

산업용 로봇

산업 제조
로봇 사용자마다 프로그래밍 취향이 다릅니다. 다음은 RoboDK의 인터페이스를 사용자에 맞게 맞춤설정하는 10가지 좋은 방법입니다.
다른 사람의 부엌에서 아침 식사를 직접 만들어 본 적이 있습니까?
악몽이죠!?
칼 붙이가 어디에 있는지도 모르고, 토스터에는 혼란스러운 버튼 배열이 있으며 냉장고는 모르도르 산보다 탐색하기 어려워 보입니다.
이것은 평소에 사용하는 것과 다른 프로그래밍 소프트웨어를 사용하려고 할 때 느낄 수 있는 것과 정확히 같습니다. 인터페이스가 제대로 보이지 않고 익숙해지는 데 시간이 걸릴 수 있습니다.
그러나 RoboDK를 사용하면 타협할 필요가 없습니다. 인터페이스는 매우 사용자 정의할 수 있습니다. 필요에 맞게 인상적인 다양한 측면을 변경할 수 있는 옵션이 있습니다.
다음은 선호도에 맞게 RoboDK의 인터페이스를 사용자 정의하는 10가지 매우 유용한 방법입니다.
몇 년 전 제가 대학에 다닐 때 동료 중 한 명이 프로그래밍할 때 "다크 모드"로 변경하는 이점에 대해 말했습니다.
대부분의 소프트웨어 패키지는 흰색 배경에 검정색 텍스트를 사용합니다. 어두운 모드는 모든 색상을 반전시켜 반대 방향, 즉 뒷면 배경에 밝은 텍스트를 표시합니다. 많은 사람들이 다크 모드가 눈의 피로를 줄여준다고 말합니다(그리고 구형 CRT 모니터에서 깜박임을 줄이는 증거가 있었습니다).
요즘 현대적인 화면에서 다크 모드가 눈에 더 좋은지 여부에 대해 상충되는 이론이 있습니다. 프로그래밍할 때 정기적으로 눈을 쉬게 하는 것이 훨씬 더 좋습니다. 하지만 한 가지는 확실히 말할 수 있습니다. 일부 사람들은 다크 모드를 좋아한다는 것입니다.
다크 모드의 팬이라면 이제 OS를 다크 모드로 설정하면 RoboDK가 자동으로 활성화합니다. 디스플레이 옵션(도구> 옵션 창> 디스플레이 탭 선택)에서 이를 사용자화할 수도 있습니다. ).
OLED 디스플레이(LCD는 아님)를 사용하면 어두운 모드를 사용하면 화면에서 사용하는 전력도 줄일 수 있으므로 배터리 전원으로 RoboDK를 사용하는 경우에 좋습니다.
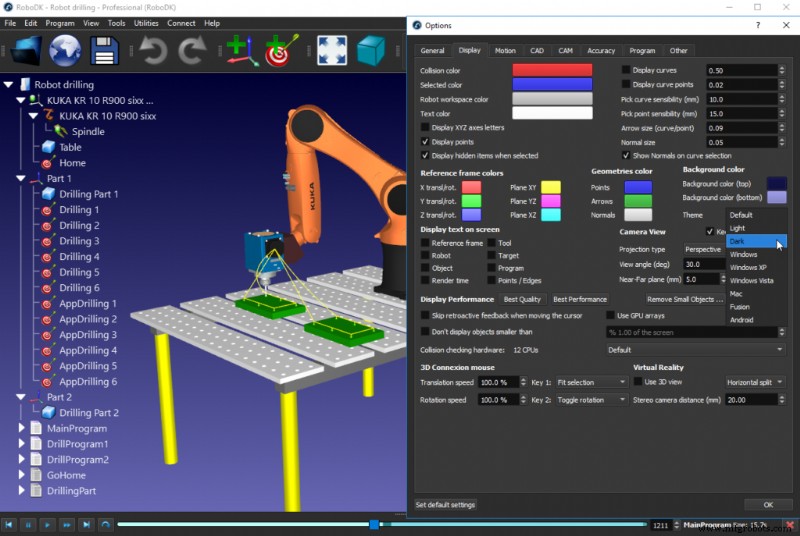
다크 모드를 사용하지 않더라도 RoboDK의 거의 모든 색상을 원하는 대로 변경할 수 있습니다.
변경할 수 있는 색상에는 충돌 색상, 텍스트 색상, 포인트 색상, 배경 색상, 기준 프레임 색상 및 선택한 항목의 색상이 포함됩니다.
도구> 옵션 창> 표시 탭을 통해 모두 변경할 수 있습니다. .
다양한 3D 그래픽 프로그램을 써본 사람으로서 새 프로그램으로 전환하고 마우스 모드가 다를 때 얼마나 짜증나는지 압니다. 갑자기 위가 아래가 되고 아래가 위가 되고 마우스 휠 기능이 바뀌고 버튼 기능이 휙휙 돌아갑니다.
RoboDK를 사용하면 도구 메뉴> 옵션 창> 일반 탭을 통해 마우스 모드를 원하는 모드로 변경할 수 있습니다. .
플러그인 중 하나를 사용하여 즐겨 사용하는 CAD/CAM 패키지를 RoboDK에 통합했다면 RoboDK가 해당 프로그램의 비주얼 스타일과 마우스 모드를 자동으로 일치시키도록 할 수 있습니다.
예를 들어, SolidWorks 플러그인을 사용하는 경우 플러그인 메뉴를 통해 "SolidWorks 테마"를 설정할 수 있습니다.
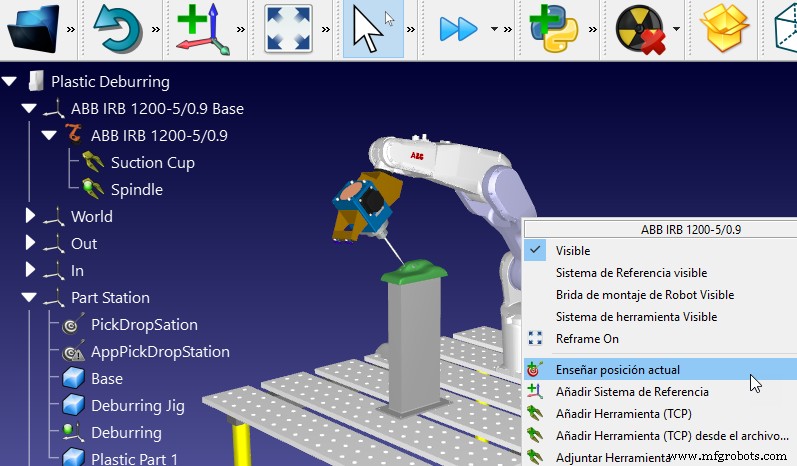
메뉴가 모국어로 작성되어 있으면 새 소프트웨어를 탐색하는 것이 항상 더 쉽습니다.
RoboDK에서는 도구 메뉴> 언어를 통해 언어를 쉽게 변경할 수 있습니다.
작성 당시에는 가장 일반적인 16개 언어에 대한 지원이 포함되어 있습니다. 모든 언어가 완전히 번역된 것은 아니지만 주요 기능이 표시됩니다.
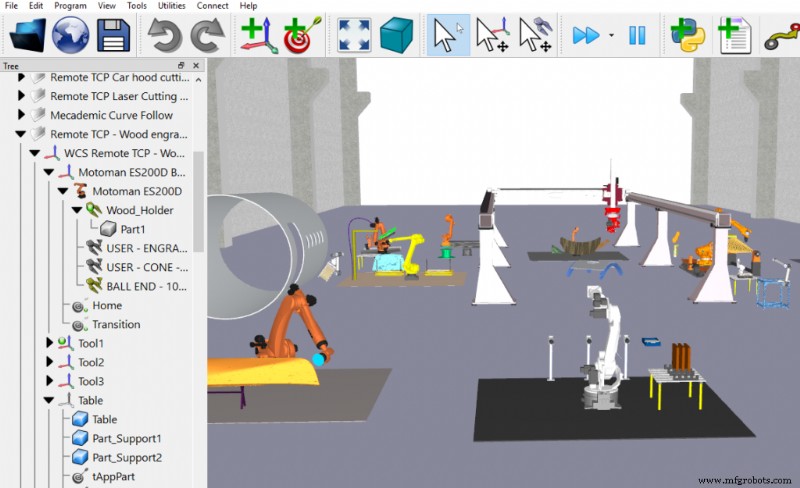
3D 그래픽을 사용하는 프로그램에는 흥미로운 문제가 있습니다. 때로는 실제 세계에서와 같이 개체를 보고 싶을 때가 있습니다(현실적인 원근 효과 사용). 다른 경우에는 모델이 덜 사실적으로 보이더라도 뷰가 치수를 더 정확하게 반영하기를 원할 수 있습니다.
도구 메뉴> 옵션 창> 표시 탭을 통해 두 가지 보기(투시 및 직교) 간에 전환할 수 있습니다.
세계의 모든 국가는 소수점(.)을 사용하여 소수점을 구분하는 국가와 쉼표(,)를 사용하는 국가의 두 그룹으로 나눌 수 있습니다.
예:
도구 메뉴> 옵션 창> 일반 탭을 통해 RoboDK의 번호 로케일을 변경할 수 있습니다.
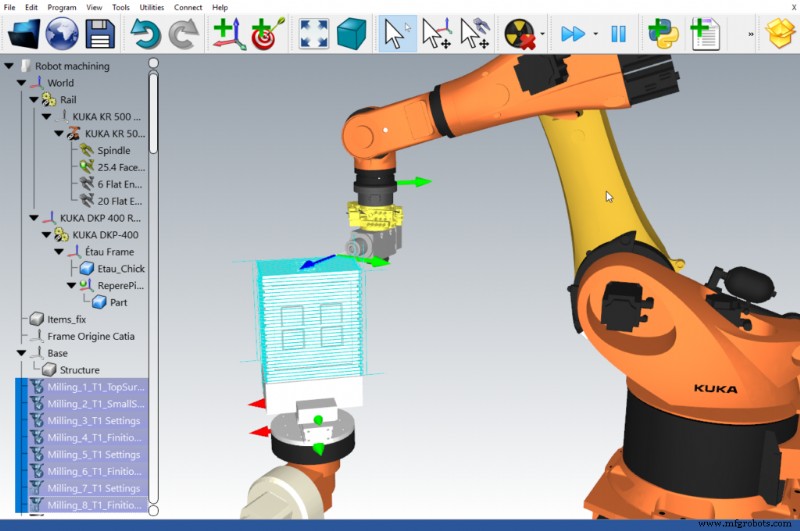
프로그램 트리는 RoboDK 창 왼쪽에 표시됩니다. 여기에는 현재 시뮬레이션에 대한 모든 개체와 프로그램 지침이 포함되어 있습니다.
때로는 프로그램 트리를 축소하여 그 안에 있는 모든 항목을 더 자세히 볼 수 있습니다. 다른 경우에는 다시 확대하고 싶을 것입니다.
Ctrl 키를 누른 상태에서 프로그램 트리의 크기를 변경할 수 있습니다. 키를 누르고 마우스 휠을 돌립니다.
보기 메뉴> 창 안에 나무 표시를 통해 나무의 배경을 투명에서 고정으로 또는 그 반대로 변경할 수도 있습니다.
RoboDK는 성능이 낮은 컴퓨터에서 잘 작동합니다. 그러나 계산 부하를 줄이기 위해 일부 디스플레이 설정을 변경할 수 있습니다.
도구 메뉴> 옵션 창> 디스플레이 탭을 통해 찾을 수 있는 디스플레이 성능과 관련된 3가지 옵션이 있습니다. . 이를 통해 최고 품질 또는 최고 성능에 대한 디스플레이를 사용자 정의할 수 있습니다. 또는 개체 단순화를 사용하여 3D 모델의 정점 수를 줄일 수 있습니다.
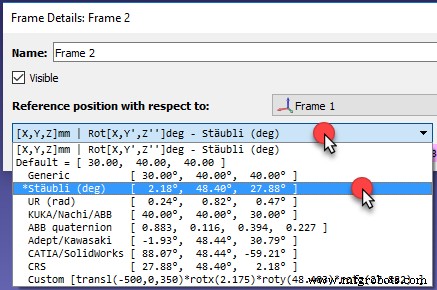
오일러 각은 로봇에서 공간의 위치와 방향을 나타내는 데 사용되는 방법입니다. 짜증나게도 모든 로봇 제조업체와 CAD/CAM 패키지는 오일러 각도에 대해 약간 다른 규칙을 사용하여 다른 좌표계에 대한 좌표계(포즈라고도 함)의 위치를 나타냅니다.
RoboDK는 모든 주요 로봇 제조업체의 오일러 각도 규칙을 지원합니다. 각 좌표계의 설정 또는 도구 메뉴> 옵션 창> 일반 탭의 기본 설정을 통해 사용되는 각각의 규칙을 변경할 수 있습니다.
오일러 각에 대한 완전한 소개는 로봇 오일러 각:필수 입문서 문서를 확인하십시오.
선호 사항이 무엇이든 RoboDK에는 옵션이 있습니다!
RoboDK를 어떻게 사용자 정의하시겠습니까? 아래 댓글로 알려주거나 LinkedIn, Twitter, Facebook, Instagram 또는 RoboDK 포럼에서 토론에 참여하세요.
산업용 로봇
RoboDK의 Raspberry Pi 버전은 산업용 로봇과 교육용 로봇 사용자 모두에게 놀라운 애플리케이션을 제공합니다! Raspberry Pi는 놀라운 도구입니다. 이전에 Raspberry Pi에 대해 들어본 적이 없다면 기본적으로 임베디드 애플리케이션을 개발하는 데 사용할 수 있는 작은 컴퓨터입니다. 지난 7년 동안 많은 취미 애호가와 교육 기술 사용자가 즐겨 찾는 개발 보드가 되었습니다. 그러나 라즈베리파이는 교육만을 위한 것이 아닙니다. 2019년 모델(3B+) 출시 이후 산업용 애플리케이션에도 진출하고 있다. 이제 누
픽 앤 플레이스 프로그래밍은 로봇 공학의 기본 기술입니다. 하지만 산업용 로봇을 위한 이 로봇 프로그램을 어떻게 빠르고 쉽게 만들 수 있습니까? RoboDK의 간단한 프로그래밍 인터페이스를 사용하면 단 몇 분 안에 픽 앤 플레이스 프로그램을 만들 수 있습니다. 간단한 픽 앤 플레이스 프로그래밍을 시작하는 방법은 다음과 같습니다. 산업용 로봇을 통한 픽 앤 플레이스의 이점 이것은 간단한 작업이며 아마도 가장 간단한 로봇 작업일 수도 있습니다! 로봇에 대한 계획이 더 발전되어 있더라도 더 복잡한 설정으로 이동하기 전에 이