

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 |
 |
| |||
 |
|
 |
|
이 프로젝트는 4개를 사용합니다. Arduino 보드로 구동되는 저렴한 SSG 90 서보 모터. 3D 인쇄용.stl 파일은 아래 링크에서 다운로드하거나 Thingiverse 웹으로 직접 다운로드할 수 있습니다.
https://www.thingiverse.com/thing:1015238
이 로봇 팔을 만드는 방법에 대한 자세한 지침을 찾을 수 있습니다.
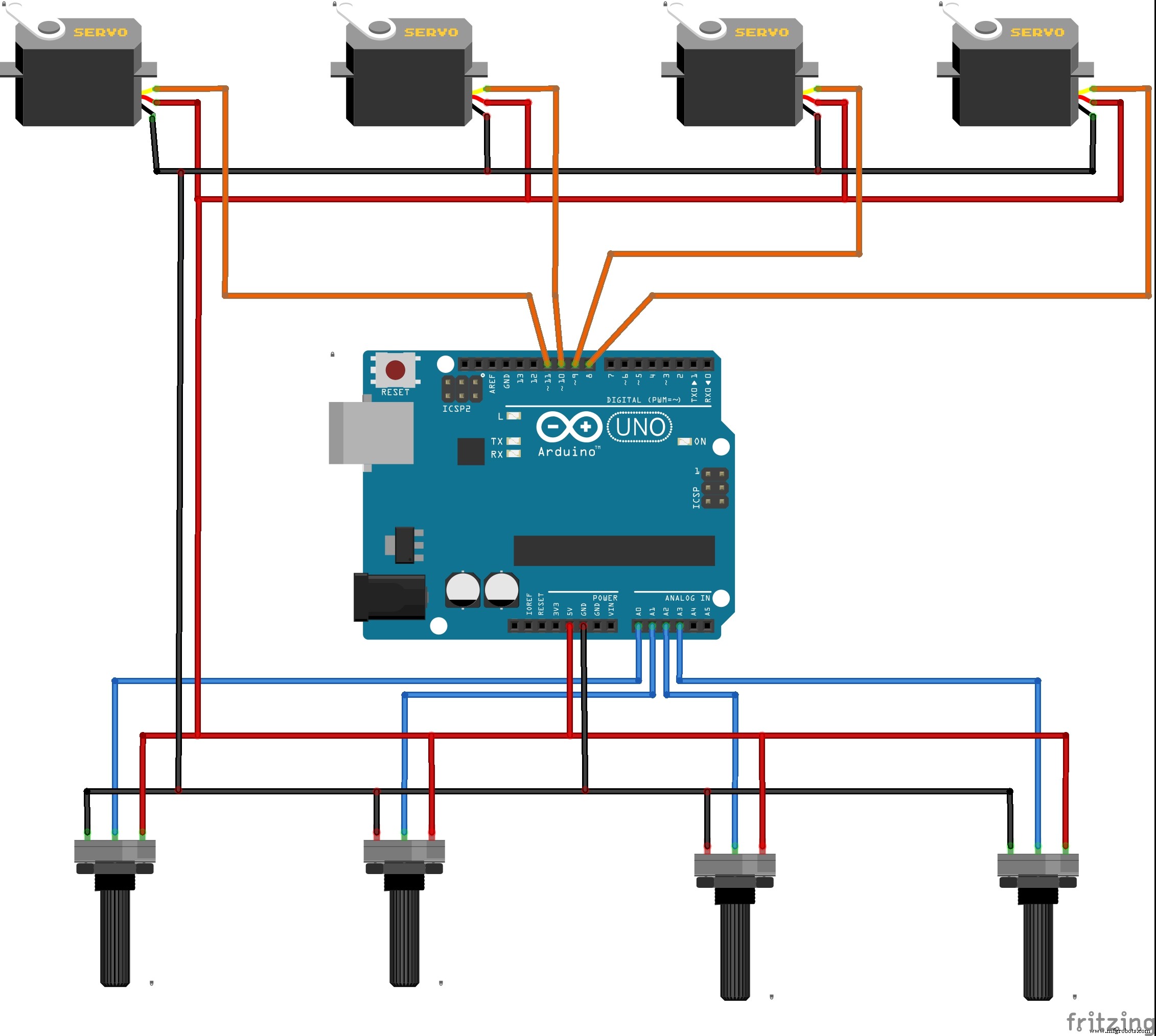
앞에서 언급했듯이 서보 모터는 Arduino 보드에서 구동됩니다. 이를 위해 각 서보가 적절한 전위차계로 제어되도록 간단한 코드도 작성했습니다. 약간의 운동 후에는 동영상에서 볼 수 있듯이 전위차계를 사용한 조작이 매우 쉽고 흥미로워집니다.
앞으로는 완전한 산업용 로봇이 될 서보 모터의 특정 움직임을 캡처하고 자동으로 수행하는 옵션으로 코드를 확장하려고 노력할 것입니다.
회로도는 아래 그림에서 볼 수 있습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">#include서보 마이서보; // 서보를 제어하기 위한 서보 객체 생성 myservo1;Servo myservo2;Servo myservo3;int potpin =0;// 전위차계를 연결하는 데 사용되는 아날로그 핀int potpin1 =1;int potpin2 =2;int potpin3 =3;int val; // 아날로그에서 값을 읽을 변수 pinint val1;int val2;int val3;void setup() { myservo.attach(8); // 8번 핀의 서보를 서보 객체에 연결합니다. myservo.attach(9); myservo.attach(10); myservo.attach(11);} 무효 루프() { val =analogRead(potpin); // 전위차계의 값을 읽습니다(0과 1023 사이의 값) val =map(val, 0, 1023, 0, 180); // 서보와 함께 사용하도록 크기 조정(0과 180 사이의 값) myservo.write(val); // 스케일된 값에 따라 서보 위치를 설정합니다. delay(15); // 서보가 거기에 도착할 때까지 기다립니다. val1 =analogRead(potpin1); 발1 =지도(발1, 0, 1023, 0, 180); myservo1.write(val1); 지연(15); val2 =analogRead(potpin2); 발2 =지도(발2, 0, 1023, 0, 180); myservo2.write(val2); 지연(15); val3 =analogRead(potpin3); 발2 =지도(발3, 0, 1023, 0, 180); myservo3.write(val3); 지연(15); }
제조공정
구성품 및 소모품 Arduino UNO × 2 SparkFun 트랜시버 브레이크아웃 - nRF24L01+(RP-SMA) × 2 Funduino 조이스틱 실드 V1.A × 1 SparkFun 듀얼 H-Bridge 모터 드라이버 L298 × 2 4WD 스마트 로봇 자동차 섀시 키트 × 1 LED(일반) × 3 저항 221옴 × 2 브레드보드(일반) × 2 18650 배터리
구성품 및 소모품 Arduino Nano R3 × 1 회전 전위차계(일반) × 7 SparkFun 푸시버튼 스위치 12mm × 7 MIDI 포트 × 1 저항 221옴 × 4 LED(일반) × 2 이 프로젝트 정보 2019년 3월 11일 업데이트 안녕하세요, 저는 아르페지에이터를 위한 새 펌웨어를 만들었습니다. 소스 코드가 완전히 다시 작성되었습니다. 이제 모듈식 구조를 통해 Arduino뿐만