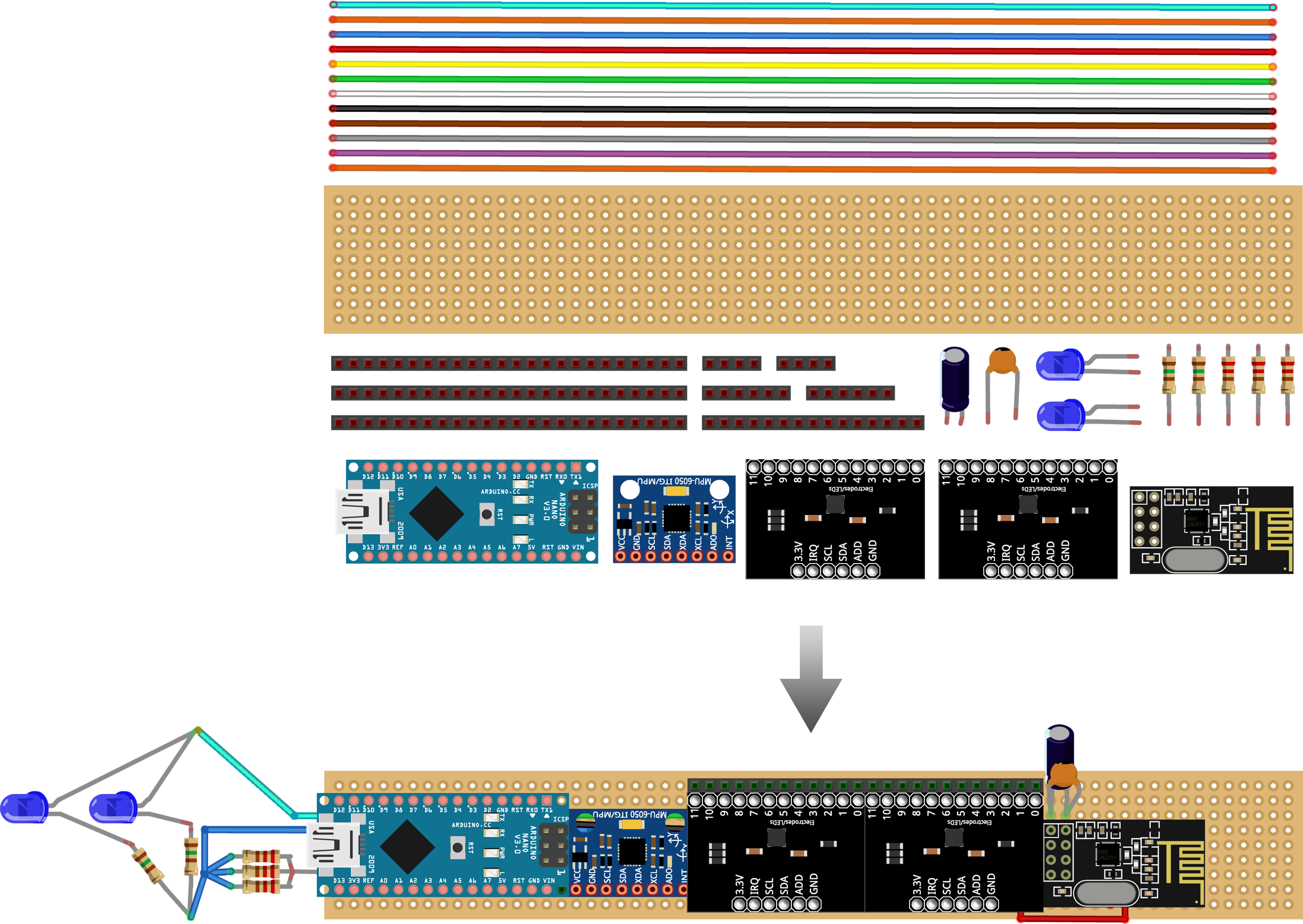
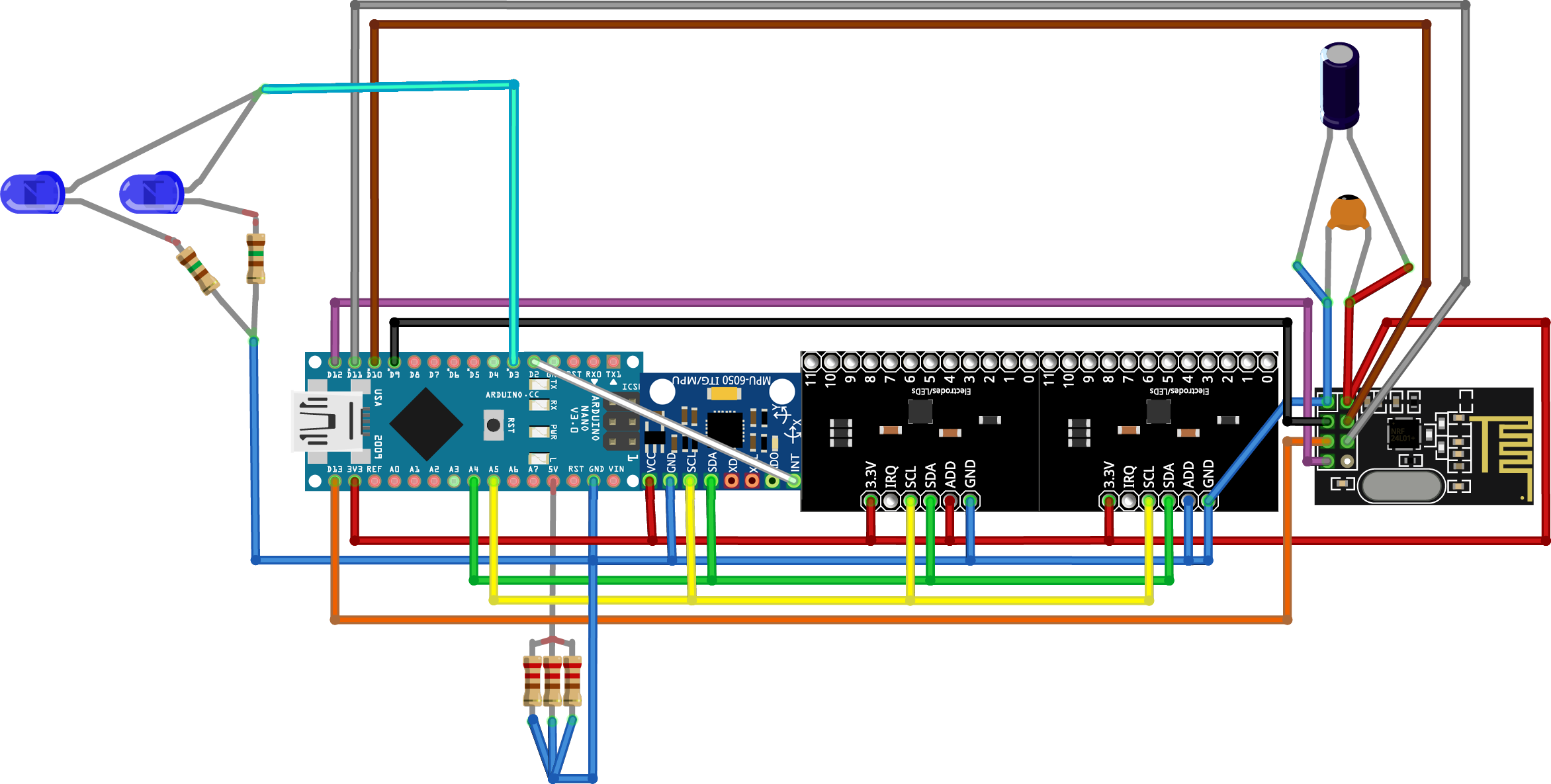
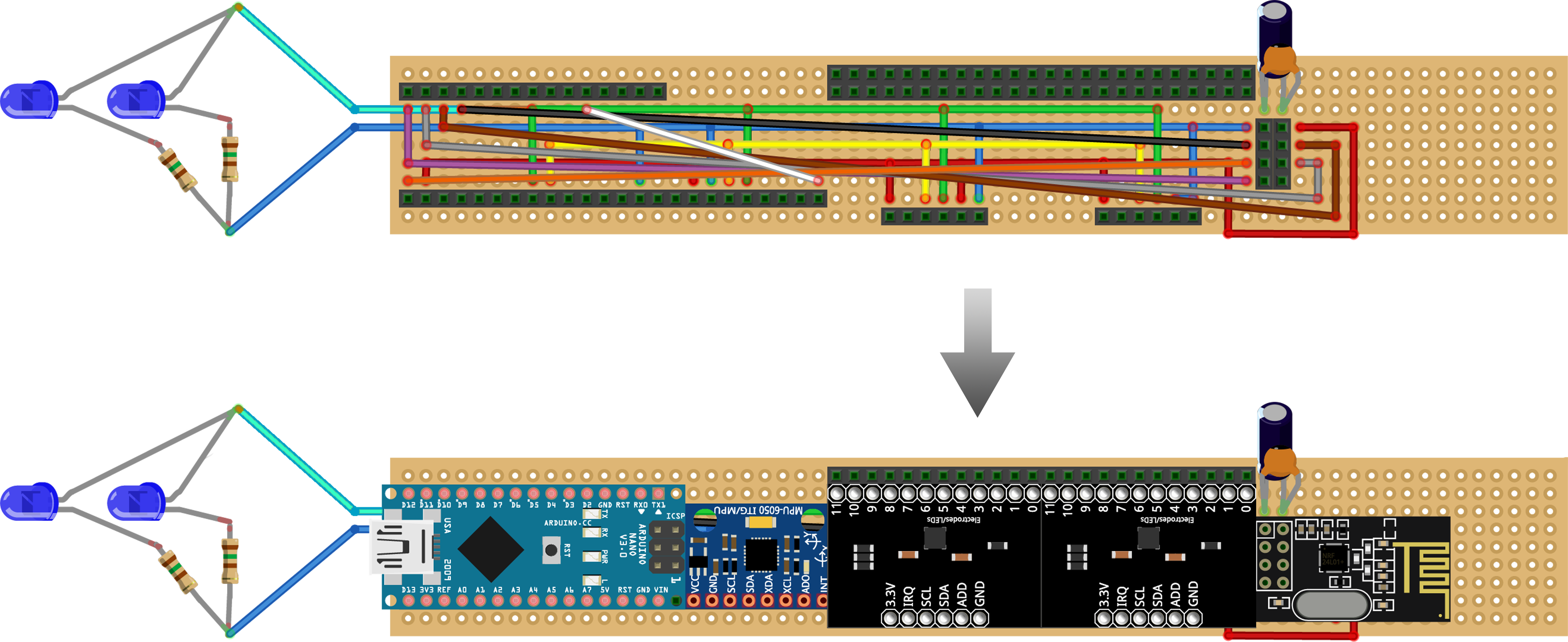
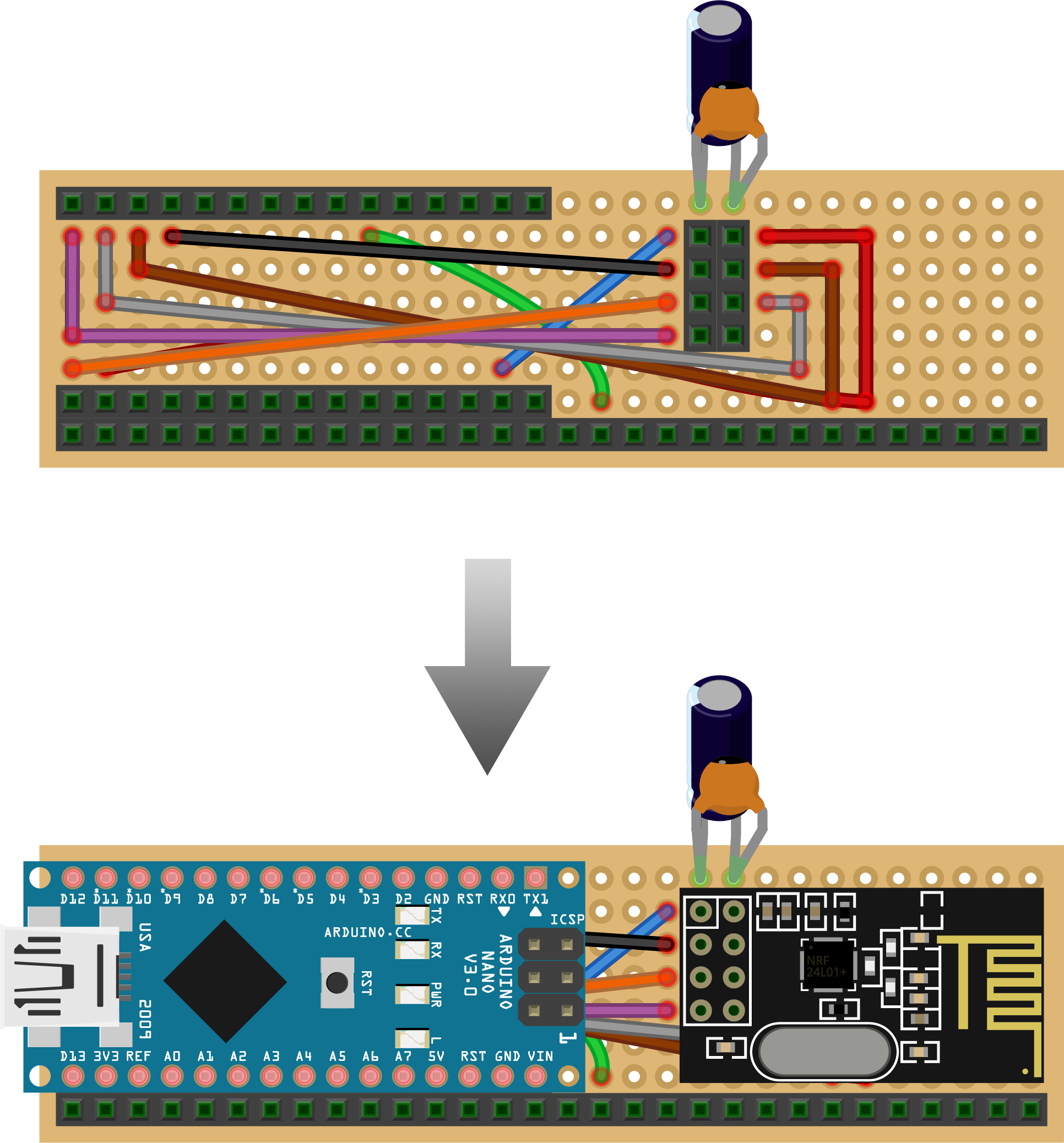
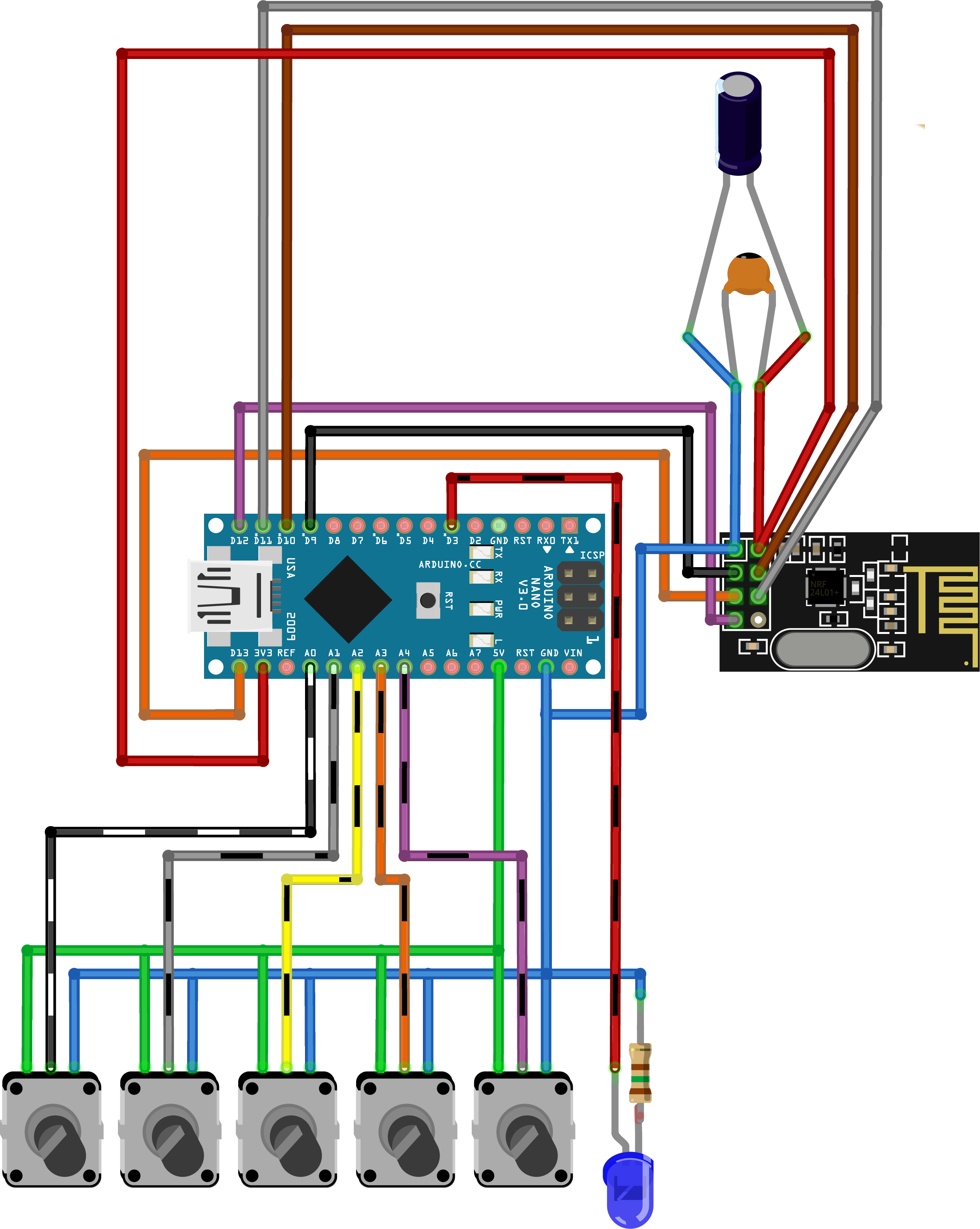
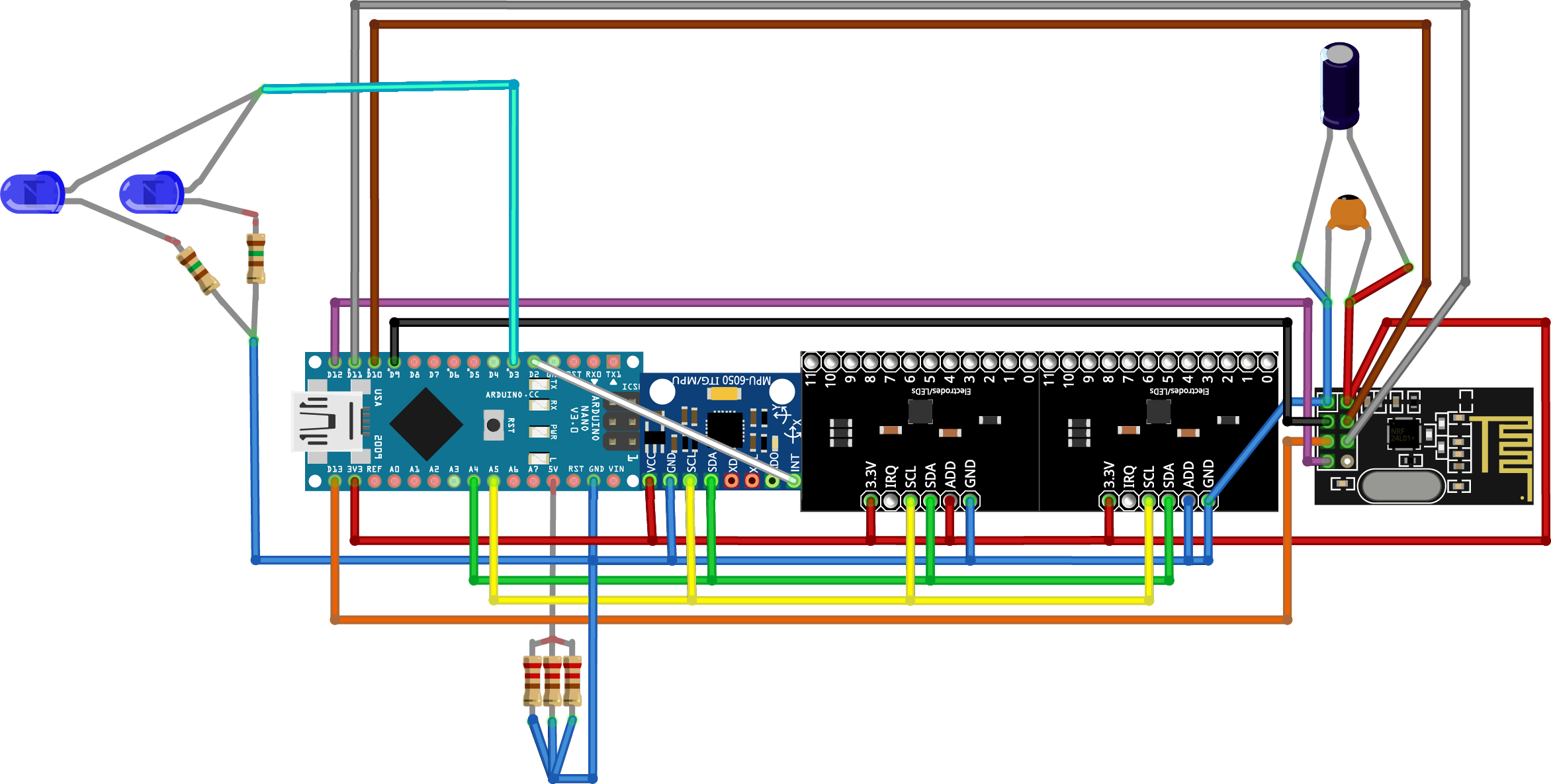
케이블의 납땜 위치가 확실하지 않은 경우 arduino와 센서 보드를 우리가 만들고 있는 회로 기판에 부착한 후 항상 아래 회로도로 돌아와 구성 요소가 올바르게 연결되는지 확인할 수 있습니다.
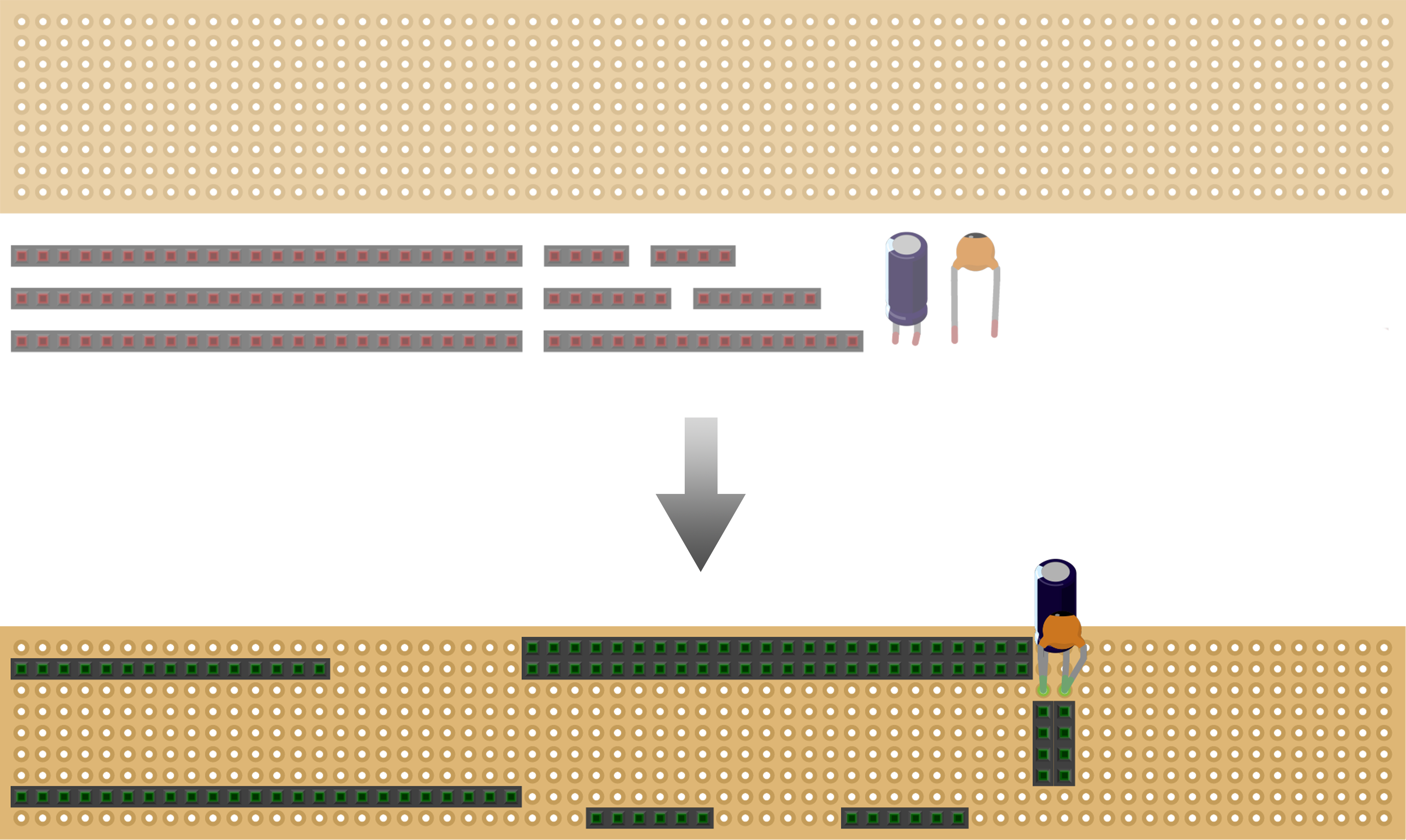
2.1
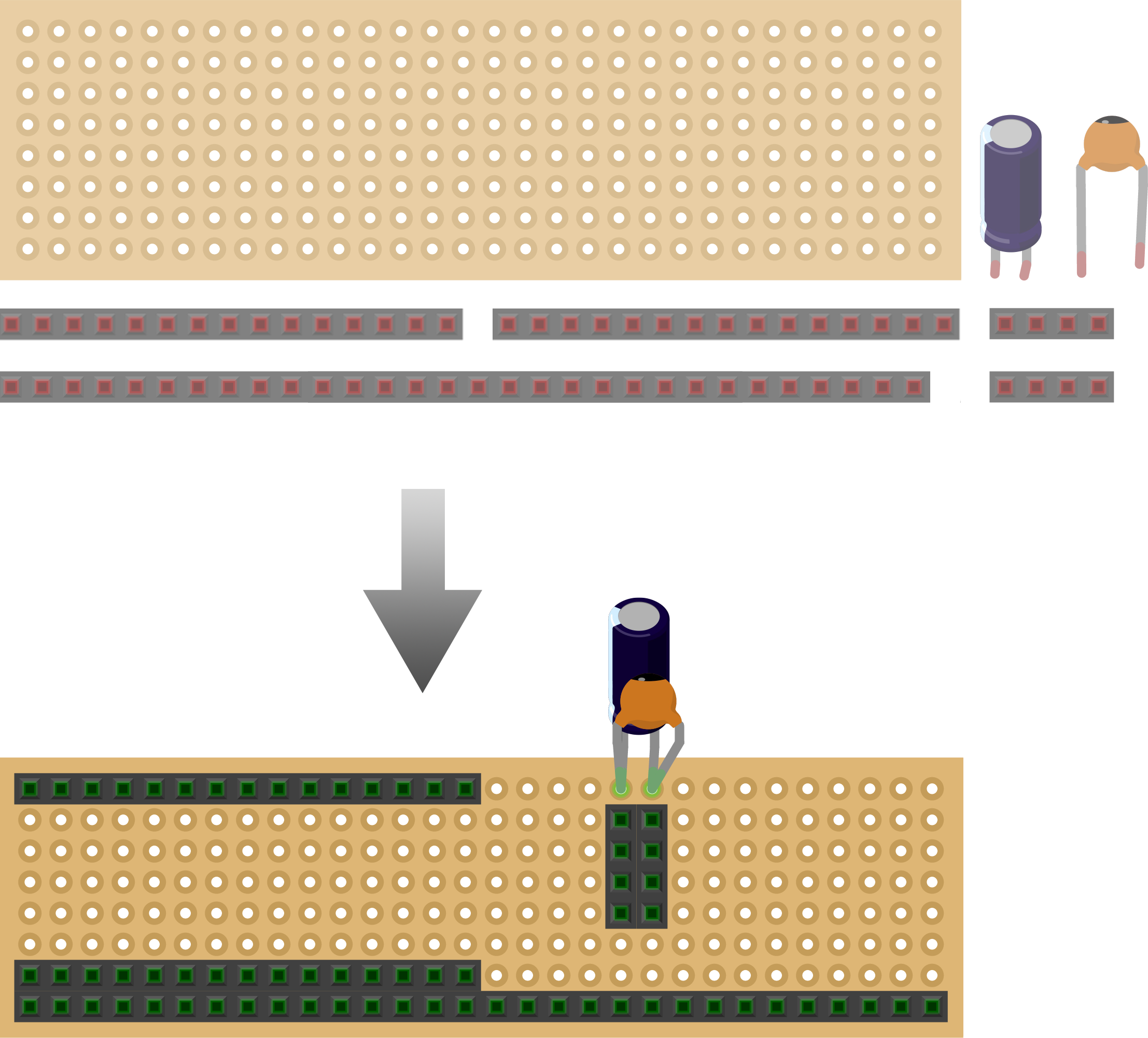
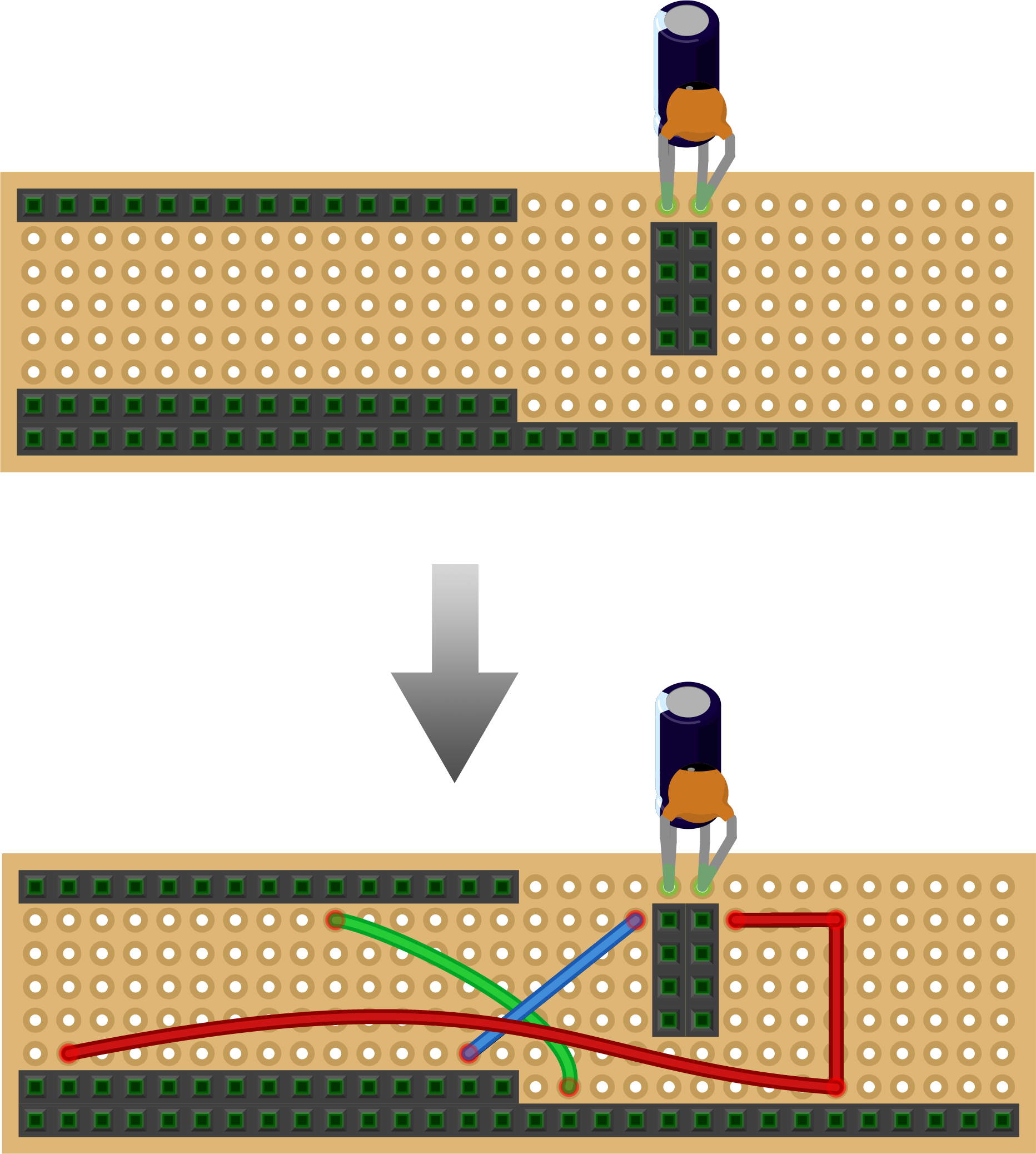
첫 번째 단계는 perfboard와 암 핀 헤더를 크기에 맞게 자르고 무선 송수신기의 신뢰성을 높이는 데 도움이 되는 크고 작은 커패시터와 함께 조립하는 것입니다.
다용도 칼로 perfboard를 자르십시오:

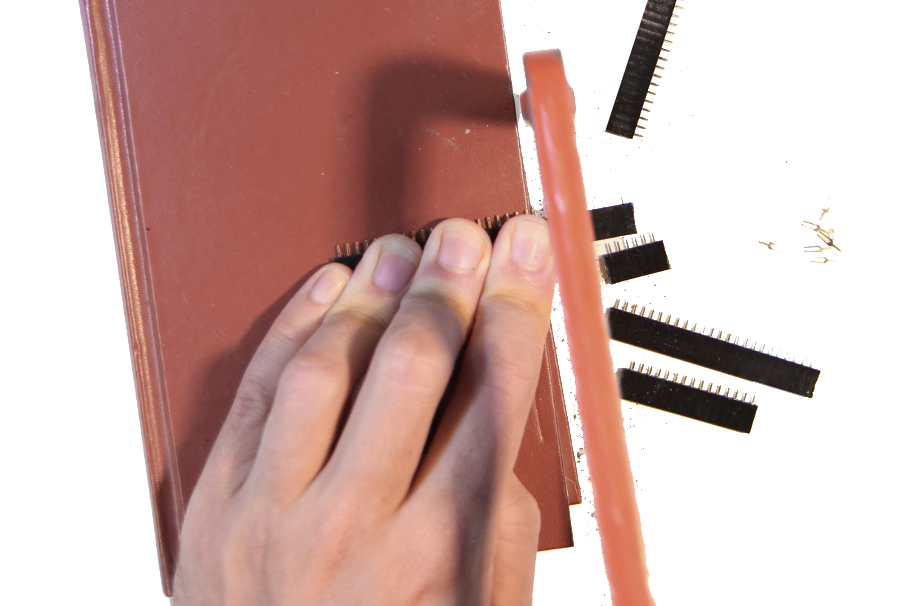
쇠톱으로 암나사 핀 헤더를 자릅니다(책상 위에 올려 탁상에서 수평을 맞춥니다):
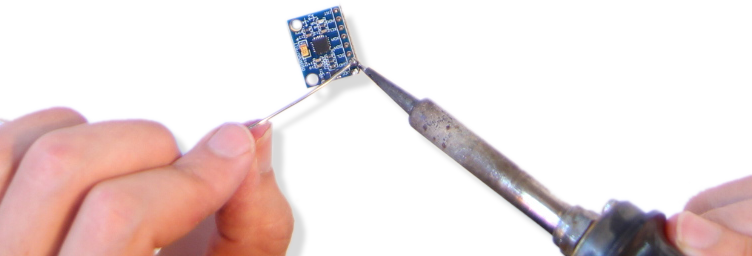
부품을 납땜합니다. 서로 옆에 있는 두 개의 긴 암 헤더의 각 핀 쌍을 이미 연결할 수 있습니다. 나머지 헤더의 경우 약간의 땜납으로 간단히 부착하는 것으로 충분합니다. 바람직하게는 나중에 어쨌든 연결되지 않는 회로도에 따라 핀이 있는 것이 좋습니다. 커패시터를 납땜할 때 전해 10마이크로패럿 커패시터(둘 중 큰 쪽)의 극성에 주의하십시오. 한쪽에는 줄무늬가 있고 일반적으로 다리가 더 짧습니다. 그 쪽은 접지에 연결해야 합니다. 더 작은 100나노 패럿 커패시터는 극성이 없으며 어느 쪽이든 납땜할 수 있습니다.
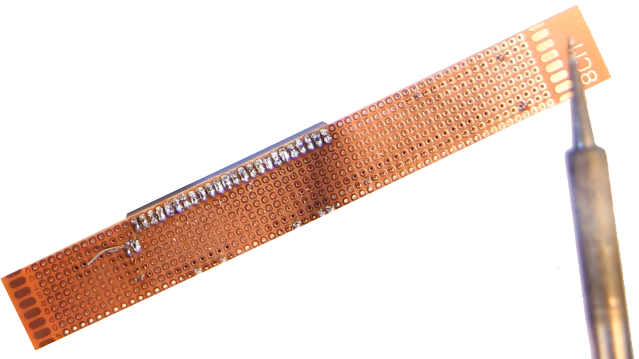
결과는 다음과 유사해야 합니다.

2.2
두 번째 단계는 전류 제한 저항으로 두 개의 LED를 납땜하는 것입니다.
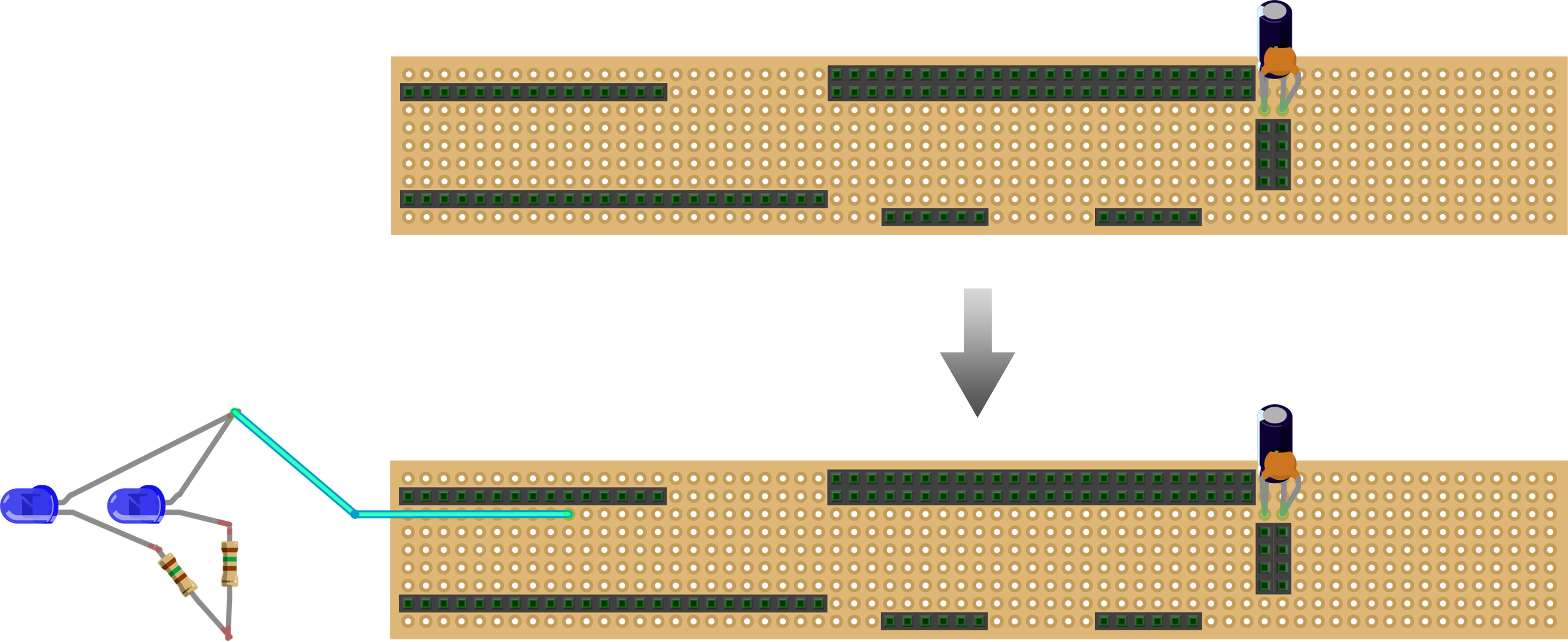
LED의 극성에 주의하십시오. LED의 한 면은 평평하며 일반적으로 다리도 더 짧습니다. 그 쪽은 2.3단계에서 접지에 연결해야 합니다. 다른 쪽은 이제 시안색 케이블을 사용하여 나중에 꽂았을 때 Arduino 핀 D3이 앉을 잭에 연결합니다.
2.3
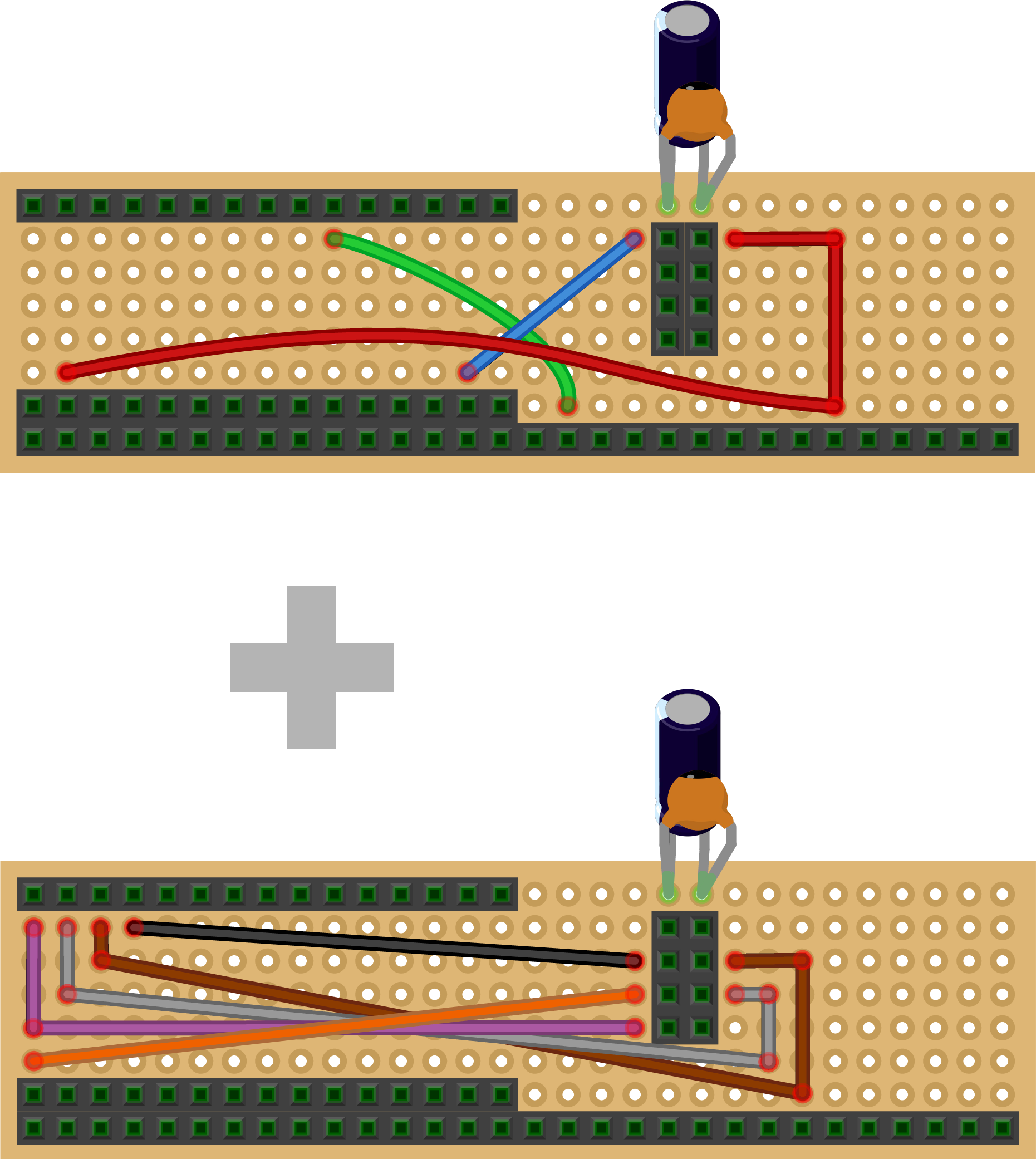
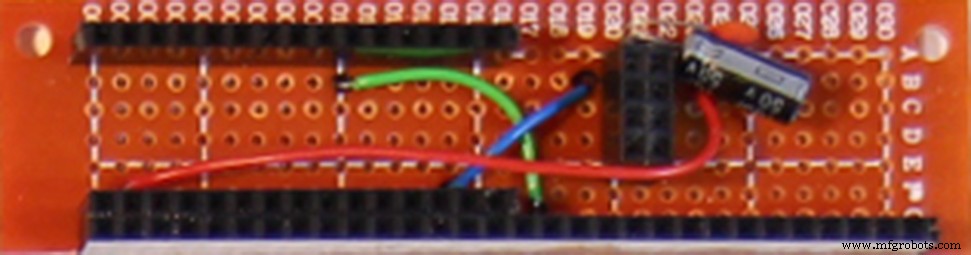
다음으로 모든 빨간색 및 파란색 전원 공급 장치 케이블을 추가합니다. 빨간색은 3.3볼트용이고 파란색은 접지용(GND)
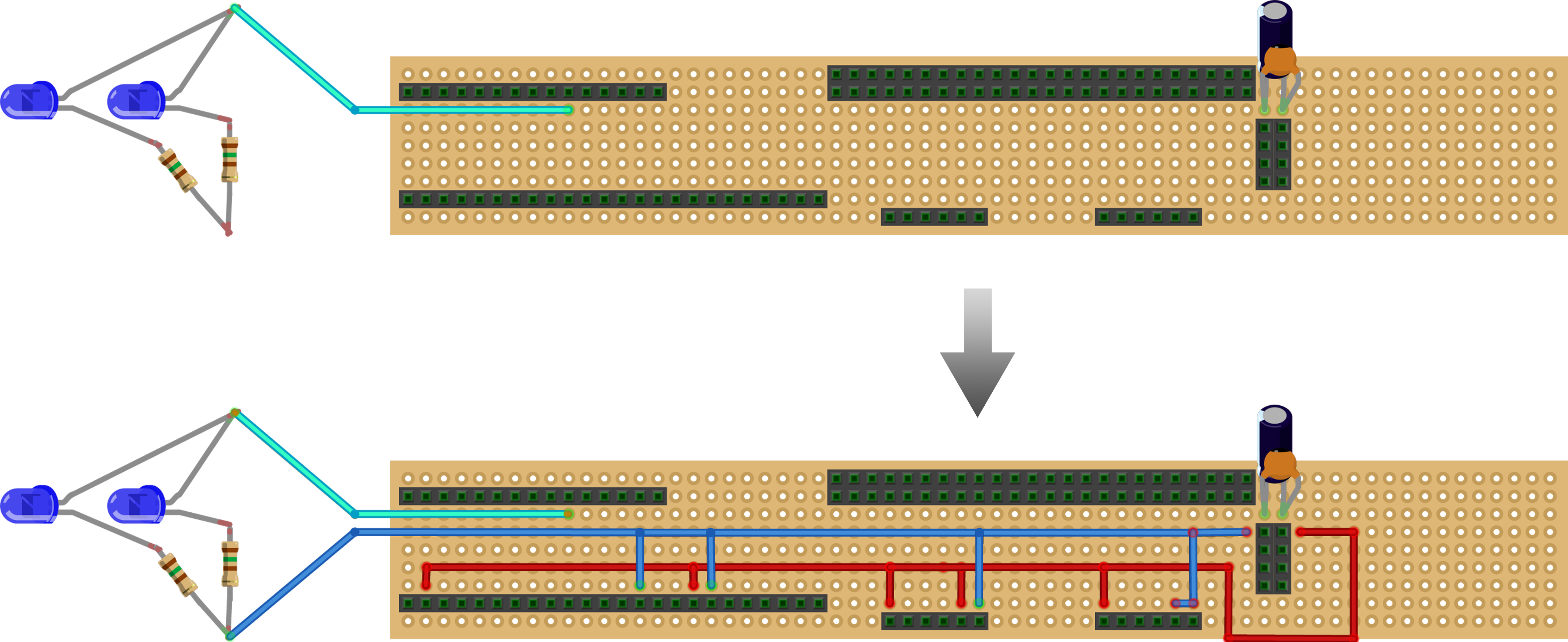
결과는 다음과 유사해야 합니다.
2.4
네 번째 단계에서는 이미 게시판에 약간 붐비고 있습니다. 3개의 센서 보드는 I2C 프로토콜(inter-integrated circuit)을 통해 통신합니다. 즉, 동일한 두 개의 Arduino 핀에 모두 연결할 수 있으므로 Arduino 핀 A4 및 A5 사이에 노란색 및 녹색 케이블을 납땜합니다. 또한 자이로스코프의 인터럽트 핀 연결을 위한 흰색 케이블도 추가합니다.
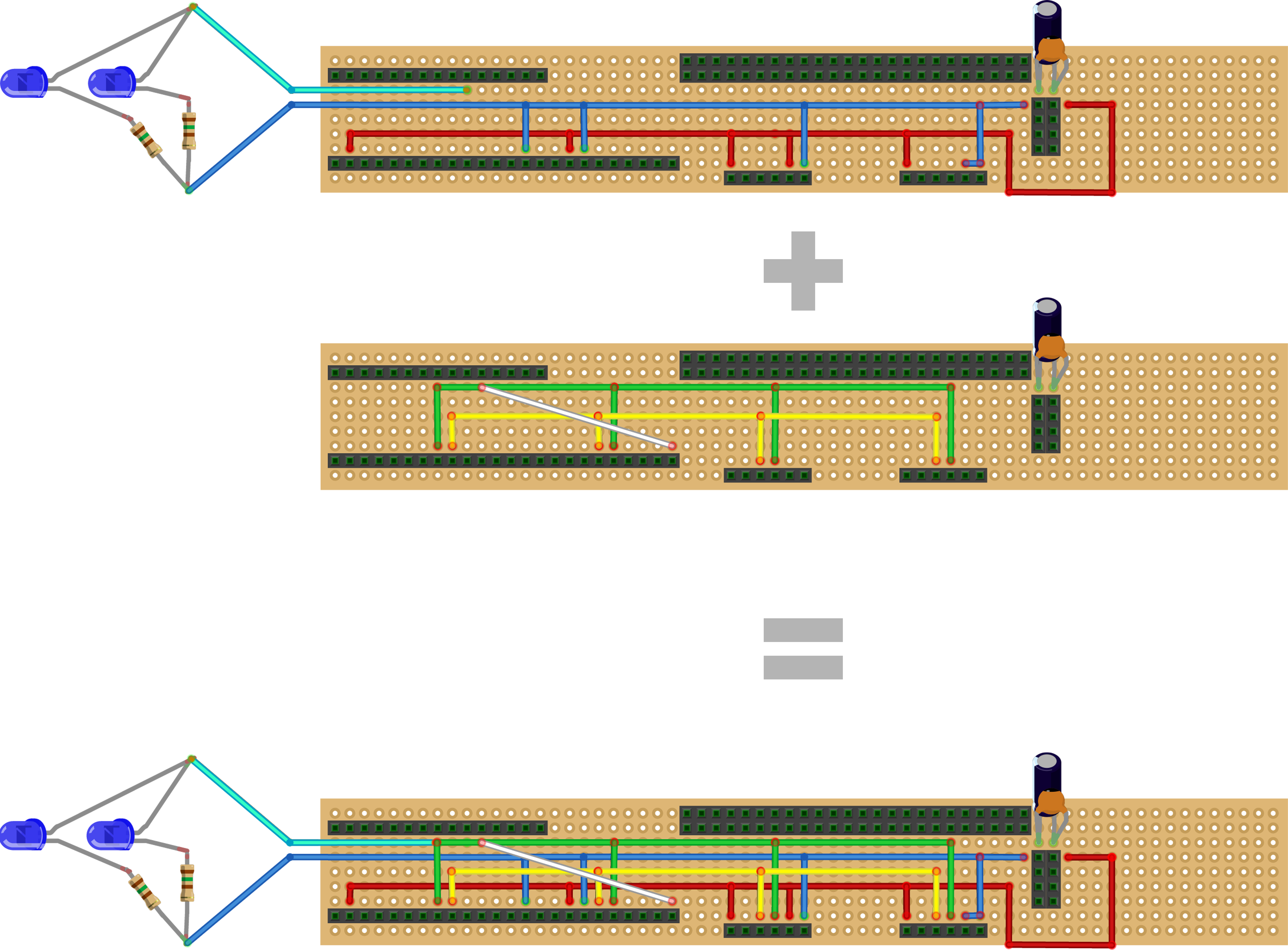
이 작업이 완료되면 보드는 다음과 같습니다.
2.5
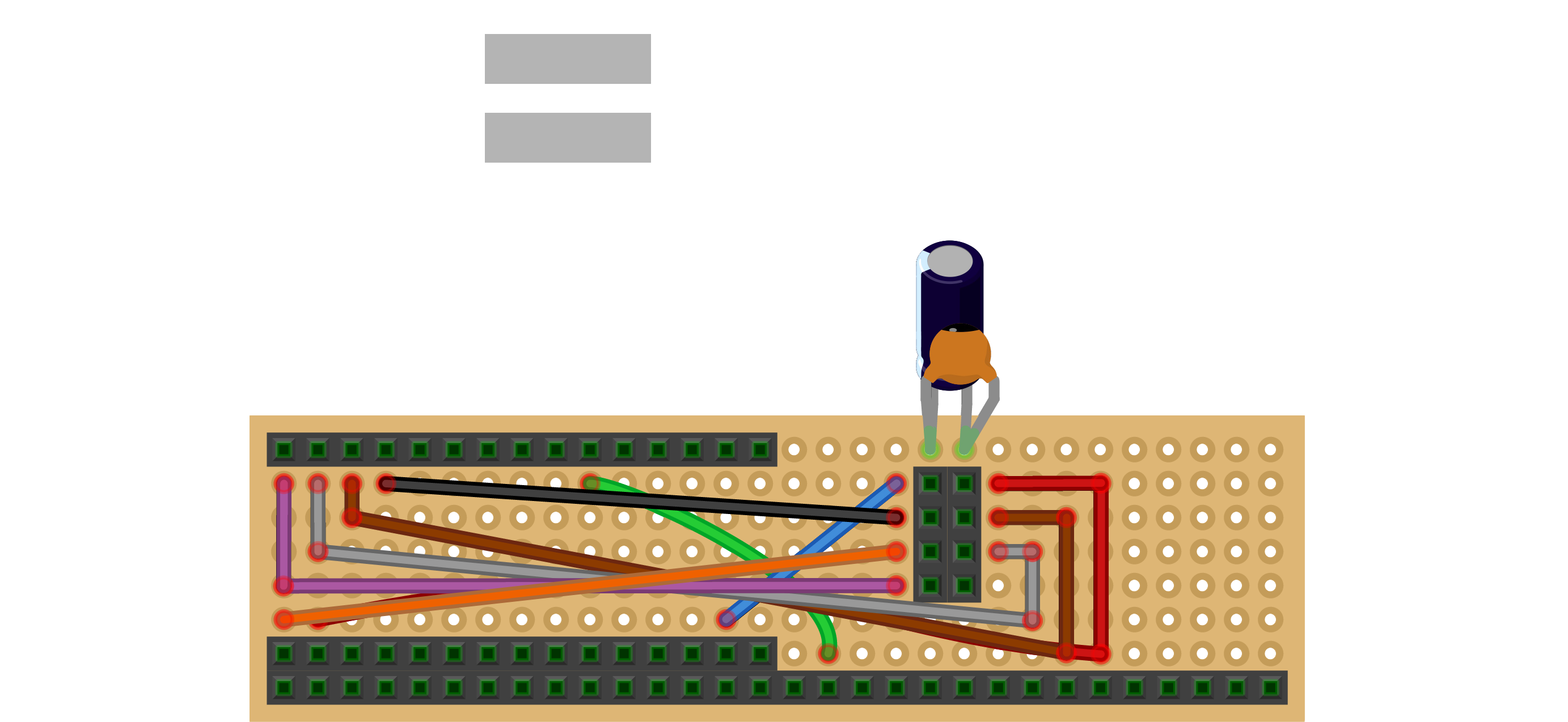
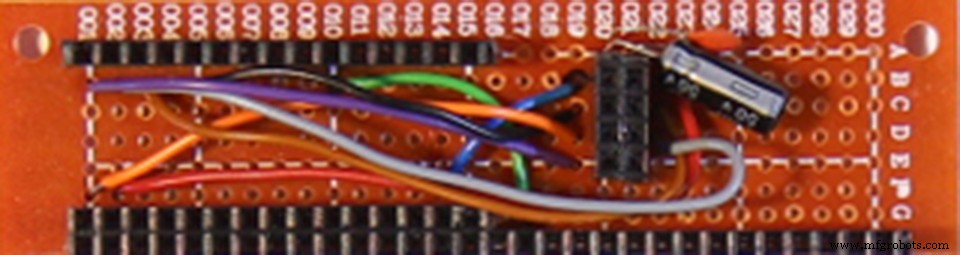
무선 송수신기는 I2C보다 더 많은 연결이 필요한 대신 SPI 프로토콜(직렬 주변기기 인터페이스)을 통해 통신하므로 검정색, 회색, 갈색, 보라색 및 주황색 케이블을 추가합니다.
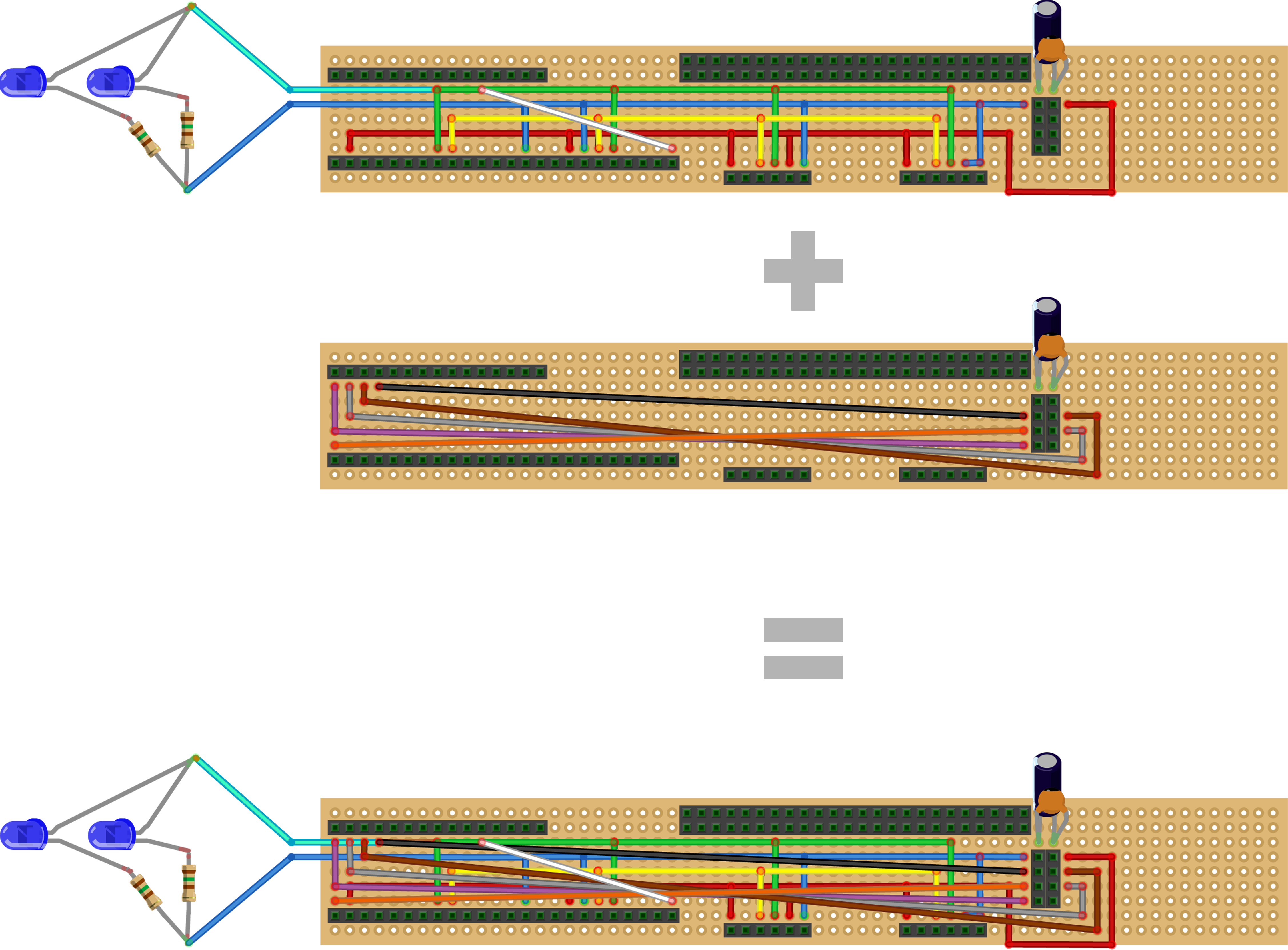
얻을 수 있는 것은 다음과 같습니다.
2.6
이제 구성품을 준비할 차례입니다.
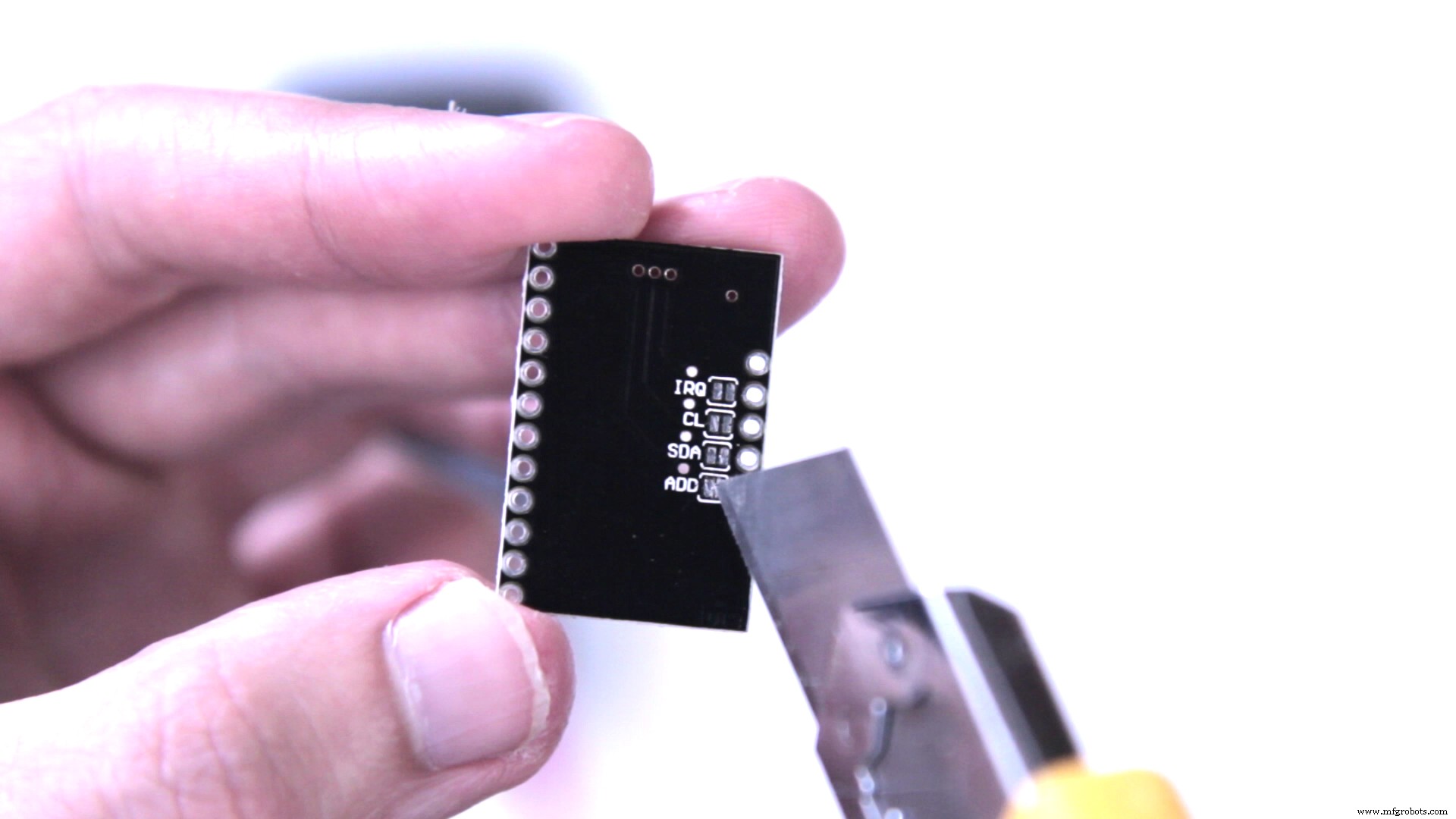
수컷 핀 헤더가 사전 납땜되지 않은 경우 납땜하는 것과 별도로 터치 센서 보드에 특별한 주의를 기울이십시오! 중국의 저렴한 모델에는 풀다운 저항 없이 접지에 고정 배선된 주소 핀이 있으므로 만능 칼로 보드 바닥에서 이 연결을 물리적으로 절단해야 합니다. ADD가 쓰여진 곳 옆에 있는 두 개의 솔더 패드 사이를 자릅니다. 나중에 패드 사이에 연결이 남아 있지 않은지 확인하기 위해 멀티미터를 사용하는 것이 좋습니다.
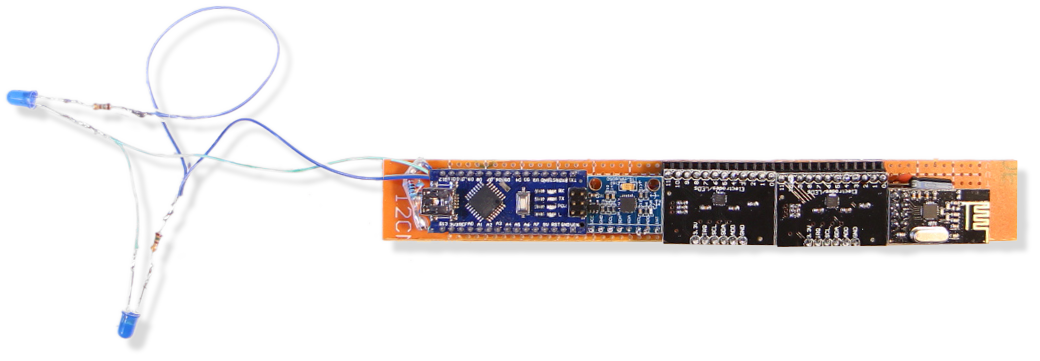
모든 구성 요소에 핀 헤더가 납땜되어 있고 터치 센서 보드가 준비되면 Arduino Nano, 자이로스코프, 두 개의 터치 센서 보드 및 무선 송수신기를 컨트롤러 보드에 연결할 수 있습니다.
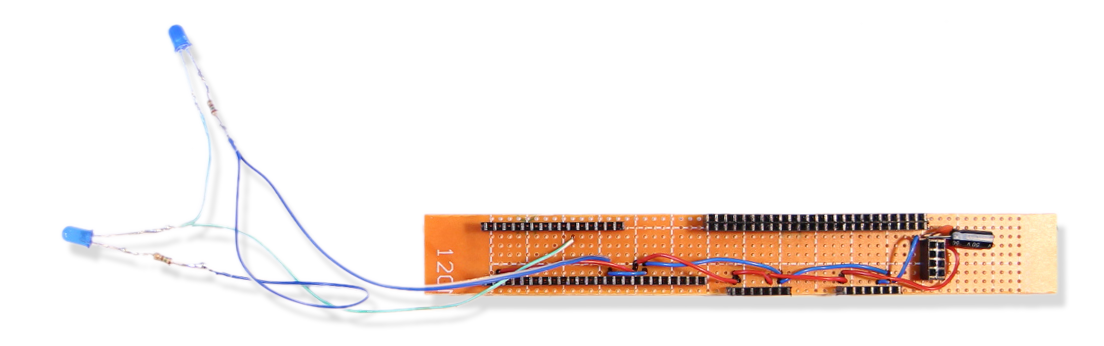
(아마도) 완성된 컨트롤러 보드:

2.7
다시 한 번 확인한 후 모든 것이 올바르게 배선되었는지 확인하고 다음 단계는 제공된 Kravox-Controller 코드(첨부 파일 참조)를 Arduino nano에 업로드하는 것입니다. 그러나 그렇게 하기 전에 자이로스코프용 라이브러리를 설치해야 합니다. 터치 센서 보드 및 무선 송수신기. Arduino 라이브러리를 처음 사용하는 경우 여기에서 설치 방법을 알아보세요.
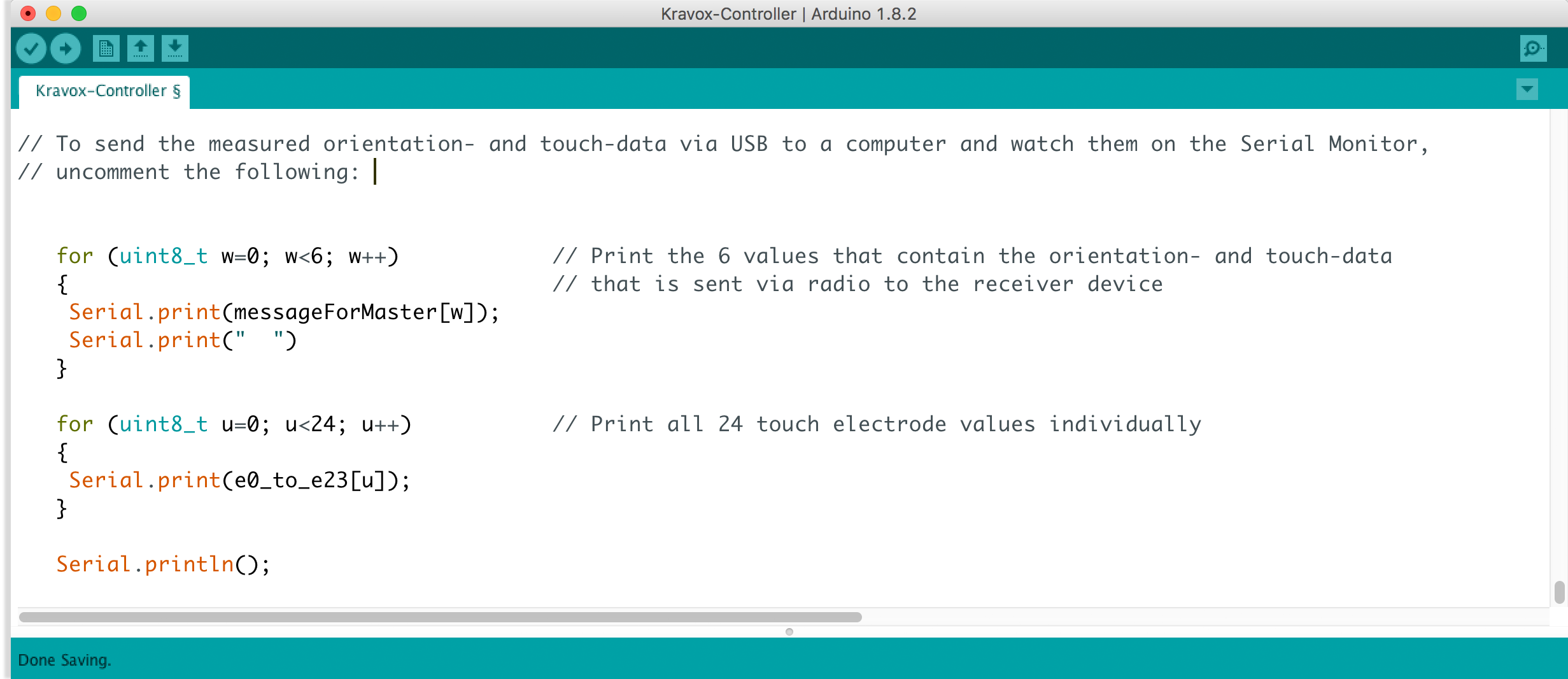
<울>라이브러리가 설치되자마자 Kravox-Controller 코드를 업로드할 수 있습니다. 컨트롤러가 작동하는지 이미 확인하고 싶다면 직렬 모니터를 통해 터치 센서와 자이로스코프의 데이터를 출력하도록 할 수 있습니다. 이를 위해서는 댓글을 제거해야 합니다. 업로드 전 수신자 코드의 마지막 섹션:

시작( /* )과 끝( */ )에 있는 주석 표시를 삭제하여 코드가 다음과 같이 보이도록 합니다.
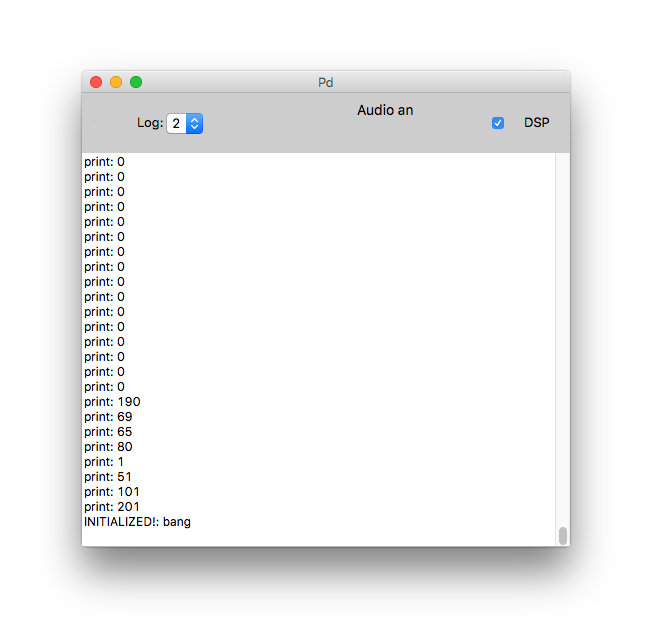
해당 변형이 있는 코드를 업로드한 후 직렬 모니터를 열고 115200의 전송 속도(데이터 전송 속도)로 설정합니다. 이제 컨트롤러 보드를 이동하고 핀을 터치할 때 변경되는 센서의 데이터를 볼 수 있어야 합니다. 0에서 11까지 레이블이 지정된 MPR121 보드 중
아무 것도 작동하지 않거나 0만 표시되면 배선을 주의 깊게 확인하고 위의 회로도와 비교하십시오. 직렬 모니터에서 재미있는 출력이 나오면 올바른 전송 속도로 설정했는지 확인하세요.
2.8
컨트롤러 보드를 함께 사용하려는 파워뱅크에 연결합니다.
보드(또는 더 정확하게는 파워뱅크)가 일정 시간 후에도 자동으로 꺼지지 않으면 컨트롤러 보드가 완료된 것이며 파트 3으로 진행할 수 있습니다! 그렇지 않으면 2.9단계를 수행하십시오.
2.9
원칙적으로 컨트롤러 보드는 완료되지만 일부 파워 뱅크는 지금과 같이 컨트롤러 보드에 연결하면 몇 초 후에 자동으로 꺼집니다. 너무 적은 에너지를 소비하기 때문입니다.
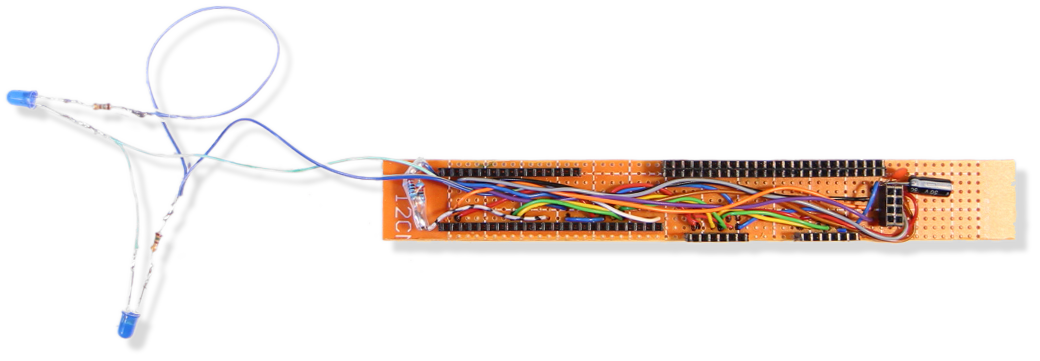
더티 픽스로 Arduino의 5V 및 GND 핀 사이에 3개의 220 Ohm 저항을 병렬로 추가할 수 있습니다. 이러한 저항은 추가 에너지를 발산하고 열로 변환하므로 컨트롤러는 전원 은행이 켜져 있을 수 있을 만큼 충분히 소비합니다. 걱정하지 마십시오. 작은 보조 배터리가 있어도 충전하지 않고 며칠 동안 계속 작동합니다.
Arduino Nano를 제거하고 다음과 같이 저항에 납땜하십시오.

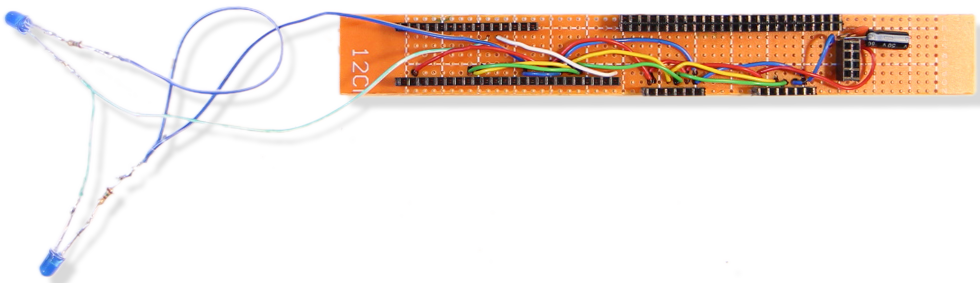
따라서 보드는 다음과 같습니다.
구성 요소를 다시 부착한 후 (확실히) 완성된 컨트롤러 보드는 다음과 같습니다.
3부 – 수신기 보드 만들기
튜토리얼의 이 부분에서는 수신기 보드를 만드는 방법을 보여 드리겠습니다. 이 과정은 컨트롤러 보드를 만드는 것과 매우 유사합니다.
특정 케이블을 연결해야 하는 위치를 확인하려면 다음 회로도를 참조하세요.
3.1
첫 번째 단계는 다시 perfboard 및 암 핀 헤더를 크기에 맞게 자르고 무선 송수신기의 신뢰성을 높이는 데 도움이 되는 크고 작은 커패시터와 함께 조립하는 것입니다. 가장 낮은 암 핀 헤더는 의도적으로 필요 이상으로 길게 남겨두므로 나중에 Arduino 세분화된 Synth와 같은 다른 프로젝트에 사용할 수 있습니다. 자세한 내용은 이 단계를 2.1단계와 비교할 수 있습니다.
3.1단계 끝의 보드 사진:
3.2
다음으로 모든 빨간색 및 파란색 전원 공급 장치 케이블을 추가합니다. 빨간색은 3.3볼트용이고 파란색은 접지용(GND)
다음과 같이 표시되어야 합니다.
3.3
SPI 통신용 케이블 납땜:
3.4
구성 요소 부착:

이제 수신기 보드가 완성되었지만 첨부 파일의 Kravox-Receiver 코드를 Arduino Nano에 업로드하려면 먼저 수신기에 대한 인터페이스를 만들어야 합니다.
4부 – 수신기 인터페이스 만들기
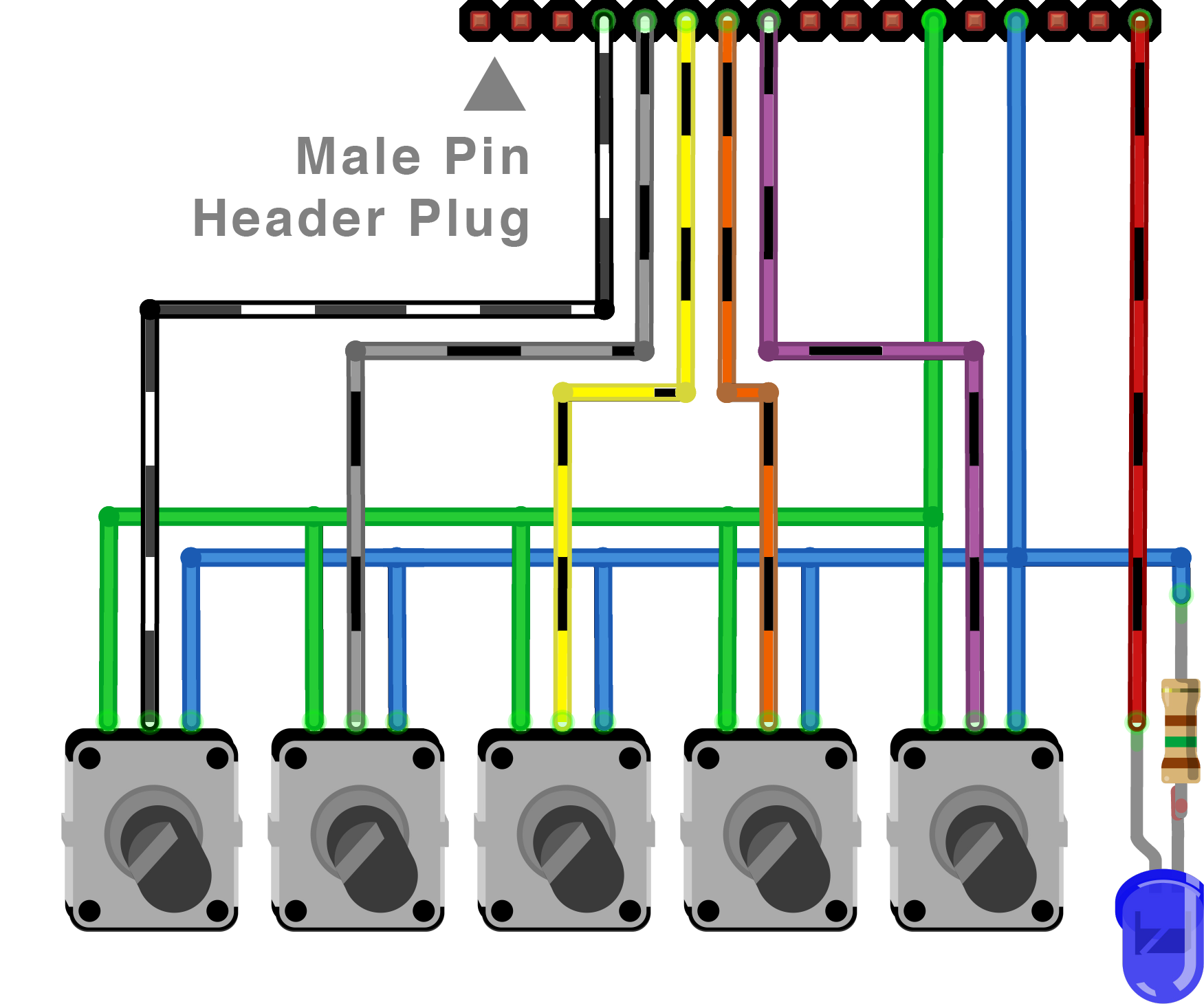
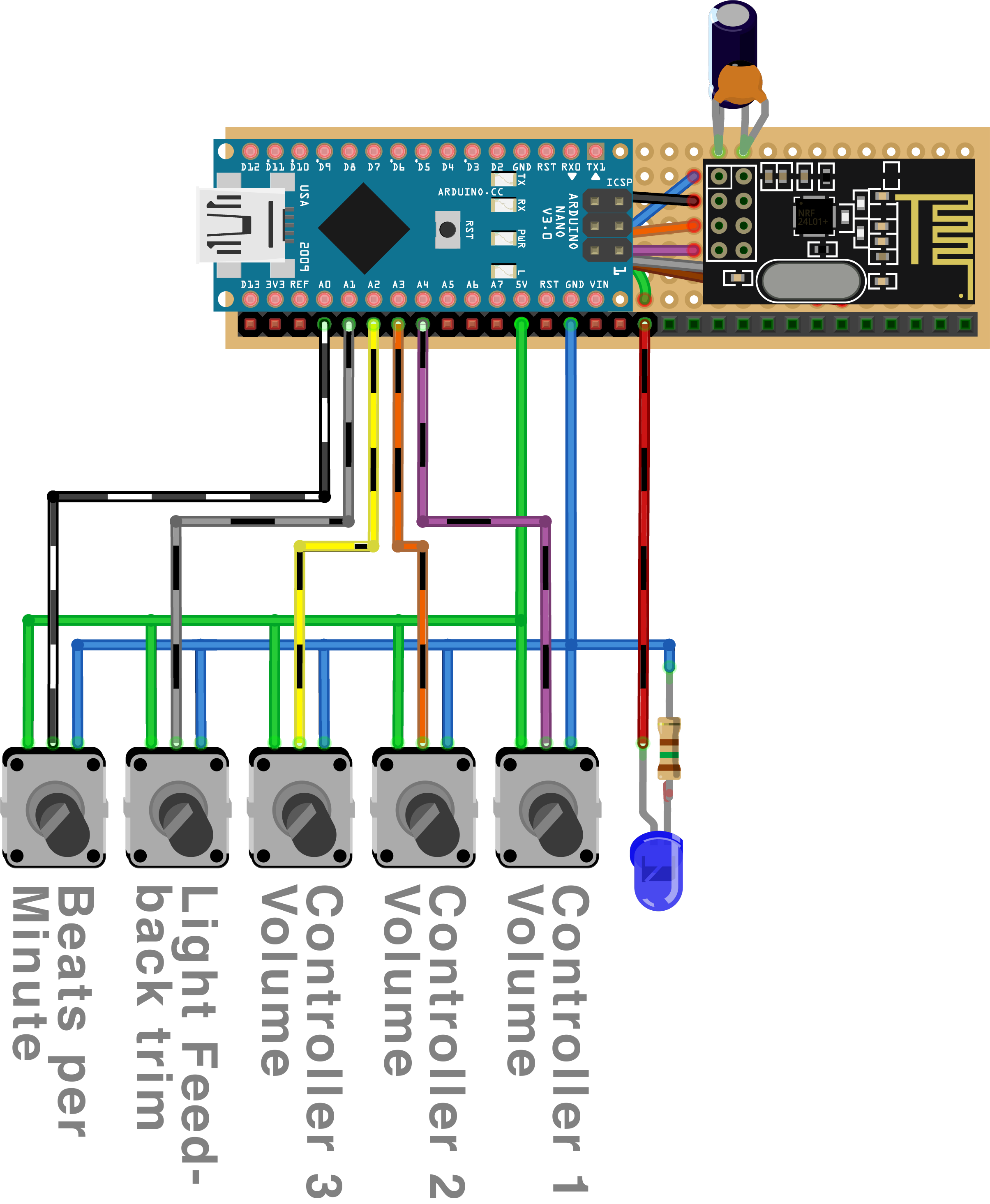
튜토리얼의 이 부분에서는 4개의 전위차계와 수신기용 LED를 사용하여 인터페이스를 만드는 방법을 보여줍니다. 인터페이스는 다음과 같이 연결됩니다.
그리고 다음과 같이 수신기 보드에 연결됩니다.
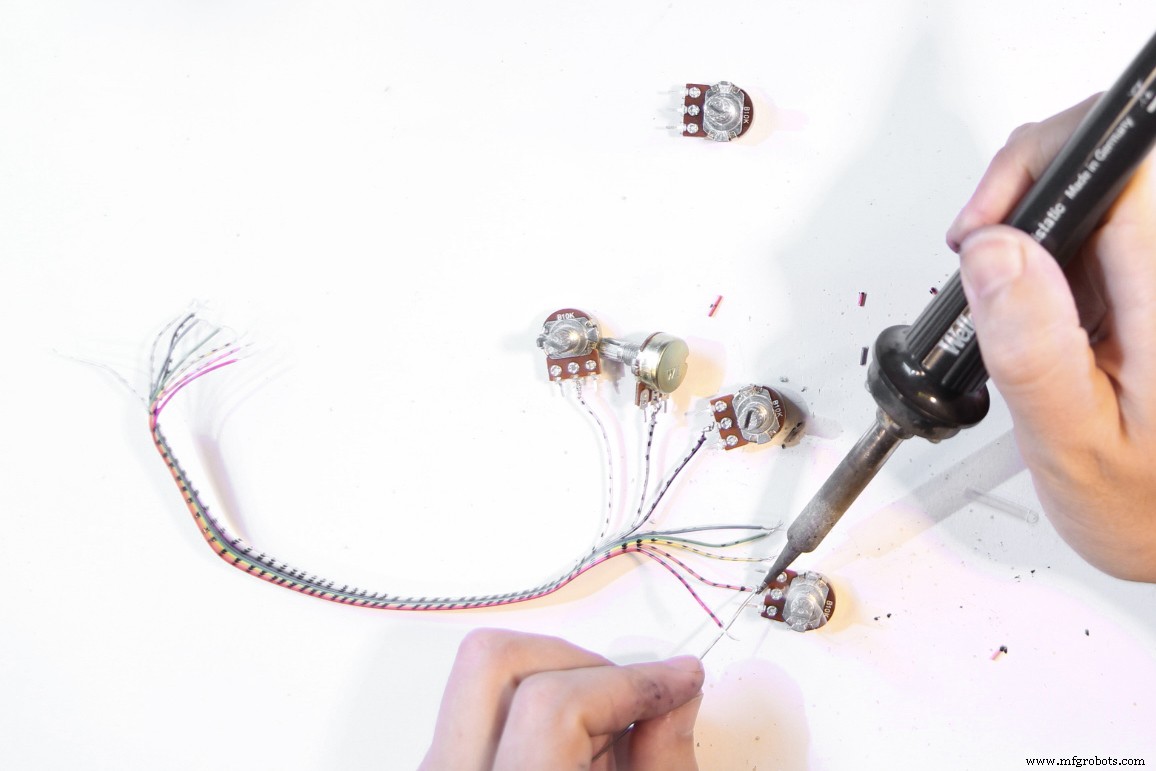
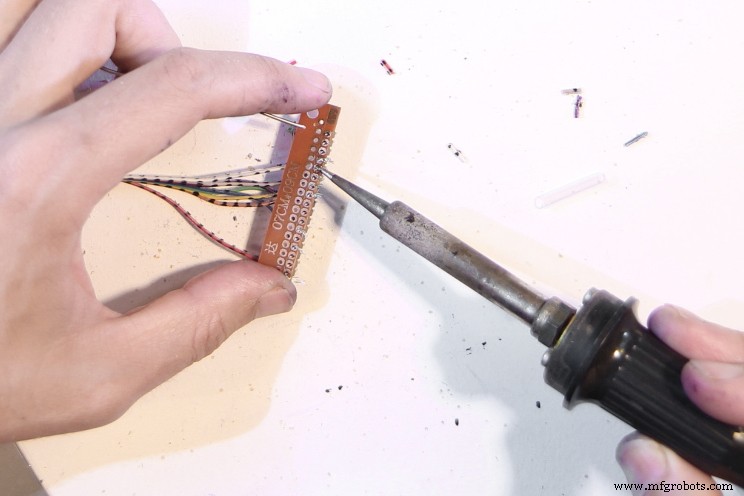
다음과 같이 진행하십시오. 먼저 8개의 케이블로 구성된 케이블 가닥을 취하고 그 중 5개를 전위차계의 중간 핀에 납땜합니다. 혼동되지 않도록 동일한 색상을 사용하는 것이 좋습니다.
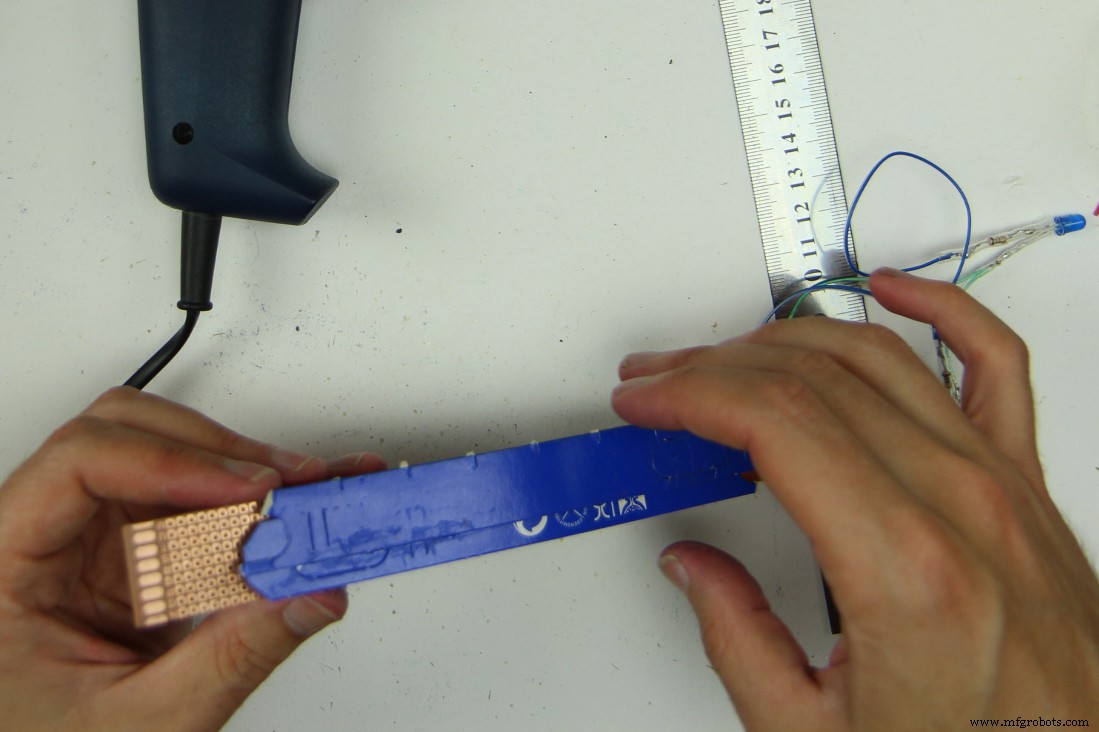
다음으로 2 * 17 홀 너비의 퍼프보드와 17 핀 수 핀 헤더를 크기에 맞게 자릅니다.

케이블과 핀 헤더를 보드에 연결합니다. 위의 회로도에 주의하여 케이블을 올바른 위치에 연결했는지 확인하십시오.
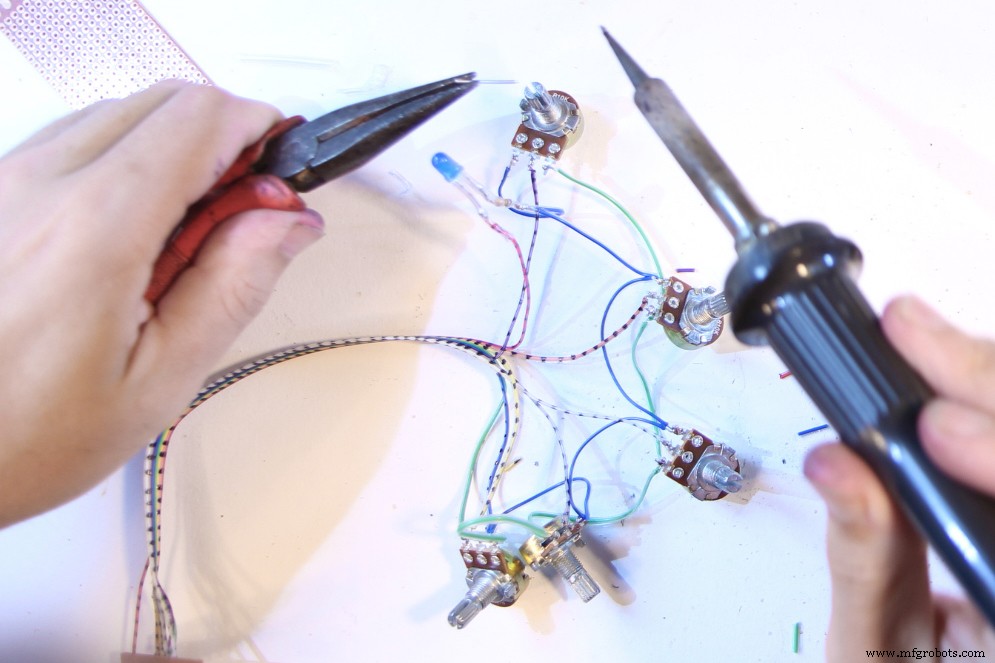
이제 모든 전위차계의 한쪽을 파란색 접지 연결 케이블로 연결합니다(그리고 아마도 제가 한 것보다 약간 더 긴 케이블을 사용할 수도 있습니다). 또한 전류 제한 150옴 저항이 있는 파란색 LED를 추가합니다. 다시 LED의 극성에 주의하십시오(2.2단계와 비교)
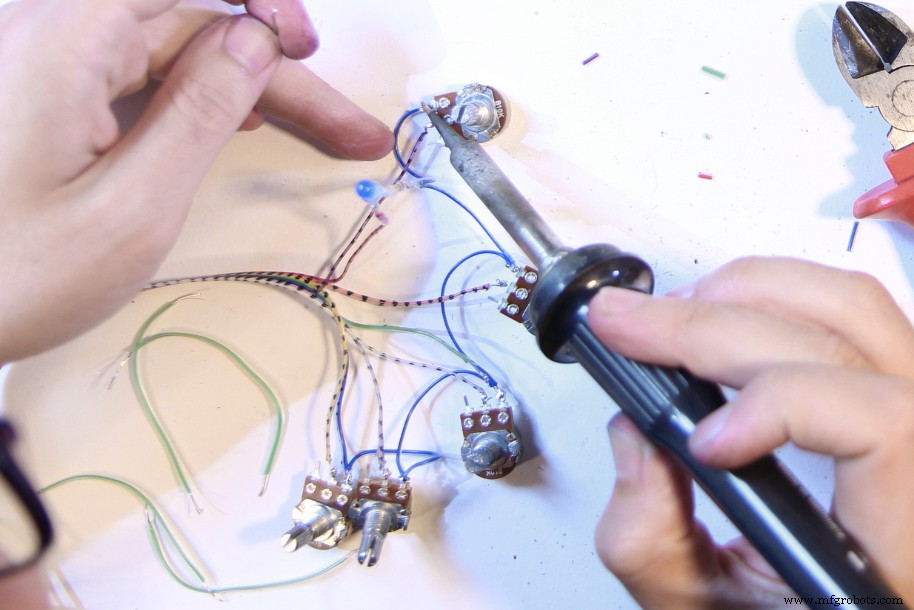
다음으로 모든 전위차계의 다른 쪽을 녹색 5V 연결 케이블로 연결합니다(나보다 약간 더 긴 케이블을 사용할 수도 있음).
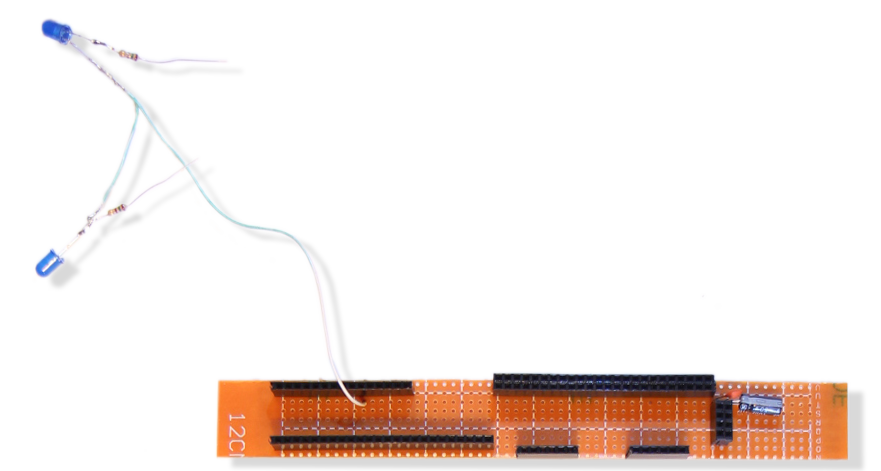
완성된 인터페이스는 다음과 같아야 합니다...
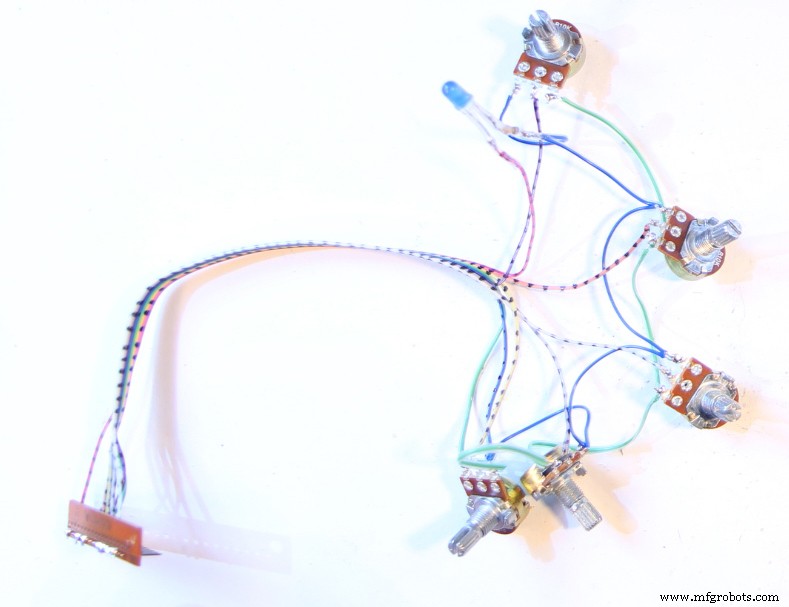
...and can be plugged into the receiver board like that:
Now you can also upload the Kravox Receiver code to the receiver's Arduino Nano.
If you want to see if it is working and receiving data from the controller, you again need to make a slight adjustment to the code before uploading. By default the Receiver will output it's data in a format that can be interpreted by pure data, but will not show useful information on the Serial Monitor. However you can change this behaviour in the code by commenting (adding // in front of) the line that says:
#define WRITE_AS_BYTES
and uncommenting (removing // in front of) the line that says:
// #define PRINT_VIA_SERIAL_MONITOR
So you turn this:
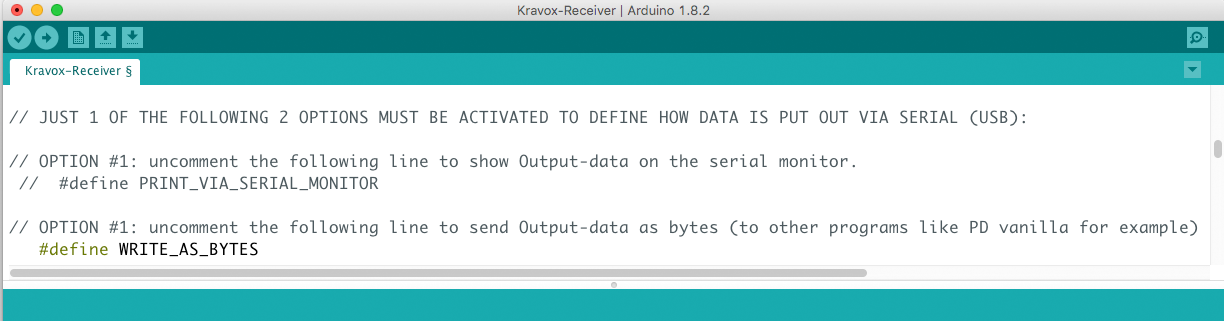
into that:
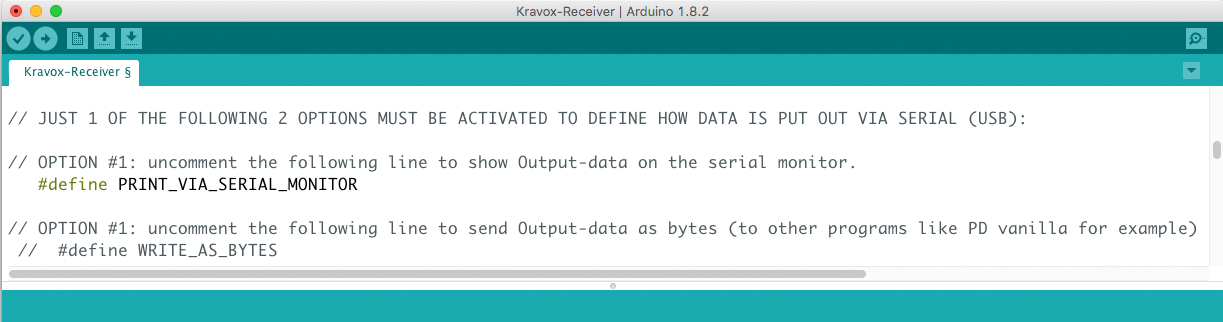
After uploading the altered code you will be able to see data from the controller and 4 of the potentiometers on the Serial Monitor as I demonstrate in this video:
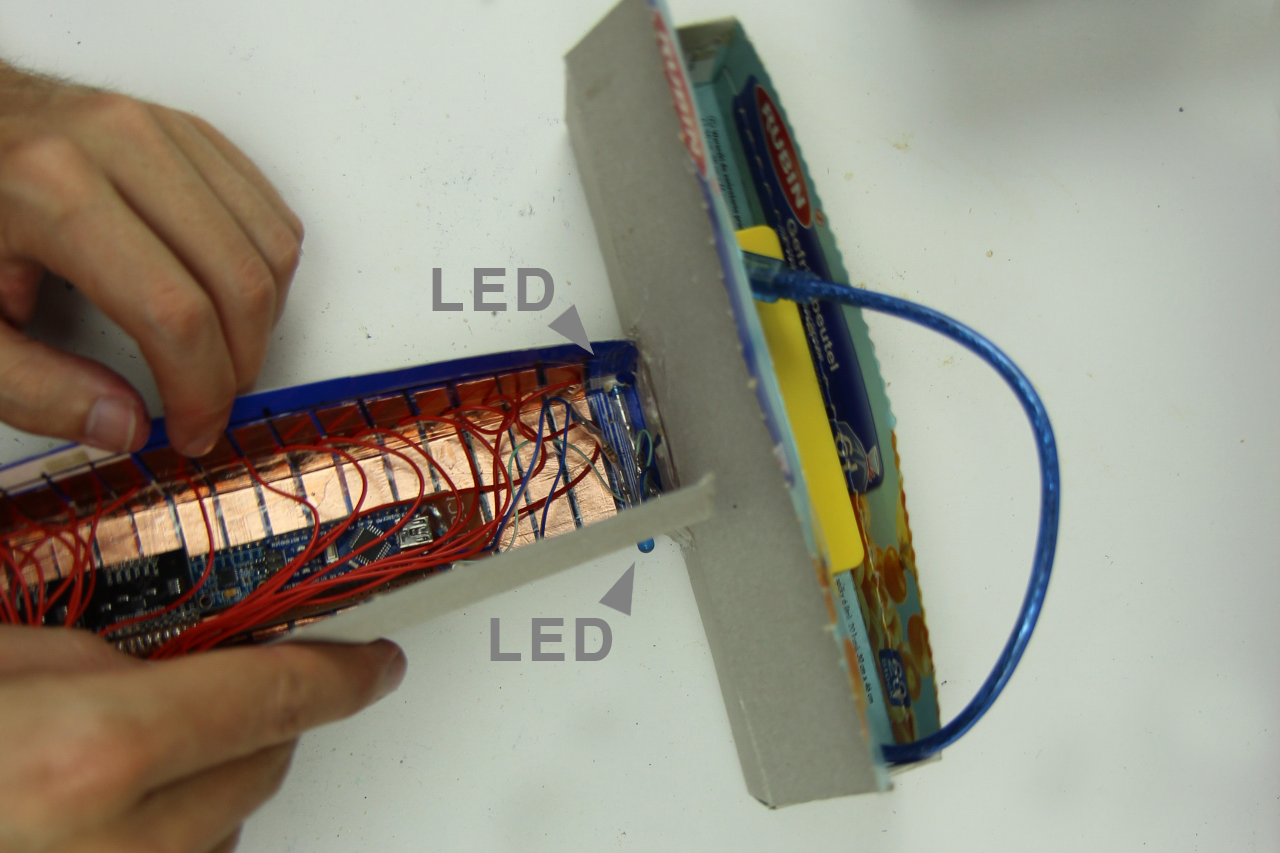
Part 5 – Making the Controller Interface + Enclosure
Like the receiver the controller also gets an interface – a touch interface that we will make from copper tape:
It will be connected to the controller board like this:
As we directly want to attach the touch interface to the controller's enclosure, you should already have the (non-conductive) material at hand that you want to make the enclosure from. I used empty boxes that cling film and plastic bags came in:

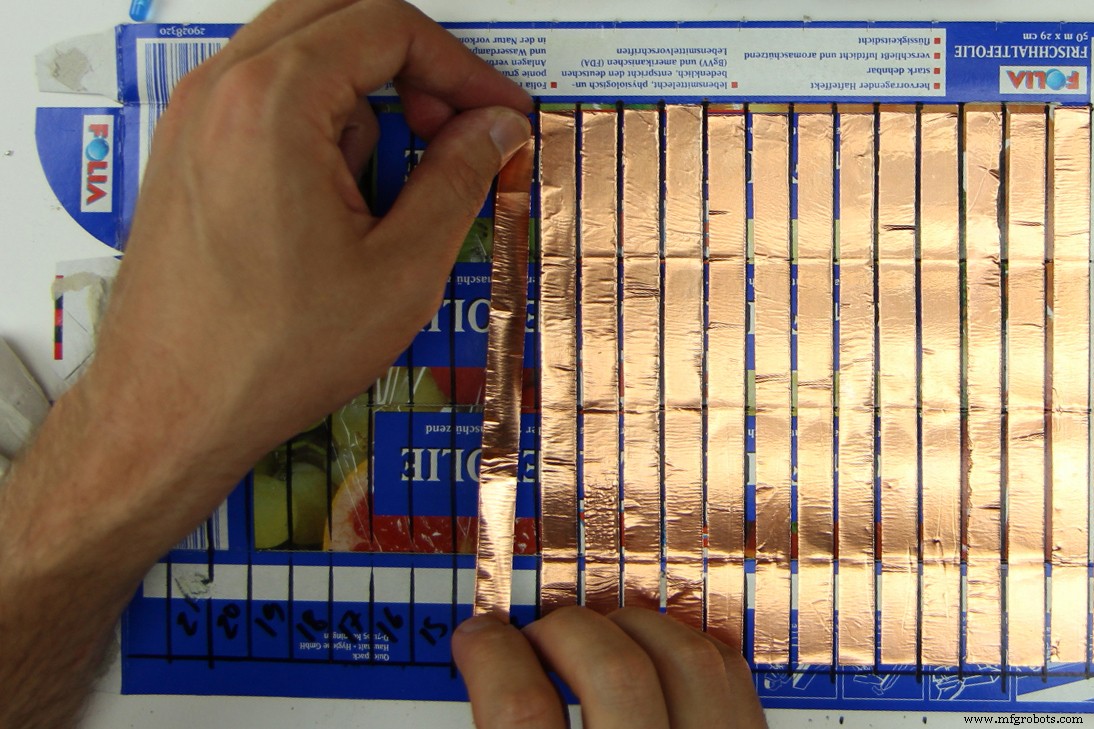
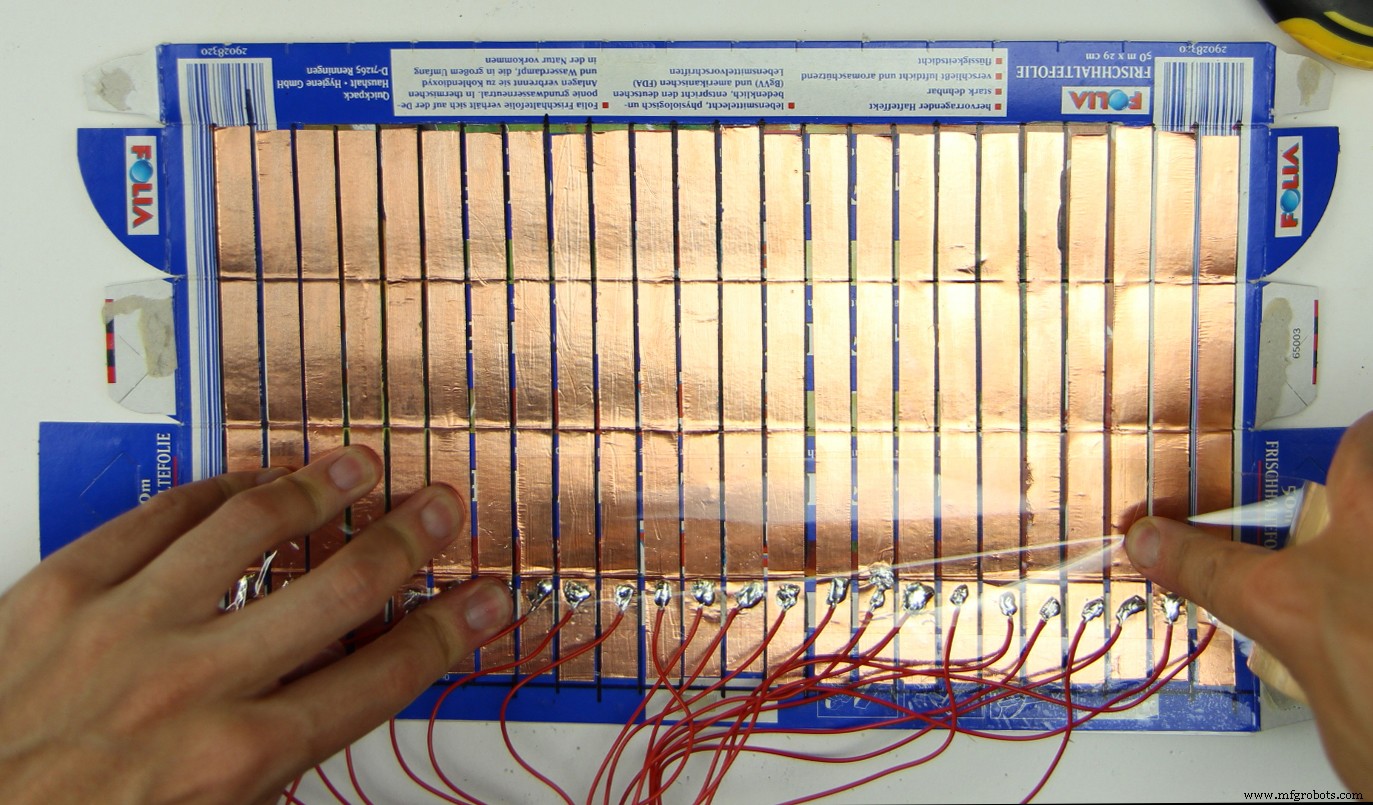
Start making the controller interface by marking where you want to attach the touch electrodes. Please note that they must not touch or overlap each other:

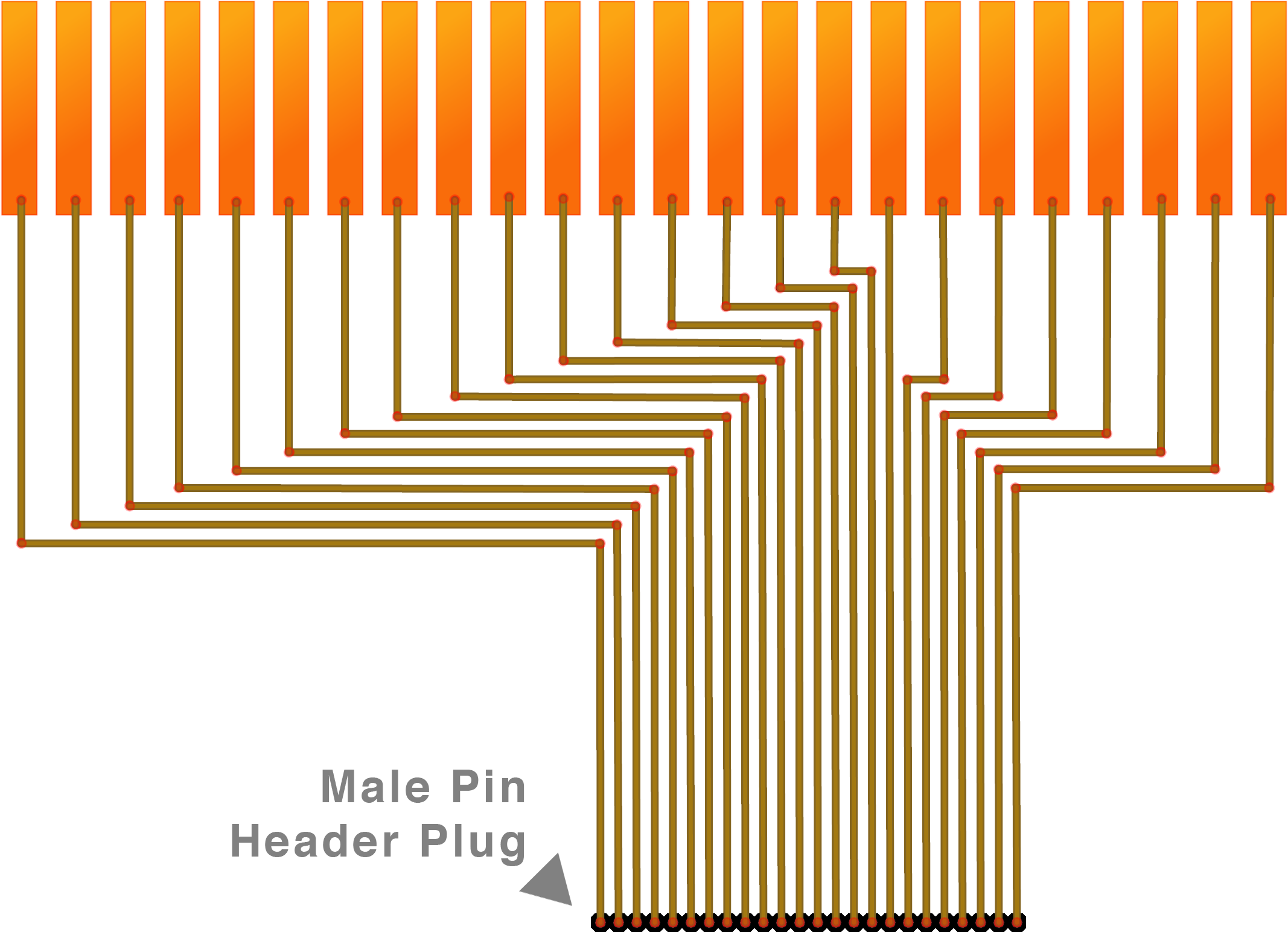
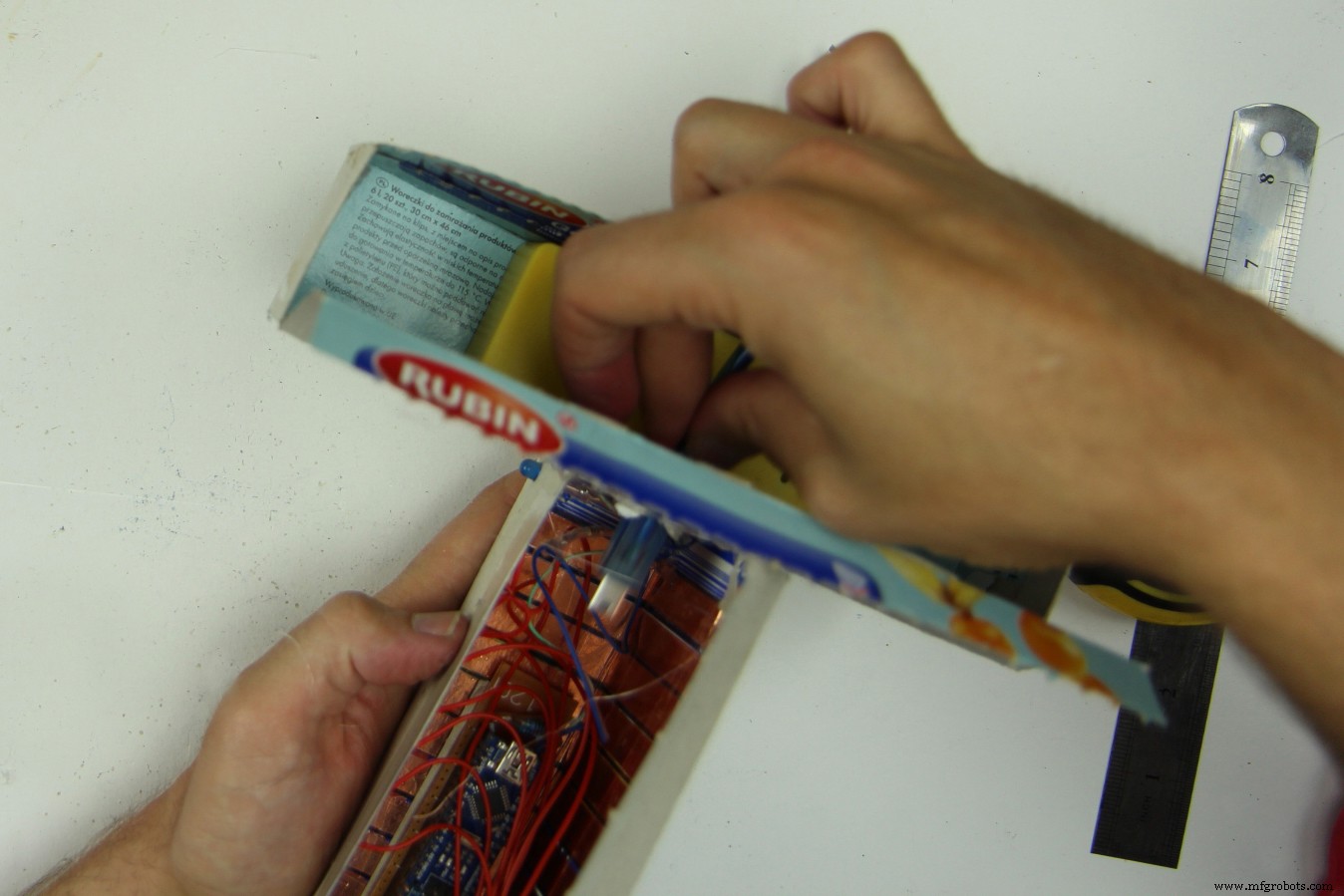
Next, cut the 24 copper electrodes to size...

...and attach them to the enclosure:
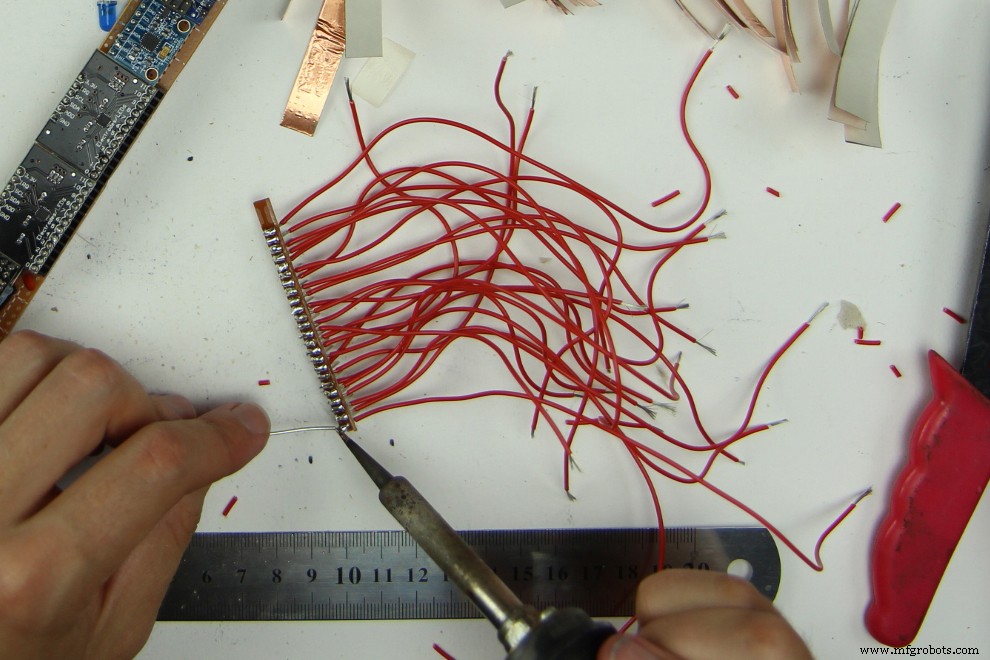
Now we can make the plug. For that cut a 2 * 24 hole wide perfboard and a 24 pin male header to size and solder 24 cables to it. The cables in the middle should be at least 10 cm long. To the outside add the width of your electrodes plus the spacing in between for each cable. If for example you use 1 cm wide copper tape and leave 3 mm between the electrodes, your cable length should increase by 1.3 cm like this 10 / 11.3 / 12.6 / 13.9 / 15.2...
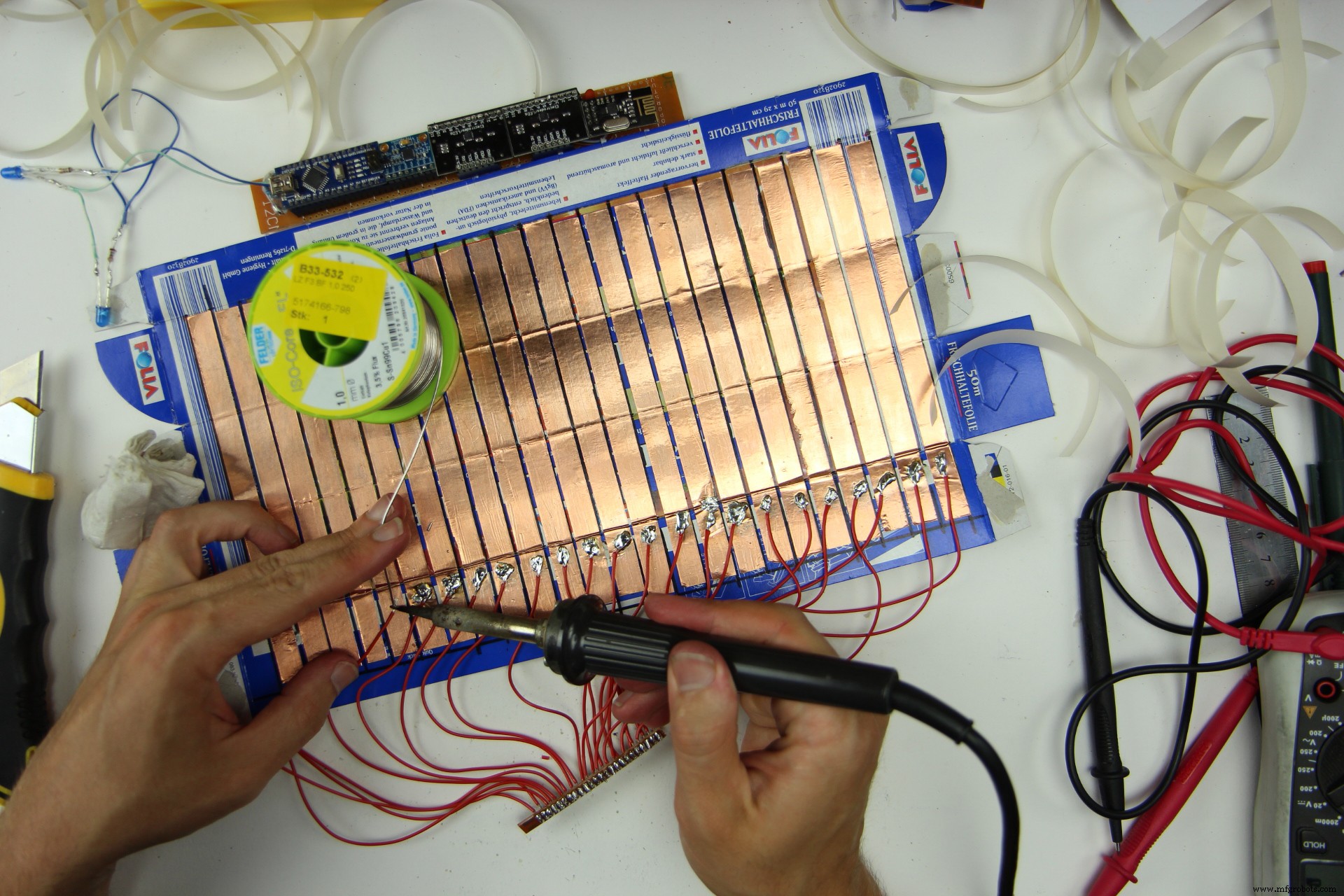
and solder the other ends of the cables to the electrodes like this:
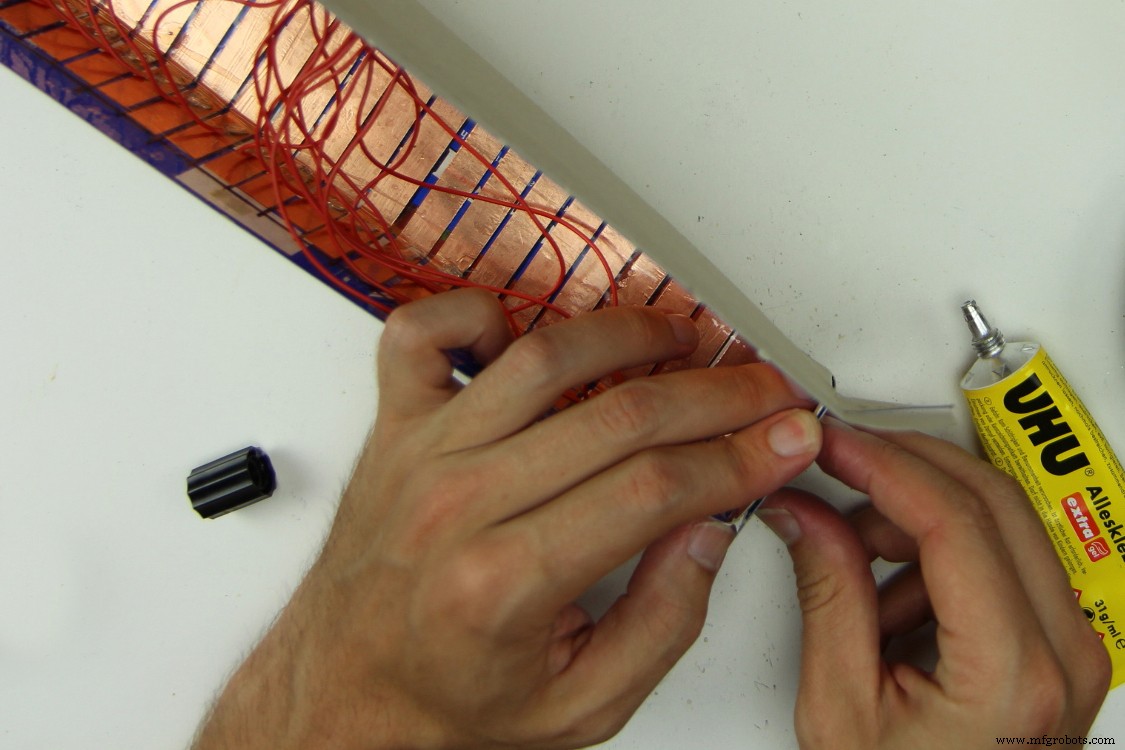
Finish the interface by covering the copper surface with non-conductive adhesive tape:
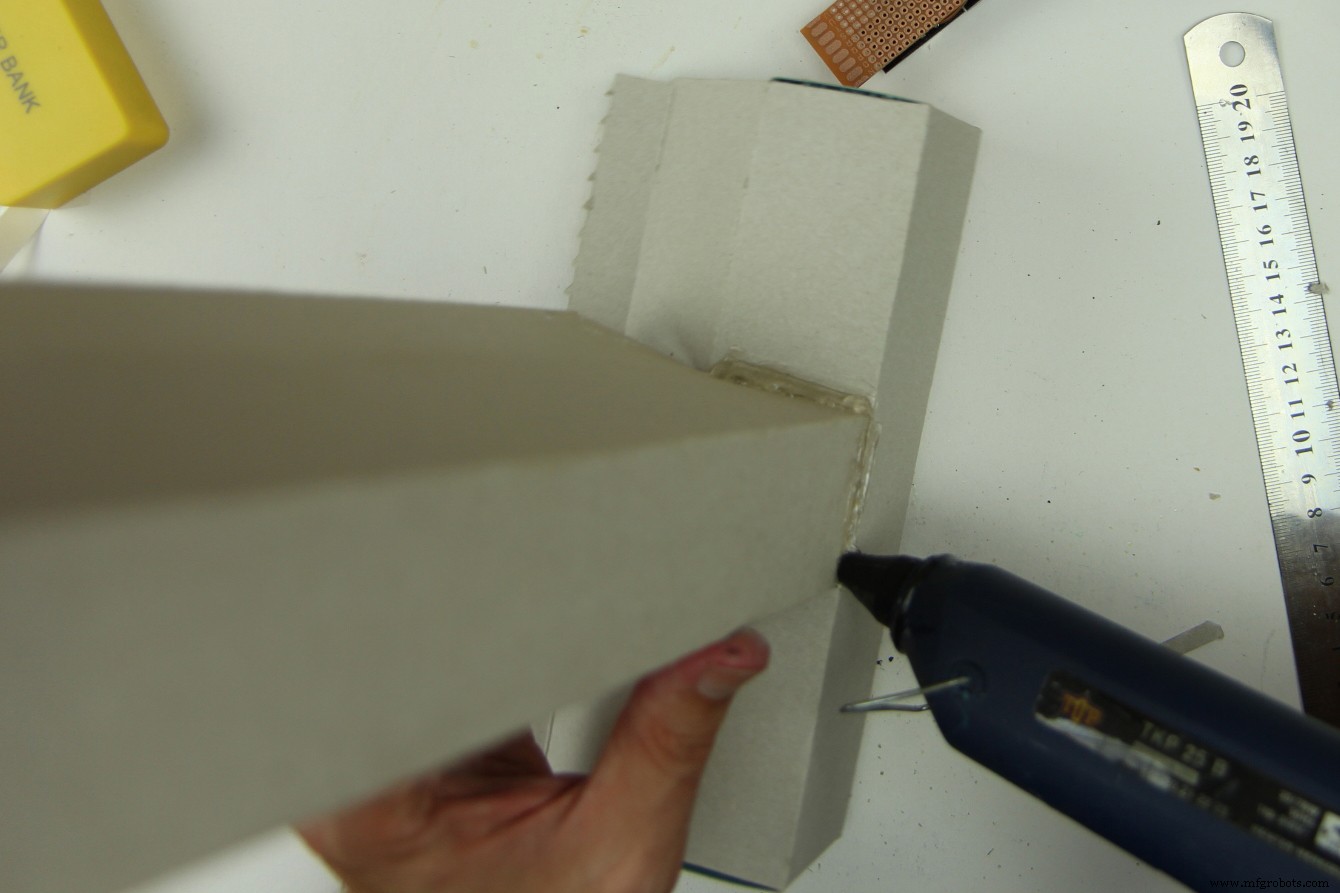
Next fold the interface into a box and glue it:
Glue a smaller box to the box we made in the previous step. It later will contain the powerbank:
Cover the back of the controller board with some leftover cardboard orother slightly thicker non-conductive material:
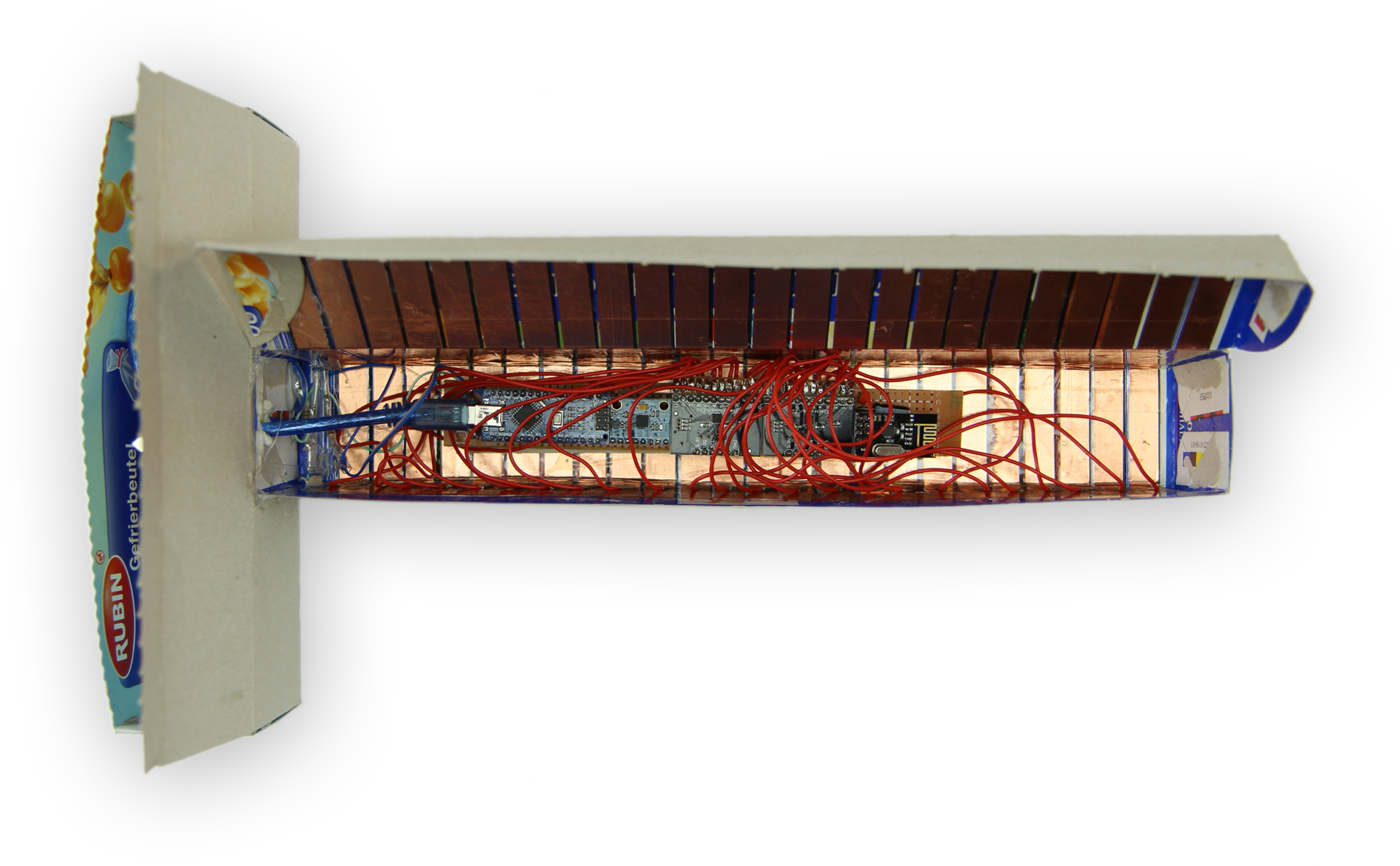
Cut out holes for the LEDs and glue them and the powerbank (yellow object in the picture) in place. Make sure to place the powerbank in a way that you can still plug in and remove the USB-cable because that is how you turn your controller on and off. Also connect the touch-interface to the controller board and put it in the box. Most likely it will not move much, so you do not need to glue it in.
Make a cut out for the USB-A to USB-C cable at the junction of the two boxes, pull it through and connect it to the Arduino Nano:
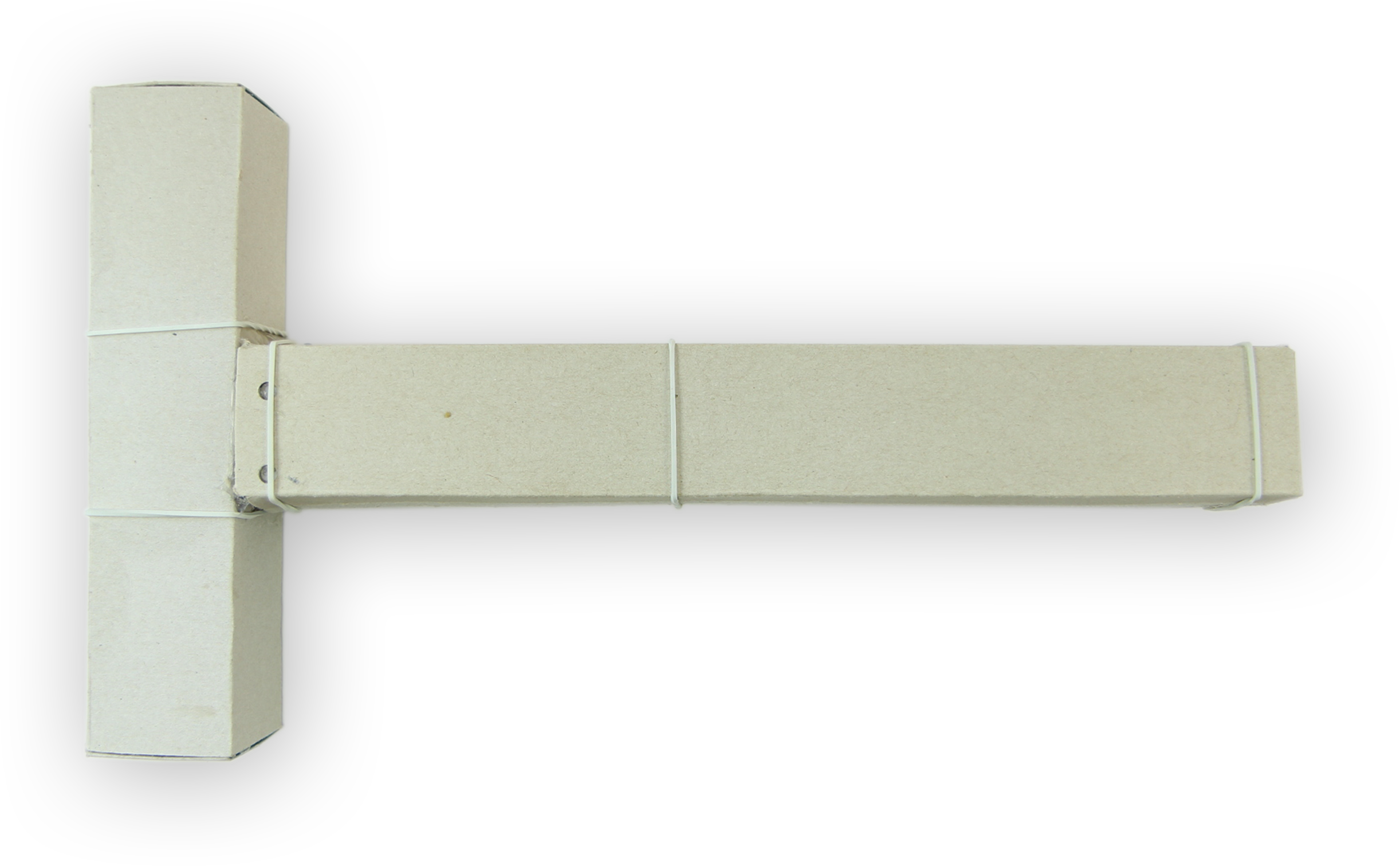
Now the Controller is done!
You can close it with some rubber bands. If you later have problems with the sensors recognizing touch when there is none, try to put some non-conductive material like clingfilm or the like between the touch sensitive enclosure and the board and meandering cables. Also make sure to connect the powerbank when the touch sensitive part of the enclosure does not touch your hands or anything else. See Part 7 for more info.
Part 6 – Making the Receiver Enclosure
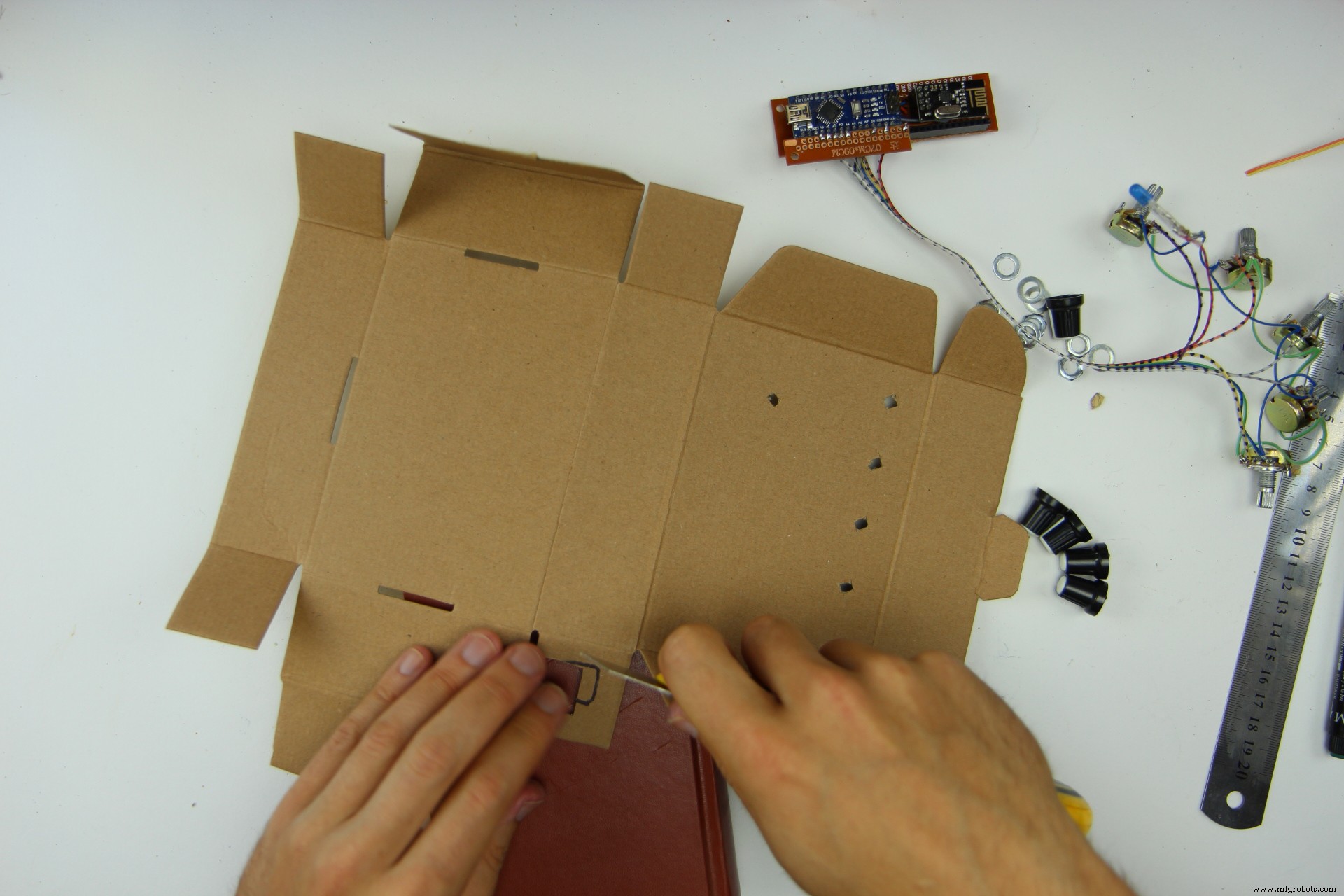
In part six we will make an enclosure for the receiver as well. You will need another cardboard box (I chose one that contained a bluetooth transceiver before – fitting huh?) and some knobs for the potentiometers
First cut out some circular holes for the potentiometers the LED. Also mak a cut out where you want to connect the USB-Cable to the Arduino Nano
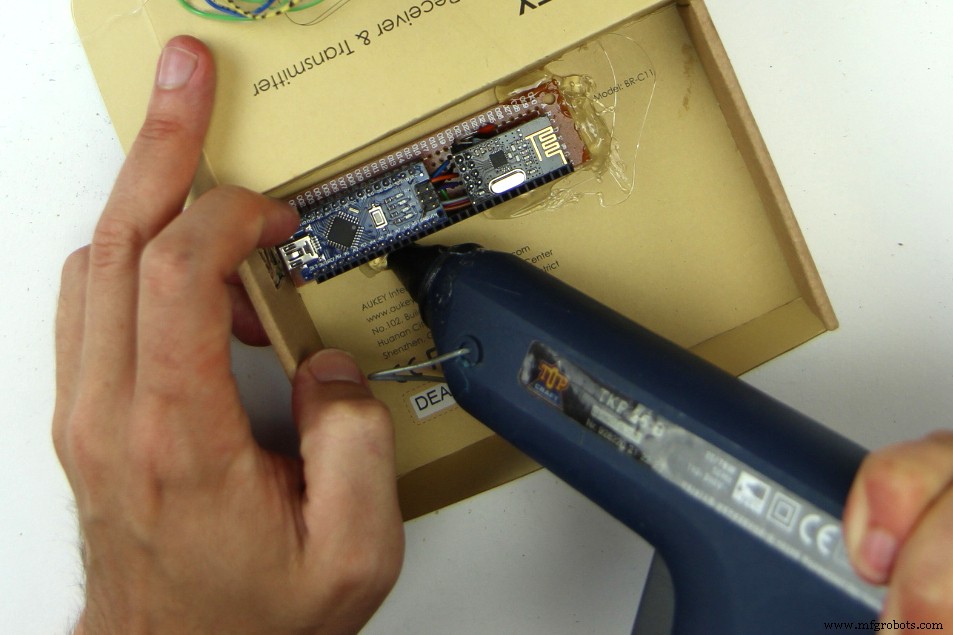
Glue the Receiver board in. Make shure that the USB-C Jack of the Arduino Nano is aligned with the hole that you cut out for the cable connection in the step before.
Next glue in the LED and screw in all the potentiometers. The order how to put them in is the same as in the circuit diagram above:
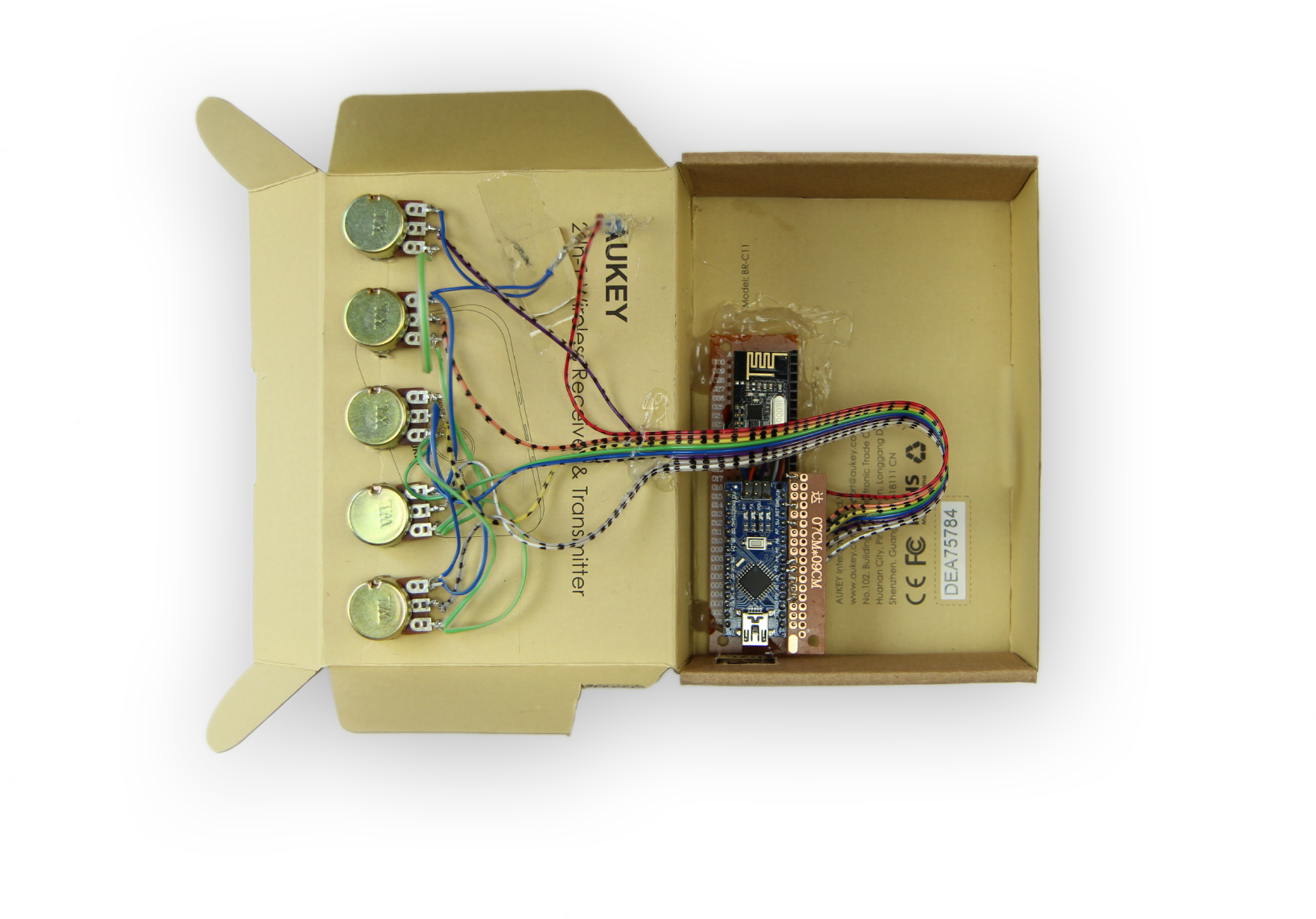
Now you only need to attach the knobs....
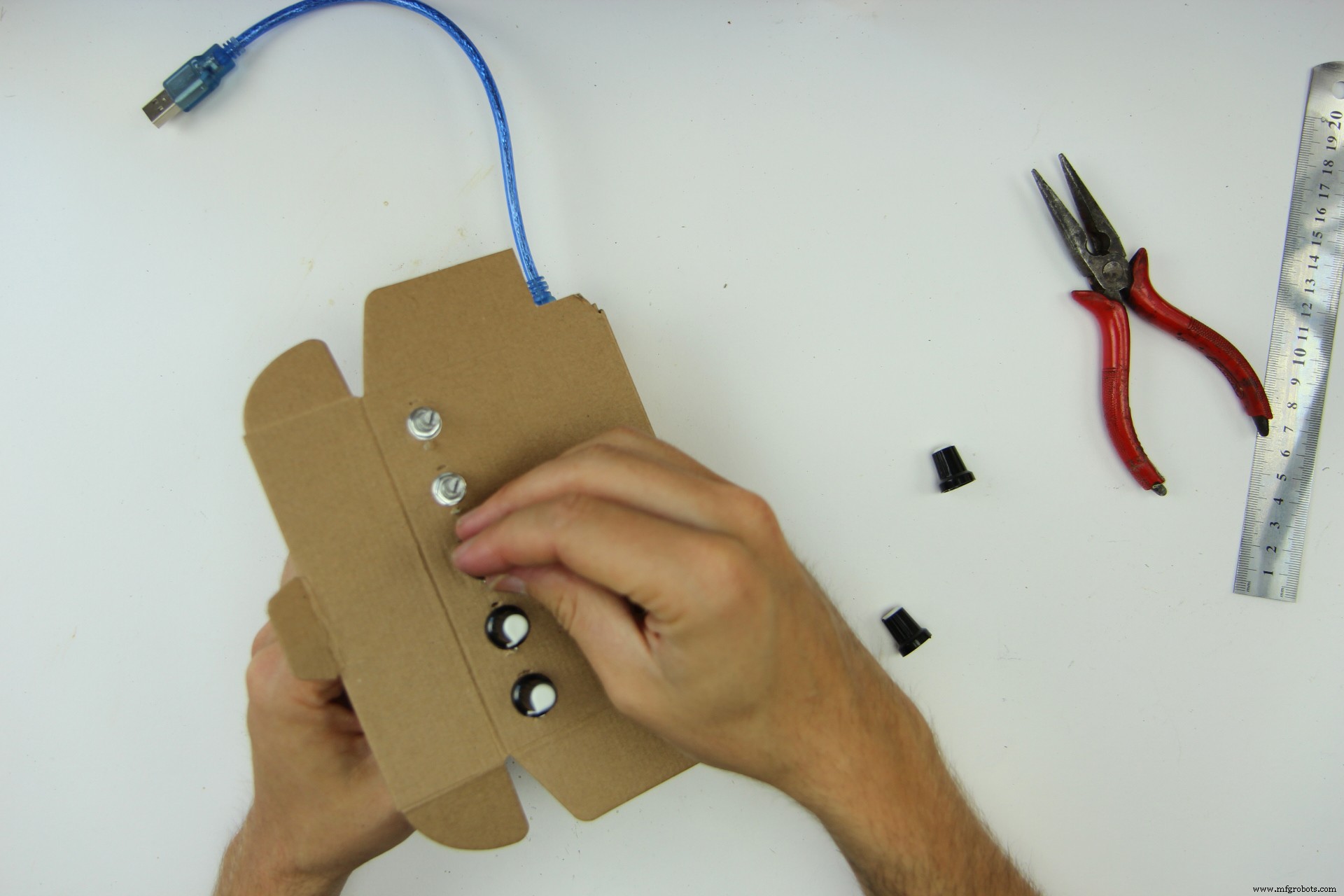
...and the receiver is finished!

Part 7 – Connecting the Receiver to Pure Data
Now that all the hardware is finished, it's time to play some music with it! For that you need software that you can connect the hardware to. For Kravox that software is Pure Data Vanilla that you can download here for free
After installing Pure Data to your computer, start it and open the Kravox.pd file from the attachments. Please note that it needs to be saved on your computer in the same place as the drumsamples folder it comes with - otherwise Pure Data cannot find the samples
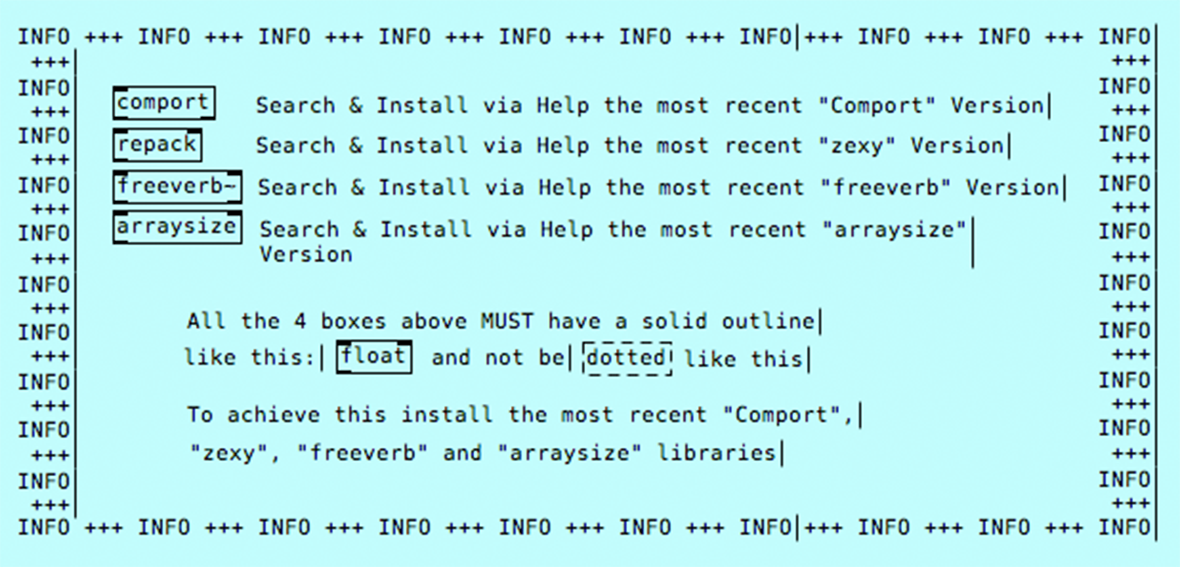
As soon as the Kravox.pd software interface has opened, look for a blue-info box and install the four so-called externals that are listed in the box. Installing them is straightforward:Just click on "help" in the Pure Data Menu, choose "Find additional objects on the internet" (might be phrased slightly different), search for "comport", "zexy", "freeverb" and "arraysize" one by one and install the most recent version. Now the four objects labeled, comport, repack, freeverb and arraysize should have a solid outline like in the picture below. You might need to restart Pure Data for that though
After installing the necessary externals you can connect the Receiver Box via USB. If you altered the code in Part 4 to use the Receiver with the Arduino Serial Monitor you need to undo this change first and upload the original code to the receiver's Arduino Nano before connecting and close the Arduino Serial Monitor, so the receiver is not busy trying to talk to it.
Now have a look at Pure Data's log / info window. If you see a rapidly updating data stream that's great because it means that pure data has already found the receiver, but most likely it will instead show you a red message like the one below that refreshes every other moment:
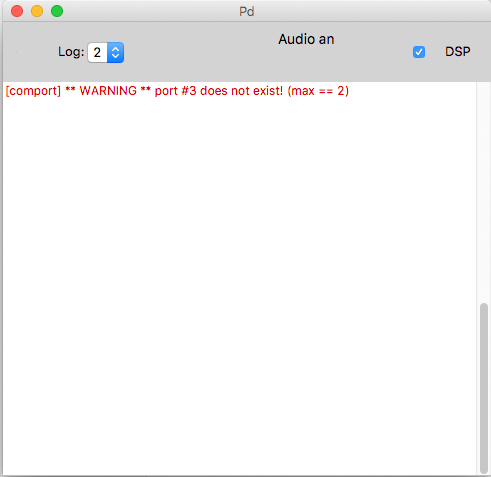
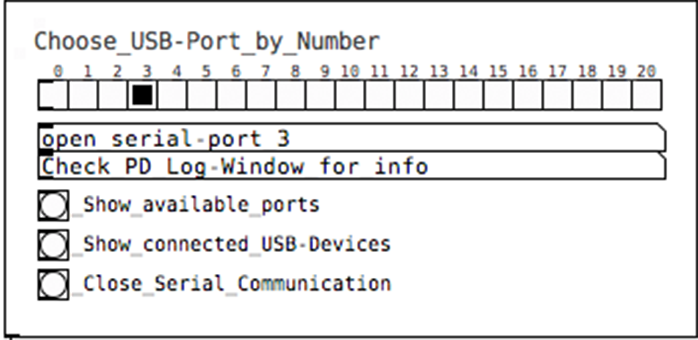
The red message might be a little different, but the result is the same:Pure Data did not yet succeed to connect to your receiver. That is because the program needs to be told, which USB port to listen to. USB-ports are sometimes a bit of a funny thing though:On a 2014 macbook Pro, Pure Data recognizes both USB ports as Serial Port 3, no matter to which you connect the receiver. In Milan I used Kravox with a Lenovo Yoga Pad with only one working USB-Port, that needed to be contacted as Serial Port 6, and recently installed it to another Windows Notebook with two USB-Ports, that wished to be addressed as Serial Ports 8 and 9... So my advice is just to try which number works with your USB-Port. For that I created a simple dialog as part of the Kravox.pd interface, where you can just click through the numbers until one works. You can also try the "Show available ports" and "Show connected USB-devices" buttons – Sometimes, but not very often that also provides useful information. However it takes a while until you get a response in the info window.
You will notice that you have found the right port number and that a connection has been established when the info window shows a data stream like this that updates rapidly:
Very good so far! Click save, so Pure Data will attempt to connect to this port the next time it opens automatically.
However we still need to turn the controller on. If you uncommented the last section of the Kravox Controller code in step 2.7 to connect the controller to the Serial Monitor you should upload the original Version again now.
Connect the controller board to the powerbank. When you do this, the touch-interface-enclosure around the the board should be closed and the touch sensitive part of the enclosure should not touch your hands or anything else, as the touch sensors sense their environment when powered up and assume it to be the untouched state
Congratulations – You are done!
Have much fun playing Kravox!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
산업용 사물 인터넷(IIoT)이라고도 하는 인더스트리 4.0의 미래 성공은 더 큰 혁신과 더 쉽게 생산 규모를 확장할 수 있는 로봇 및 연결 솔루션을 만드는 오늘날 우리의 능력에 크게 의존합니다. 내일. 이를 위해 Analog Devices와 Arrow Electronics는 웹캐스트를 편성하여 7월 13일에 방송할 예정이며 후자가 개발한 재구성 가능한 모션 및 로봇 공학 플랫폼을 소개합니다. 웹캐스트 설명에서: 이 산업은 지능형 연결 모션 솔루션을 허용하는 방식으로 디지털 혁신에 대한 높은 요구를 보고 있습니다. 또한 새로
Motoman 라인의 많은 로봇과 마찬가지로 Motoman UP130 로봇에는 제조업체의 생산성을 높이기 위해 팀으로 작동하는 여러 부품이 있습니다. S, L, U, R, B 및 T 축은 그 자체로도 중요하지만 전체 로봇을 제어하는 축은 해당 축에 포함된 부품입니다. 이러한 부품에는 서보 모터, 감속기 및 손목 장치가 포함됩니다. 서보 모터는 증폭기가 추가되고 로봇의 전원 공급 장치에서 피드백을 얻을 수 있다는 점을 제외하면 AC 모터와 유사합니다. 이 서보 모터는 로봇의 모든 축에 있습니다. S축, 부품 번호 HW938138