

제조공정

산업 제조
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 36 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 36 | ||||
 |
| × | 5 |
 |
| |||
 |
|
 |
|
아래 비디오는 36개의 서보 모터가 전자 예술 작품을 만드는 동작을 보여줍니다. Arduino Uno와 3개의 16채널 PWM 서보 컨트롤러가 뒤에서 작동하고 있습니다. 이것에 대한 원래 영감은 현대 미술관에서 본 450개의 서보가 있는 훨씬 더 큰 버전이었습니다. 그러나 36개의 서보만 있는 이 작은 버전도 몇 가지 흥미로운 효과를 제공합니다.
영상에서 보여주지 않은 선택적인 기능이 있지만, 디스플레이를 인터랙티브하게 만들기 위해 추가할 수 있습니다. 순전히 선택 사항이며 소프트웨어가 없어도 잘 작동합니다. 이 옵션의 경우 5개의 초음파 거리 센서가 디스플레이 상단 가장자리의 뒷면을 따라 장착됩니다. 중앙 센서 위에 손을 놓으면 Uno가 대화형 모드로 전환되고 거리 센서 위로 손을 움직일 때 모든 서보가 손을 따르려고 시도합니다. 몇 초 동안 손을 떼면 프로그램이 디스플레이 쇼로 돌아갑니다. 다시 말하지만 원하는 경우 이 옵션을 추가할 수 있습니다. 그렇지 않으면 소프트웨어가 없어도 잘 작동합니다.
하드웨어
보시다시피, 이 프로젝트는 24인치 x 48인치 페그 보드 위에 구축되었습니다. 너비는 32인치로 줄였습니다. 서보는 4인치 간격으로 장착되고 페그 보드 뒷면에 뜨거운 접착제로 고정됩니다. 3 1/4인치로 자른 아이스 캔디 스틱을 다시 뜨거운 접착제를 사용하여 서보 샤프트에 장착합니다.
SG90 서보 모터는 이 프로젝트에서 유일한 값비싼 품목입니다. Amazon에서 $20에 8개 세트를 구입할 수 있습니다. 그럼에도 불구하고 서보에 100달러를 투자해야 합니다. SG90은 모두 180º 서보라고 가정하지만 대부분은 그렇지 않습니다. 몇 개는 부족하므로 버려야 합니다. 8개들이 5세트를 사면 최소 160º 이동하는 상품 36개를 찾을 수 있을 것입니다.
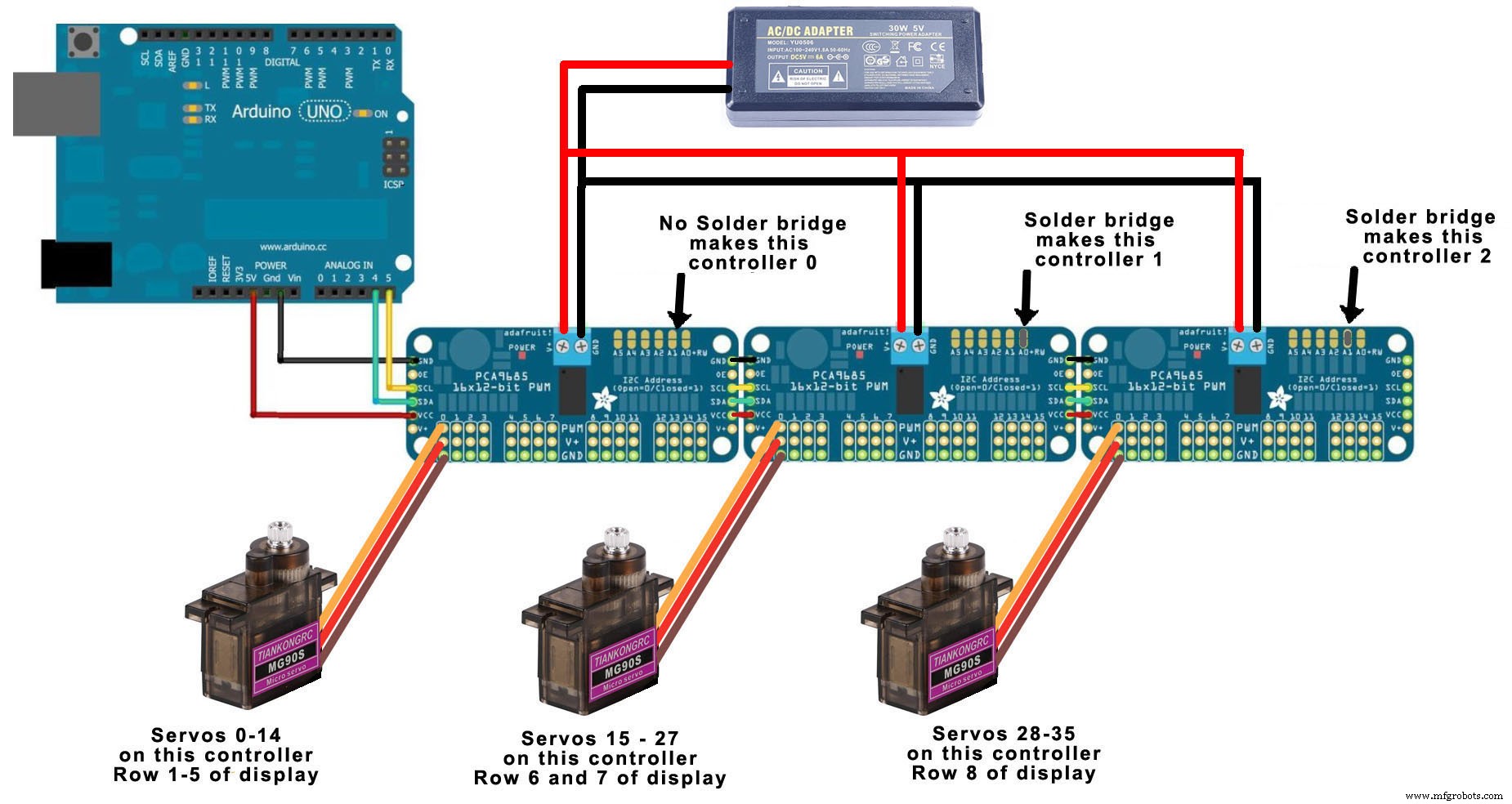
서보는 최소 위치(PWM 150의 위치)로 설정해야 하며, 전면에서 볼 때 이 최소 위치에서 수평 및 오른쪽을 가리키는 장착된 아이스 캔디 스틱이 필요합니다. 서보가 이 최소 위치에 있도록 하는 데 사용할 수 있는 작은 프로그램을 제공했습니다:SetServosToMinimum.
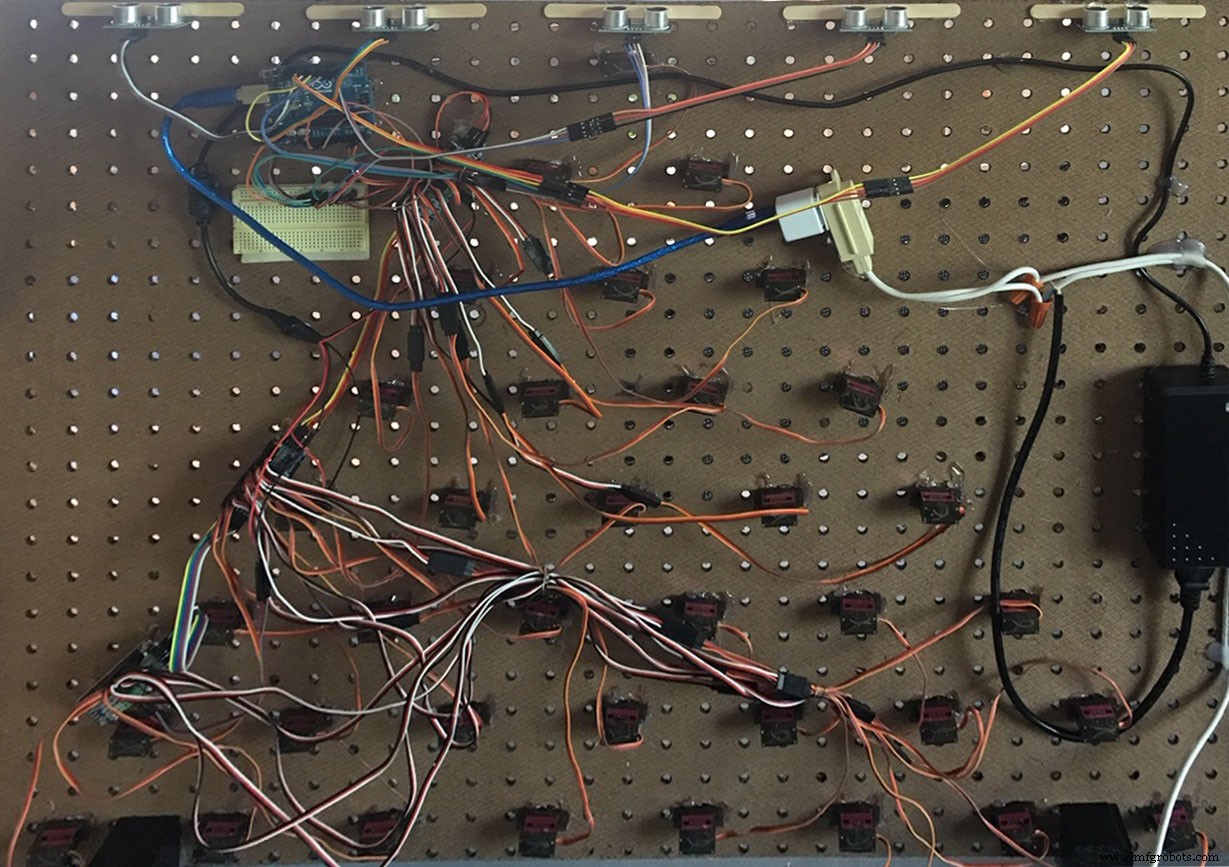
위의 사진은 뒷면 레이아웃을 보여줍니다. 세 개의 PWM 컨트롤러는 서보의 왼쪽에 장착되어 있습니다. 30와트 5볼트 공급은 맨 오른쪽에 있습니다. Arduino는 USB 전원 어댑터를 통해 별도로 전원이 공급됩니다. USB 케이블을 뽑을 수 있고 USB 연장 케이블을 통해 프로그램 변경을 위해 내 컴퓨터에 연결하기 위해서만 그렇게 합니다. 조금 이상해 보이지만 편리한 것 같아요.
디스플레이 상단을 따라 장착된 옵션인 초음파 거리 센서도 볼 수 있습니다. 뜨거운 접착제와 여분의 아이스 캔디 스틱을 사용하여 장착했습니다. Uno 아래에 보이는 작은 프로토타이핑 보드는 단순히 모든 초음파 센서에 전원과 접지를 쉽게 공급하기 위한 것입니다.
소프트웨어
저는 Adafruit의 PWM Servo Driver 라이브러리를 사용하여 16채널 서보 컨트롤러를 처리하고 있으므로 Adafruit에서 가져와 Arduino 라이브러리에 설치해야 합니다. 내 소프트웨어는 선택적 초음파 센서를 사용하거나 사용하지 않고 그대로 사용할 수 있습니다. 3분 남짓한 쇼가 반복되기 전에 다양한 효과를 보여준다. 옵션 센서를 장착하면 중앙 센서에 손을 댈 때마다 인터랙티브 모드로 진입합니다.
소프트웨어에는 많은 것들이 있습니다. 여기에서 전체를 설명하지는 않겠지만 작동 방식에 대한 약간의 정보를 제공하겠습니다. 나는 두 개의 테이블이 있습니다. curPos 테이블은 각 서보의 현재 위치를 3으로 나눈 값을 저장합니다. tarPos 테이블은 각 서보의 원하는 위치를 3으로 나눈 값을 저장합니다. 두 가지 이유로 인해 3으로 나뉩니다. 첫째, 바이트 단위로 저장할 수 있고 둘째, 항상 3단계씩 서보를 이동하고 있습니다.
Uno는 처음에 각 서보의 위치를 알지 못하므로 설정 루틴은 모든 서보를 수직 위치로 설정하고 모든 curPos 및 tarPos 변수를 해당 수직 위치와 일치하도록 설정합니다. 그런 다음 tarPos에서 원하는 위치를 변경하여 서보를 다른 위치로 이동할 수 있습니다.
goToTargets()라는 서브루틴은 서보가 이동하는 주요 방법입니다. tarPos에서 목표를 설정하여 서보가 어디로 가는지 제어하고 goToTargets 루틴을 사용하여 서보가 가는 속도를 제어할 수 있습니다. 속도를 제어하는 두 가지 방법이 있습니다. 서보를 15단계 증분으로 목표를 향해 이동합니다. 여기서 서브루틴에 대한 반복수 입력은 15단계의 배수를 제공합니다. 다른 입력은 mydelay로 goToTargets의 각 호출에 밀리초 단위로 지연을 추가합니다.
다른 많은 것들이 있지만 기본적으로 다른 모든 것은 제시된 다양한 효과의 다양한 설정과 구현일 뿐입니다.
선택적 대화형 기능은 trackRoutine이라는 서브루틴에 의해 처리됩니다. goToTarget 루틴이 중앙 초음파 센서 위 어딘가에서 물체(손)를 볼 때 호출됩니다. 모든 서보가 센서 위로 움직일 때 손의 움직임을 따르도록 시도합니다. 몇 초 동안 손이 감지되지 않으면 반환되고 일반 프로그램이 다시 시작됩니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">미리보기 없음(다운로드만 가능).
 5개의 초음파 거리 센서를 Uno에 연결하여 서보가 손의 움직임을 추적할 수 있도록 합니다.
5개의 초음파 거리 센서를 Uno에 연결하여 서보가 손의 움직임을 추적할 수 있도록 합니다. 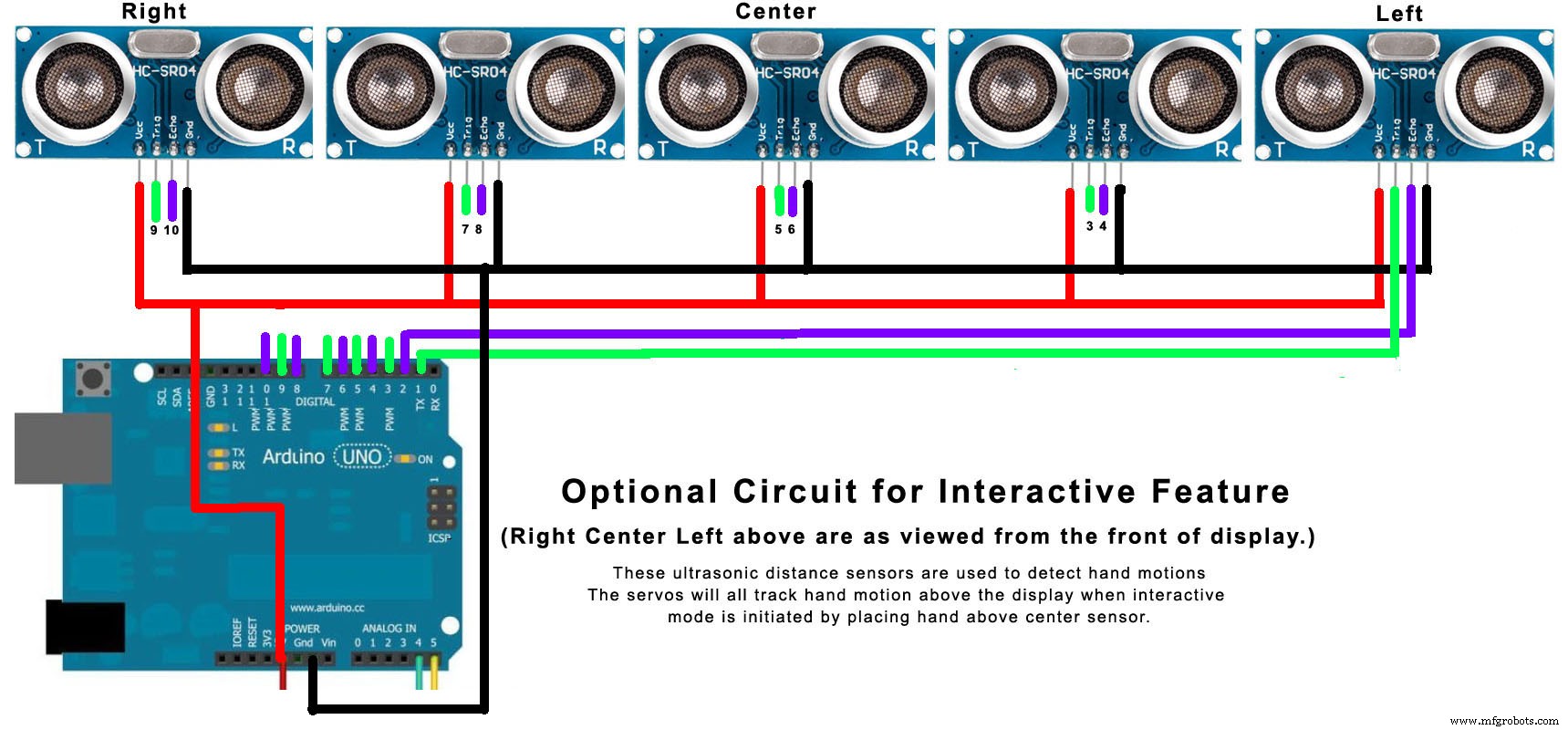
제조공정
세계 최대 산업용 로봇 및 자동화 기술 제조업체 중 하나인 Yaskawa Electric은 회사 웹사이트의 보도 자료에 따르면 현재까지 2천만 대의 AC 서보 모터를 판매했습니다. 이 회사는 1983년부터 일본과 해외의 광범위한 고객에게 AC 서보 모터와 컨트롤러를 제공했습니다. 메카트로닉스(mechatronics)라는 용어를 만든 Yaskawa는 2020년 8월 누적 AC 서보 모터 출하량이 2천만 대에 이르렀다고 말합니다. Yaskawa는 1958년 세계 최초의 회사로 프로토타입 DC 서보 모터 Minertia Moto
서보 모터는 산업뿐만 아니라 ROBOTICS에서 널리 사용되며, 서보는 로봇 팔, RC 자동차, 레이더 접시, 컨베이어 벨트, 안테나 위치 지정, 카메라 자동 초점, 인쇄 공정 등과 같은 오늘날 ROBOTICS 프로젝트의 핵심입니다. 많은 취미 프로젝트에서 서보 모터가 널리 사용됩니다. 이 기사가 실제로 서보가 무엇인지, 서보 모터의 기본 작동 원리, 다양한 서보, 서보 모터와 일반 DC 모터의 기본 비교에 대한 간략한 정보를 제공하기를 바랍니다. 서보 모터 정의: “ 부정적인 피드백에 반응하여 모션을 조절하는 경우 명령에