

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
|
배경 스토리
친구들이 저를 Tinder로 만들어줬고 앱에 있는 대부분의 사람들처럼 저는 그것이 얼마나 단조로운지 금방 실망했습니다. 그러다가 내가 훨씬 더 나은 엔지니어라는 것을 깨달았고 잠재적인 짝이 되었기 때문에 주변에 있던 저렴한 스테퍼 모터로 이것을 조립했습니다. 이제 Bumble 또는 Tinder에서 이 기능으로 한 시간에 800번 이상의 스와이프를 할 수 있습니다!
빠른 개요:
이 빌드에는 세 가지 빠른 단계가 있습니다. 부품 인쇄, 배선 + 스테퍼 모터 테스트, 모든 것을 함께 조립하는 것입니다.
1단계:부품 인쇄
3D 인쇄 가능한 파일은 https://www.thingiverse.com/thing:2849598에서 확인하세요. 이 파일에서 주목해야 할 주요 사항은 베이스를 만들기 위해 50% 채우기를 사용했다는 것입니다. 이것은 스와이프할 때 움직이지 않도록 베이스의 무게를 줄이기 위한 것입니다.
2단계:스테퍼 모터
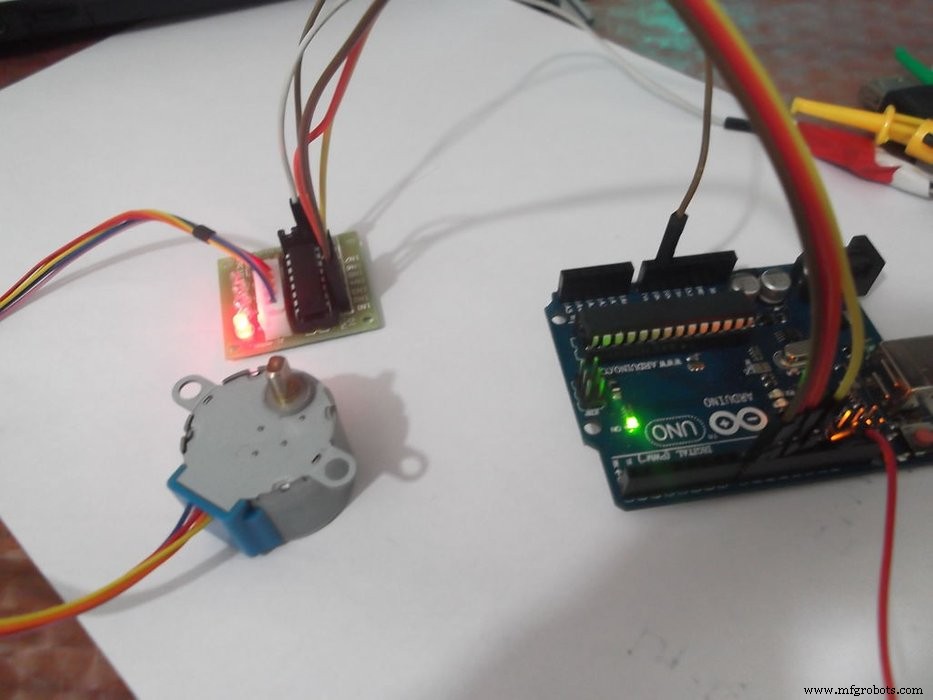
유니폴라 28-BYJ48 스테퍼 모터와 SBT0811 스테퍼 모터 드라이버를 사용했습니다. 28-BYJ48과 함께 작동하는 모든 스테퍼 모터 드라이버는 문제가 없습니다. 다음 설정에 따라 Arduino Uno에 연결하거나 변경 사항을 반영하기 위해 코드를 변경하십시오.
<울>Arduino Uno의 코드는 페이지 하단에 있습니다. 이 시점에서 코드를 Arduino에 업로드하고 시계 방향으로 회전하는 스테퍼 모터를 가질 수 있어야 합니다! 시계 반대 방향으로 회전하는 방향을 변경하려면 방향 을 전환하세요. 거짓에 대한 변수

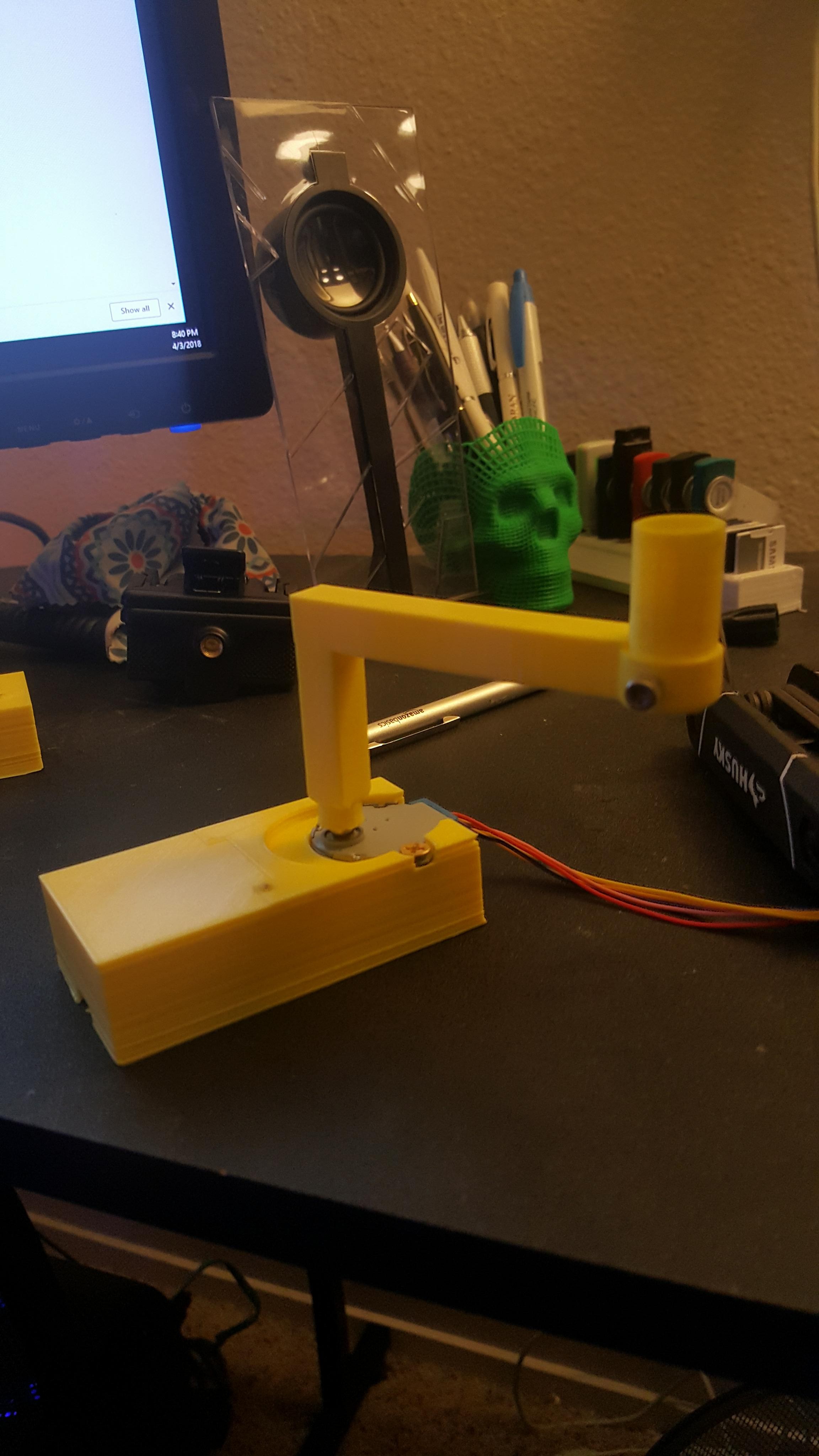
3단계:모든 것을 함께 배치하기
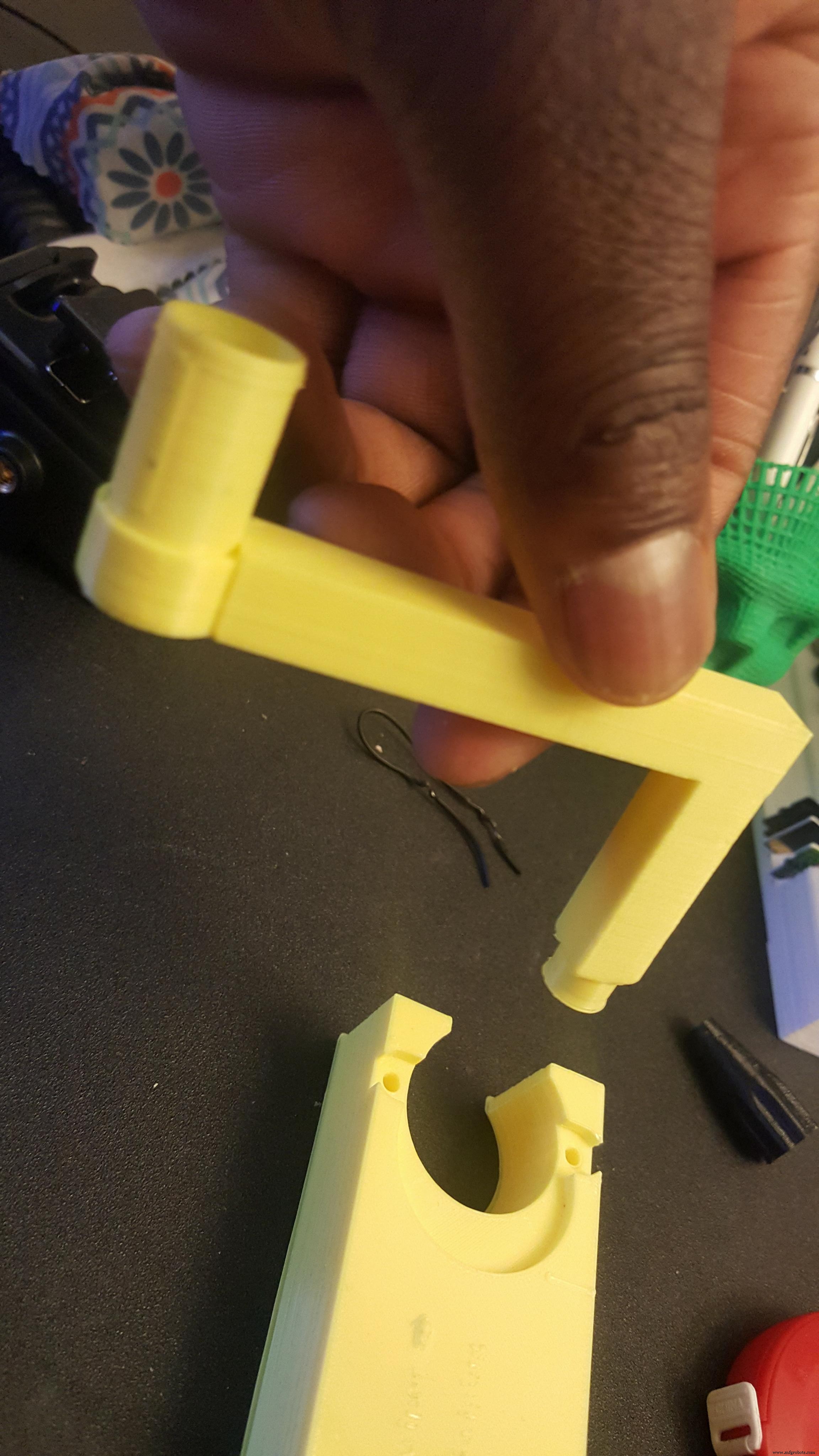
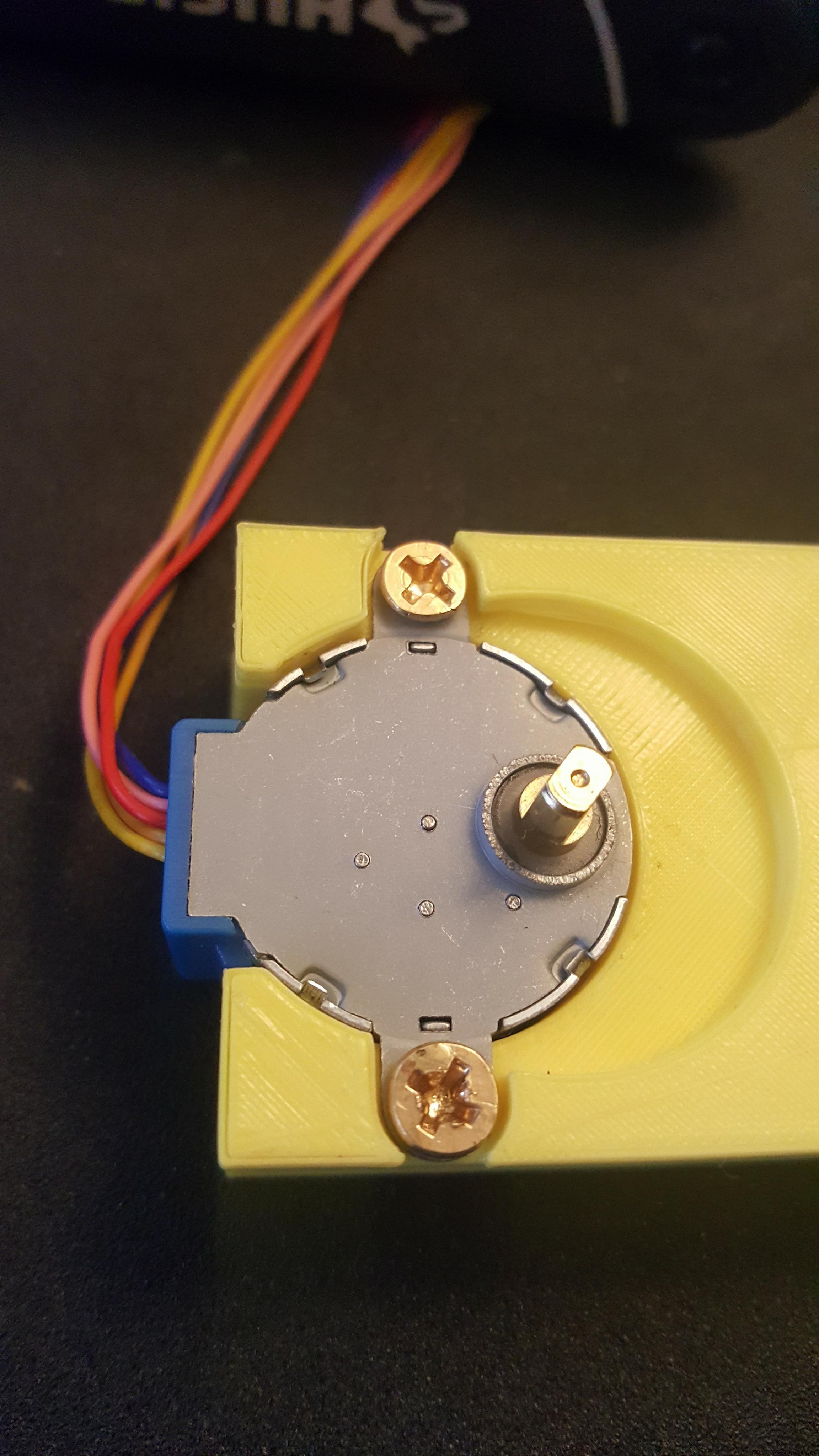
이 시점에서 모든 개별 부품이 준비되었으며 결합하기만 하면 됩니다! 먼저 스와이퍼 베이스 내부에 스테퍼 모터를 배치합니다. 2개의 작은 나무 나사를 사용하여 3D 프린트에 고정했습니다.
그런 다음 계속해서 스와이퍼 핸들을 스테퍼 모터에 놓습니다.
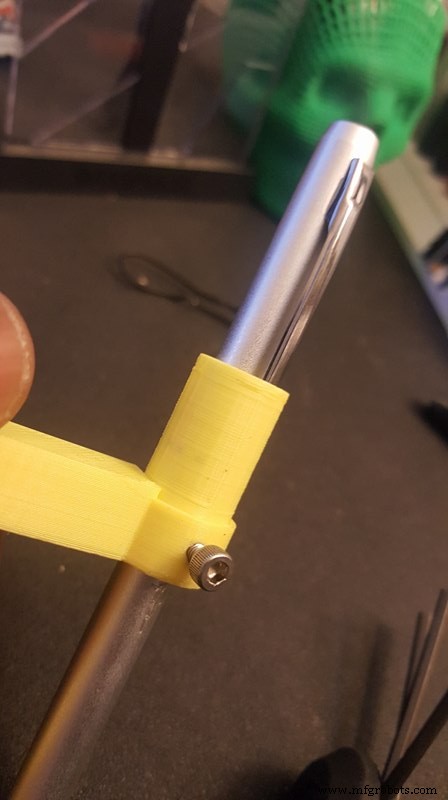
높이를 보정하기 위해; 전체 구조를 전화기 위에 놓고 터치스크린 펜이 화면에 닿을 때까지 터치스크린 펜을 스위퍼 핸들에 놓습니다.

이 시점에서 짧은 M3 나사를 사용하여 터치스크린 펜을 고정하여 스와이프할 때 움직이지 않도록 합니다.
마침내 스와이프하기
전체 구조를 전화기에 인접하게 놓고 원하는 데이트 앱을 열고 Arduino 앱을 켜고 앉으세요!
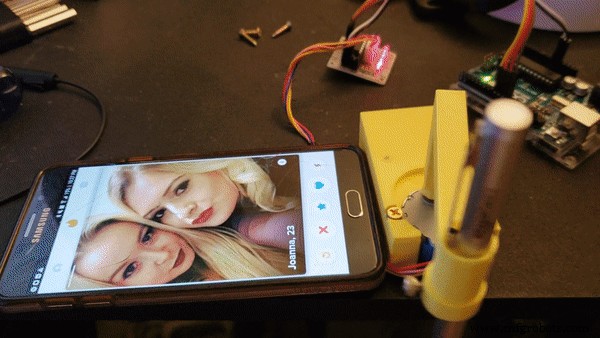
나는 4개의 다른 전화기에서 이것을 테스트했으며 전화기 중 하나는 스와이프를 올바르게 등록하는 데 문제가 있었고 이전 화면으로 이동했습니다. 이것은 마지막으로 테스트한 휴대전화의 가장자리가 매우 민감했기 때문입니다. 휴대전화를 가장자리가 돌출된 케이스에 넣어 이 문제를 해결할 수 있습니다. 이렇게 하면 터치스크린 펜이 화면 가장자리에 등록되지 않습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">/* BYJ48 스테퍼 모터 코드 연결:IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd 작성:Mohannad Rawashdeh https://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 */#define IN1 8#define IN2 9#define IN3 10#define IN4 11int 단계 =0; 부울 방향 =false; //오른쪽 swipeunsigned long last_time;unsigned long currentMillis;int steps_left=4095;long time;void setup(){Serial.begin(115200);pinMode(IN1, OUTPUT); 핀모드(IN2, 출력); 핀모드(IN3, 출력); 핀모드(IN4, 출력); // delay(1000);}void 루프(){ while(steps_left>0){ currentMillis =micros(); if(currentMillis-last_time>=1000){ 스테퍼(1); 시간=시간+마이크로초()-마지막_시간; last_time=마이크로(); steps_left--; } } steps_left=4095;}무효 스테퍼(int xw){ for (int x=0;x7){Steps=0;}if(Steps<0){Steps=7; }} 제조공정
스테퍼 모터 수리를 위해 회사를 선택하는 방법을 알려드리겠습니다. 스테퍼 모터란 무엇인가요? 스테퍼 모터는 전기 펄스의 변환에서 기계적인 움직임을 달성하는 전기 기계 장치입니다. 지속적으로 인가되는 전압이 아니라 디지털 펄스에 의해 구동됩니다. 지속적으로 회전하는 기존의 전기 모터와 달리 스테퍼 모터는 고정된 각도 증분으로 작은 단계로 회전합니다. 또한 위치 제어를 유지하기 위해 피드백이 필요한 서보 모터와 달리 스테퍼 모터는 디지털 명령을 따릅니다. 스테퍼 모터의 응용 스테퍼 모터는 위치 제어를 위한 많은 응용 분야에서 사
Sherline CNC 시스템 구성 요소 및 연결. 시스템 구성요소 1) 1-5/8″ 수동 핸드휠2) Z축 스테퍼 모터3) 스테퍼 모터 마운트4) 표준 액세서리가 있는 Sherline 수직 밀(그림은 모델 2000 밀)5) 백업 Linux/EMC2 설치 CD, Sherline 지침 CD6) Y축 스테퍼 모터7) X축 스테퍼 모터8) 선택적 A축용 케이블(CNC) 회전 테이블) 연결9) 키보드 및 마우스가 있는 컴퓨터10) 스테퍼 모터 전원 공급 장치용 켜기/끄기 스위치11) USB 드라이브 포트(전면)12) CD -RW 드라이