

산업용 로봇

산업 제조
협동 로봇 공학은 매일 발전하고 있으며 이를 사용함으로써 우리에게 일련의 이점과 이점을 제공합니다. 오늘의 게시물에서는 협동로봇이 무엇이고 그 특징, 협동 모드가 무엇인지, 협업 로봇이 어떻게 되는지 간략하게 살펴보겠습니다. 업계에서 사용되는 장점과 이점, 가장 일반적인 응용 프로그램입니다.
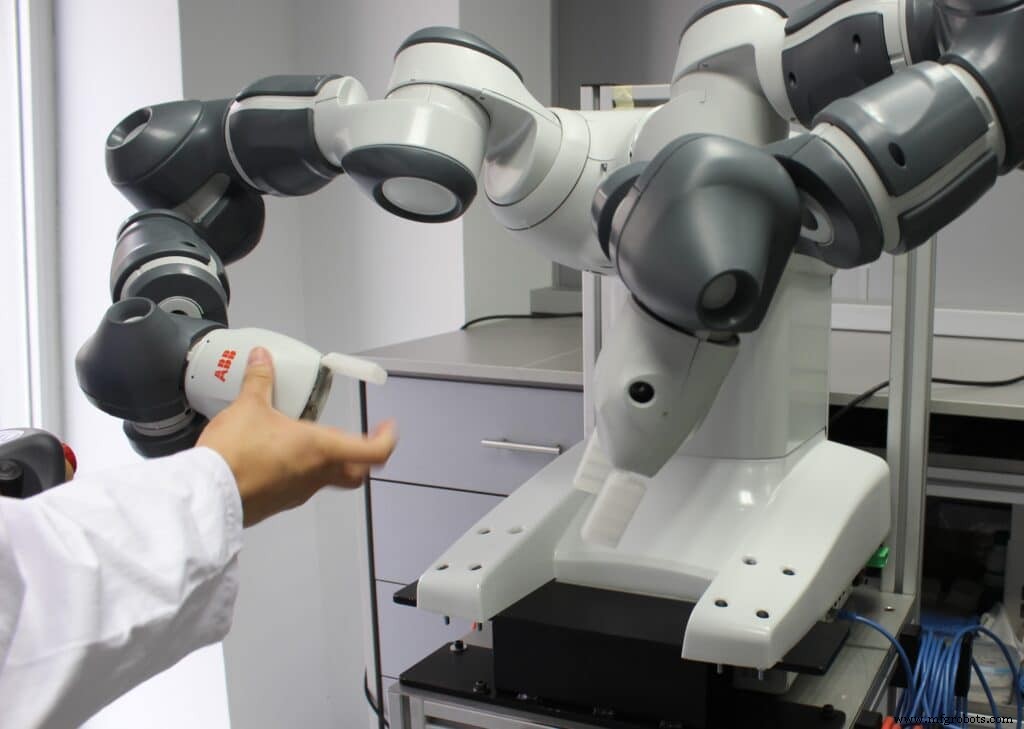
협동 로봇은 물리적으로 상호작용하도록 설계된 장비입니다. 작업 환경에 있는 사람들과 협업 공간을 공유할 수 있음 . 이러한 목적을 위해 설계되었기 때문에 작업 및 커뮤니케이션 작업이 용이합니다.
코봇 설계 덕분에 안전 작업자가 서로 상호 작용할 때. 이 상호 작용을 안전하게 허용하는 특성은 다음과 같습니다. 센서 힘과 속도, 그리고 재료의 유형을 측정하고 제어하는 조인트에 포함 제조에 사용되며, 무엇보다도 더 가볍고 가장자리가 더 적습니다.
이미 말했듯이 협동 로봇을 사용하면 생산 작업자와 협업하여 작업량을 줄일 수 있습니다. 가장 까다롭고 인체공학적이지 않은 작업을 처리할 수 있습니다. 설계 기능은 이 협업의 보안을 보장할 뿐만 아니라 다목적이며 설치해야 하는 공간이 줄어듭니다. 경우에 따라 추가 안전 및 보호 장치가 필요하지만 이러한 장치는 공간을 절약하고 설치의 복잡성을 줄이기 위해 설계되었습니다.
사람들은 문제를 해결하고 자신이 수행하는 작업에 손재주를 제공하는 능력을 제공하는 반면, 협동로봇은 강력함과 정확성을 제공합니다. 그래서 둘은 완벽한 커플입니다.
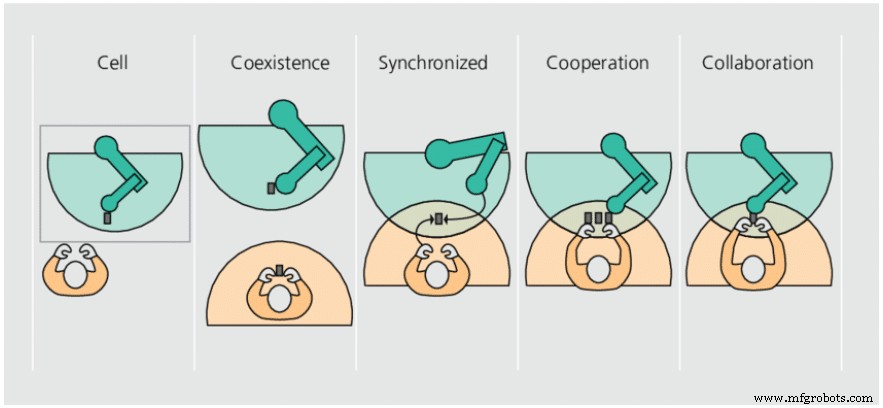
몇 가지 작업 모드가 있습니다:
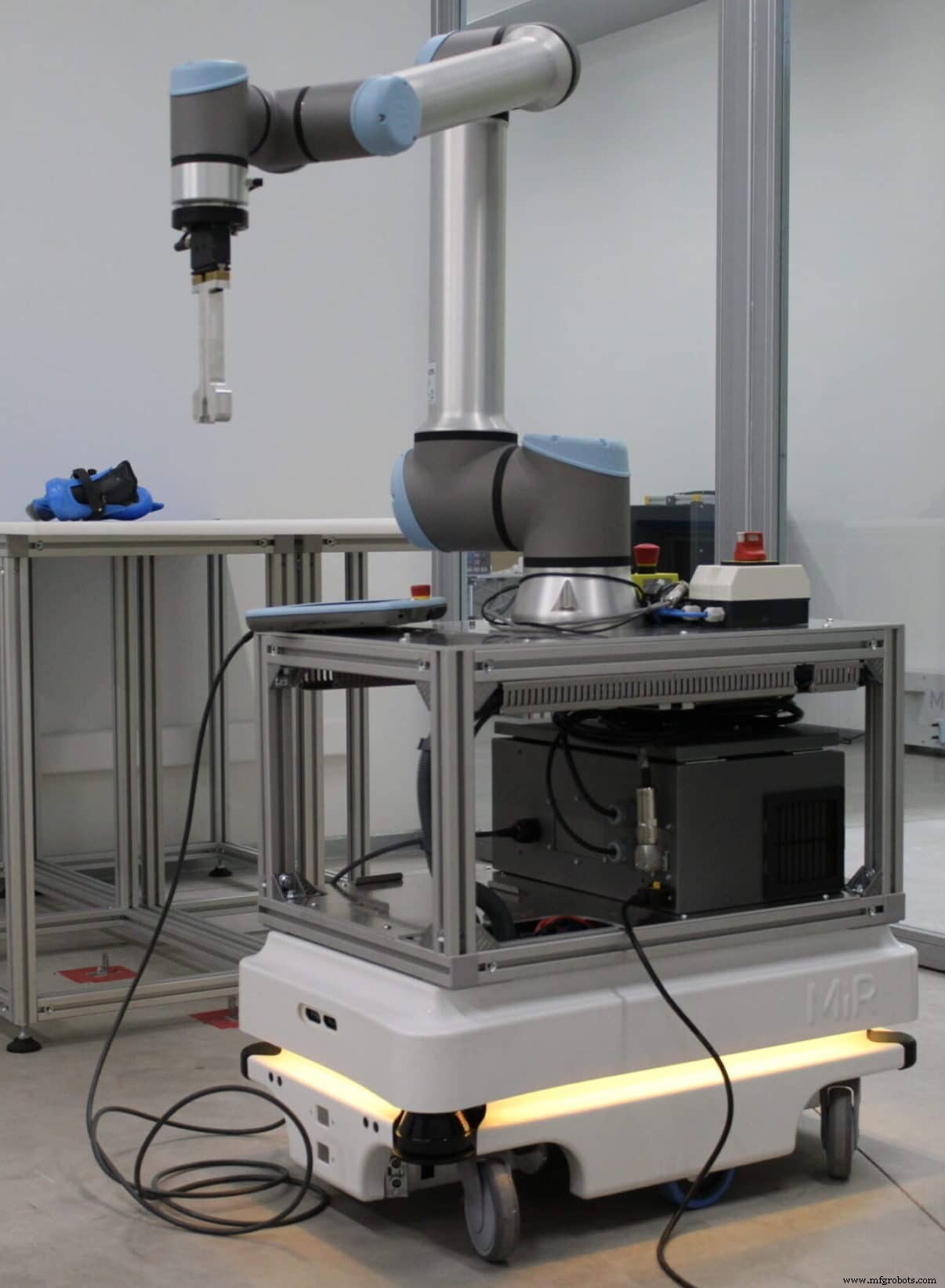
협동로봇은 작업자와의 협업 외에도 PLC 또는 CNC와 같은 생산 프로세스와 관련된 다른 주변 장비 및 시스템과 완벽하게 통합됩니다. 그들 중 일부는 Profinet 또는 TCP/IP와 같은 통신 프로토콜을 사용하기 때문에 현재 프로세스와 생산 공장의 기존 자동화 통합에 완벽하게 적합합니다.
협동 로봇은 생산 라인을 크게 변경하지 않고도 작업을 자동화할 수 있어 중소 산업에 좋은 기회입니다. . 이것은 인간과 함께 작업할 수 있는 가능성에 추가되어 값비싼 울타리를 피하고 사람들의 안전을 향상시켜 기존 로봇에 비해 큰 이점입니다. 또한 협동로봇은 프로그래밍하기 쉽고 통합도 간단하여 이러한 유형의 회사에서 쉽게 구현할 수 있습니다.
스페인에서는 산업용 직물의 상당 부분이 중소기업으로 구성되어 있으므로 협업 로봇 공학은 모든 의미에서 자동화를 위한 큰 발전입니다. 기존의 로봇이 지금까지 불가능했던 것까지 가능합니다.
반면에 자동차 산업과 같이 가장 자동화된 산업은 작업자를 지원하고 제품에 가치를 추가하지 않는 작업을 정확하게 수행하기 때문에 생산에 코봇을 포함할 수 있는 기회가 있습니다. 또한 덜 인체 공학적을 돌볼 수 있습니다. 부상 및 위험한 작업을 유발하는 작업.
협동 로봇의 주요 장점은 추가 보안 시스템이나 넓은 작업 공간 없이 작업자와 함께 작업할 수 있다는 점입니다. . 물론 이러한 로봇의 등장으로 인해 새로운 안전 요건과 그 용도를 정의하는 새로운 법률이 제정되었습니다.
반면에 설치 및 프로그래밍 협동로봇이 더 쉬워집니다 기존 로봇보다 프로그래밍 인터페이스는 직관적이고 사용하기 쉬우며 로봇을 수동으로 이동하고 원하는 지점과 위치를 기록한 다음 이를 기록하고 자동으로 움직임을 만들 수 있습니다. 설치 또한 큰 공간이나 보안 시스템이 필요하지 않아 간편합니다.
이 로봇을 설치할 때의 단순함은 로봇을 한 위치에서 다른 위치로 이동하고 프로그래밍하여 다른 작업을 수행하기 쉽기 때문에 매우 다재다능합니다.
협동 로봇의 다른 장점은 다음과 같습니다.
이미 말했듯이 협동로봇은 반복적인 작업을 수행하고 작은 부하나 조립품을 처리하는 데 특히 유용합니다. 협동 로봇을 사용할 수 있는 몇 가지 응용 프로그램은 다음과 같습니다.

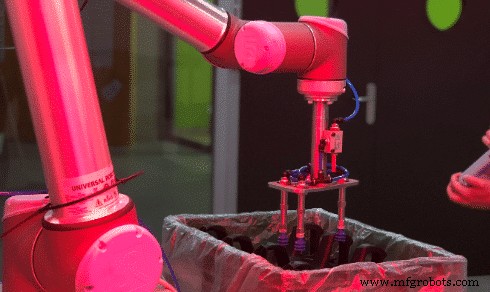
§ 어셈블리 :협동로봇은 반복적인 테스트를 수행할 뿐만 아니라 조립 시간을 단축하고 생산 속도를 높이고 품질을 향상시킬 수 있습니다. 작업.


협동 로봇의 통합은 프로세스 개선을 위한 훌륭한 단계입니다. 이미 보았듯이 다양한 부문과 모든 규모의 회사에 적용할 수 있어 자동화가 용이합니다.
프로젝트에서 협동 로봇을 사용하고 싶습니까? 문의하거나 876715051번으로 전화주세요!
산업용 로봇
픽 앤 플레이스 애플리케이션은 공장 및 컨베이어 시스템만큼 오랫동안 사용되어 왔습니다. 한 곳에서 다른 곳으로 제품을 이동하는 이러한 작업은 인간 작업자에게 지루하고 무미건조하며 반복적인 이동으로 인해 부상을 입을 수도 있습니다. 그런 다음 픽 앤 플레이스 로봇이 등장하여 문제를 해결했습니다. 여러 산업, 특히 속도가 필수인 식품 산업에서 로봇으로 픽 앤 플레이스 애플리케이션을 자동화하기 시작했습니다. 식량에 대한 수요가 오늘날 세계에서 이보다 더 높은 적은 없었습니다. 이것이 픽 앤 플레이스 로봇 시스템이 많은 식품 생산 라인의
Yaskawa Motoman은 최근 전 세계에서 사용할 수 있는 최초의 협업 로봇인 Human Collaborative 10(HC10)의 프로토타입을 선보였습니다! 일반적으로 산업용 로봇은 인간 작업자에게 부상을 입힐 수 있는 많은 힘과 힘으로 움직이기 때문에 커튼, 울타리 또는 기타 장벽 뒤에 배치됩니다. 그러나 Fanuc, Motoman, KUKA 및 ABB와 같은 로봇 제조업체는 특정 응용 분야 및 산업에서 협동로봇의 이점을 깨닫고 있으며 전 세계적으로도 마찬가지입니다. 협업 시장과 수요가 매우 인기를 끌면서 이 로봇 산