

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
 |
| |||
 |
|
이 프로젝트의 아이디어는 제 딸에게서 나왔습니다.
그녀는 로봇을 원했고 이 로봇은 입을 벌려 음식을 입에 넣을 수 있습니다.
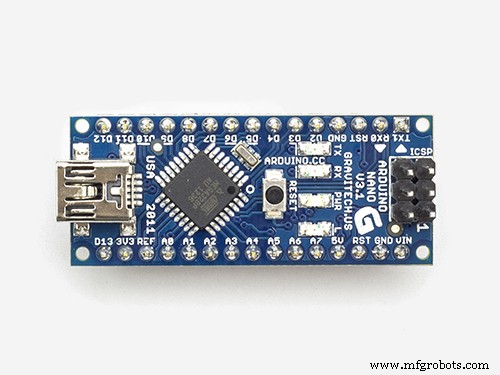
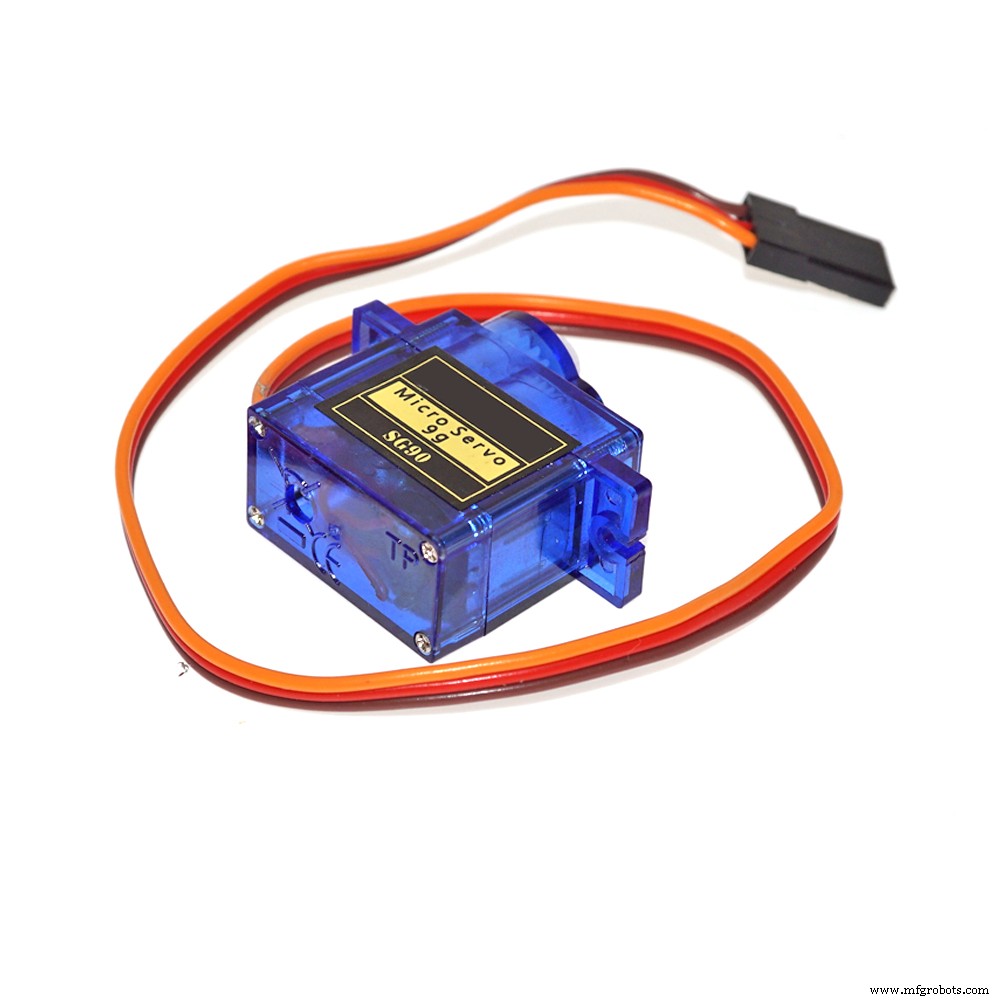
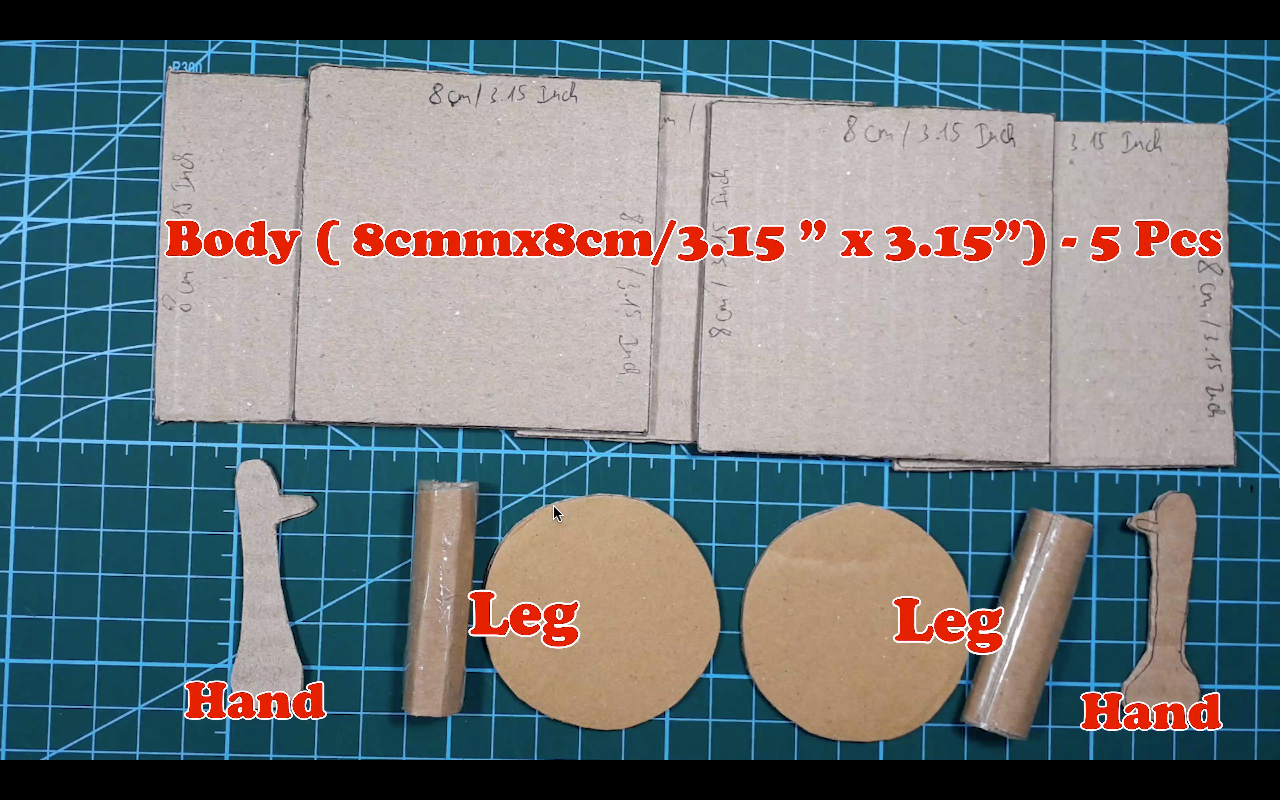
그래서 판지, Arduino Nano, 초음파 센서, 서보 모터 등 가능한 한 가장 빠른 시간에 가장 저렴한 비용으로 여자 아이들이 놀 수 있는 로봇을 만들기 위해 실내에서 구할 수 있는 것을 찾았습니다.
바디 만들기
판지를 사용하여 로봇 몸체를 만들고 있습니다.
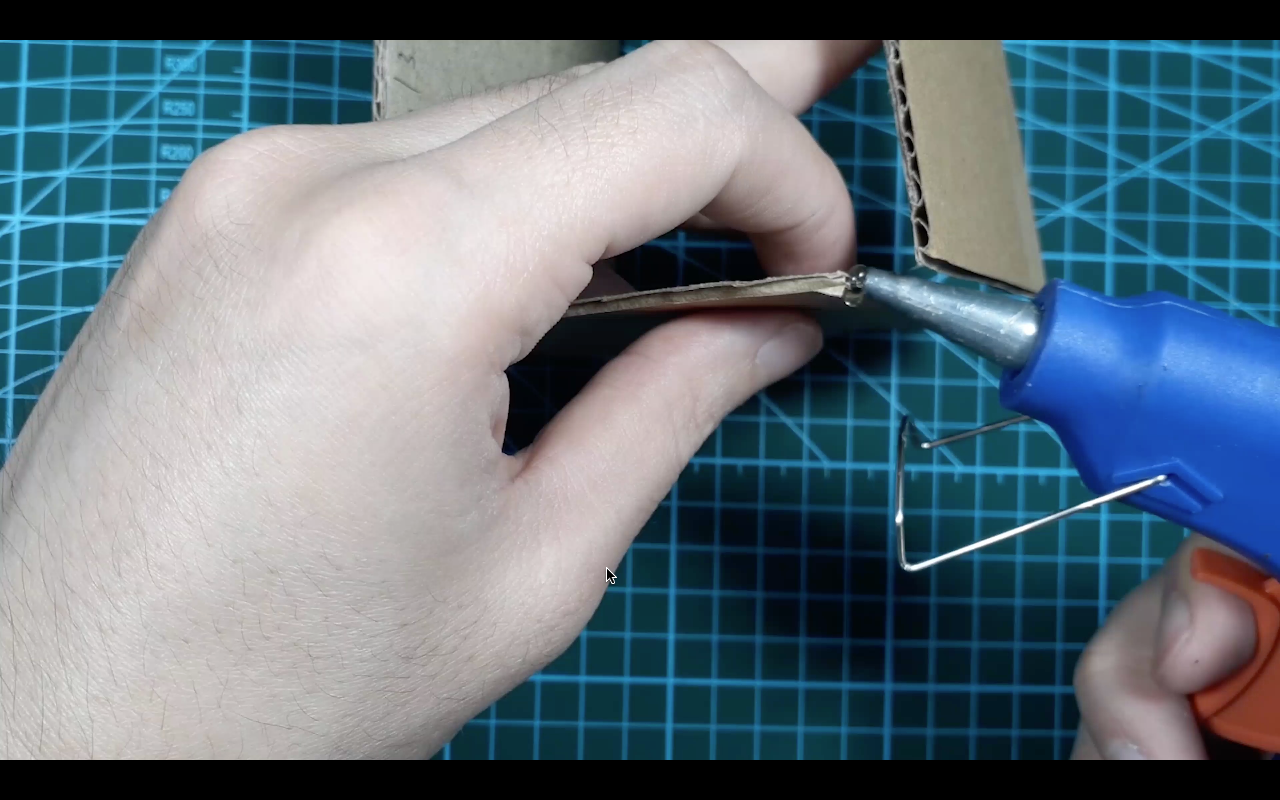
핫 글루를 사용하여 모든 부품 연결
대부분의 신체 활동

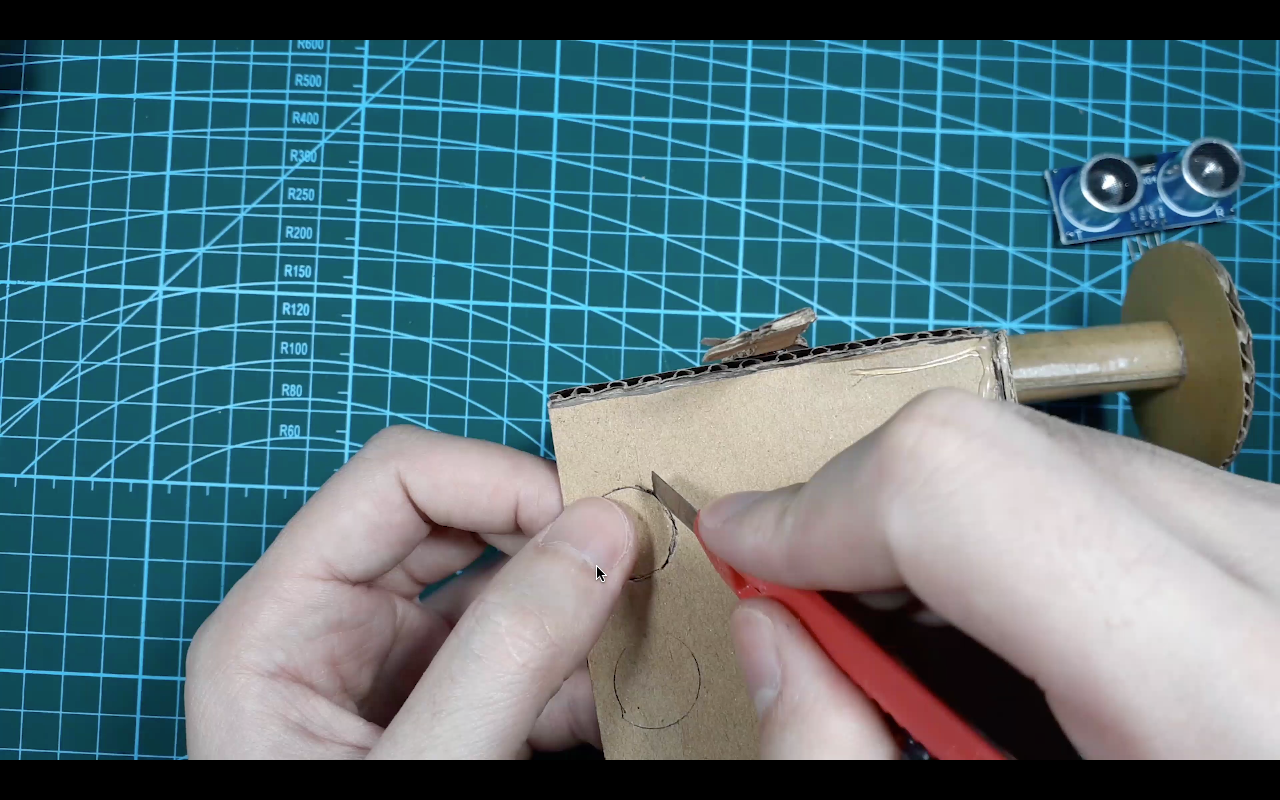
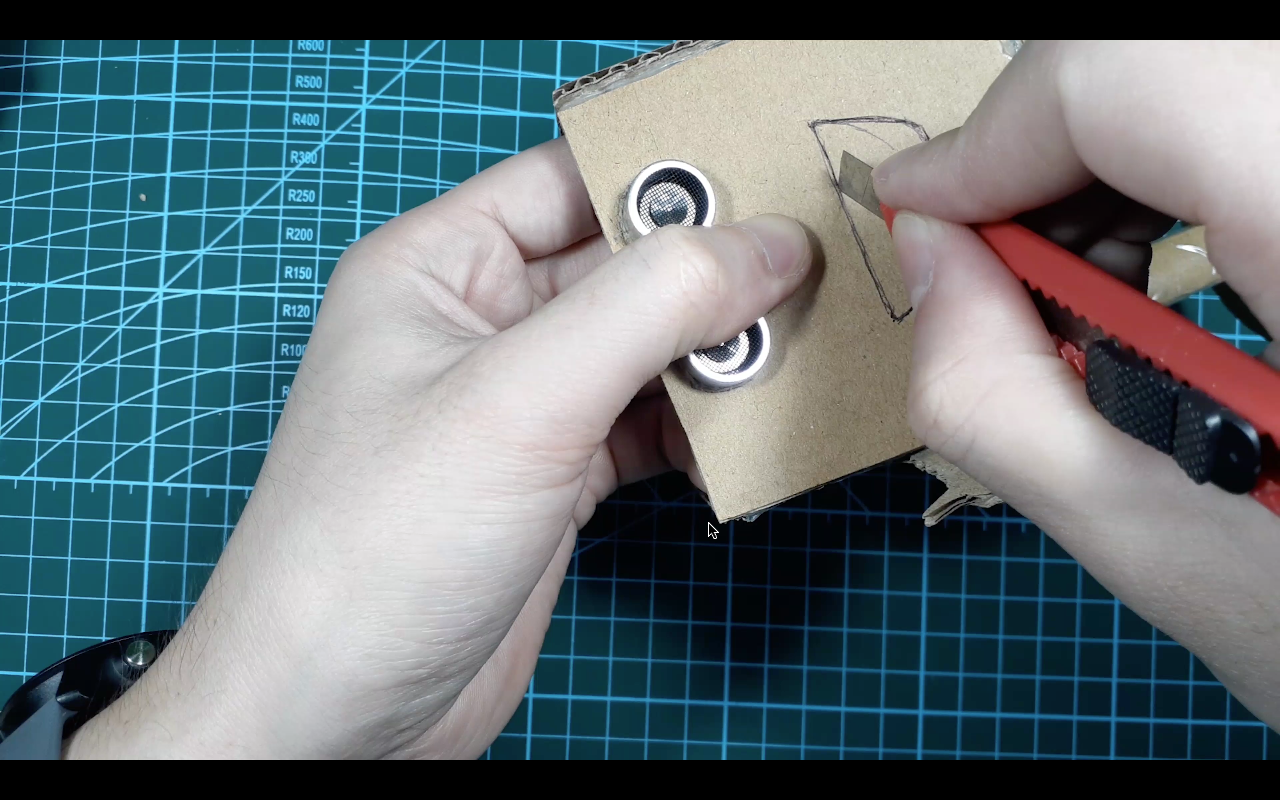
눈구멍 만들기
입 만들기
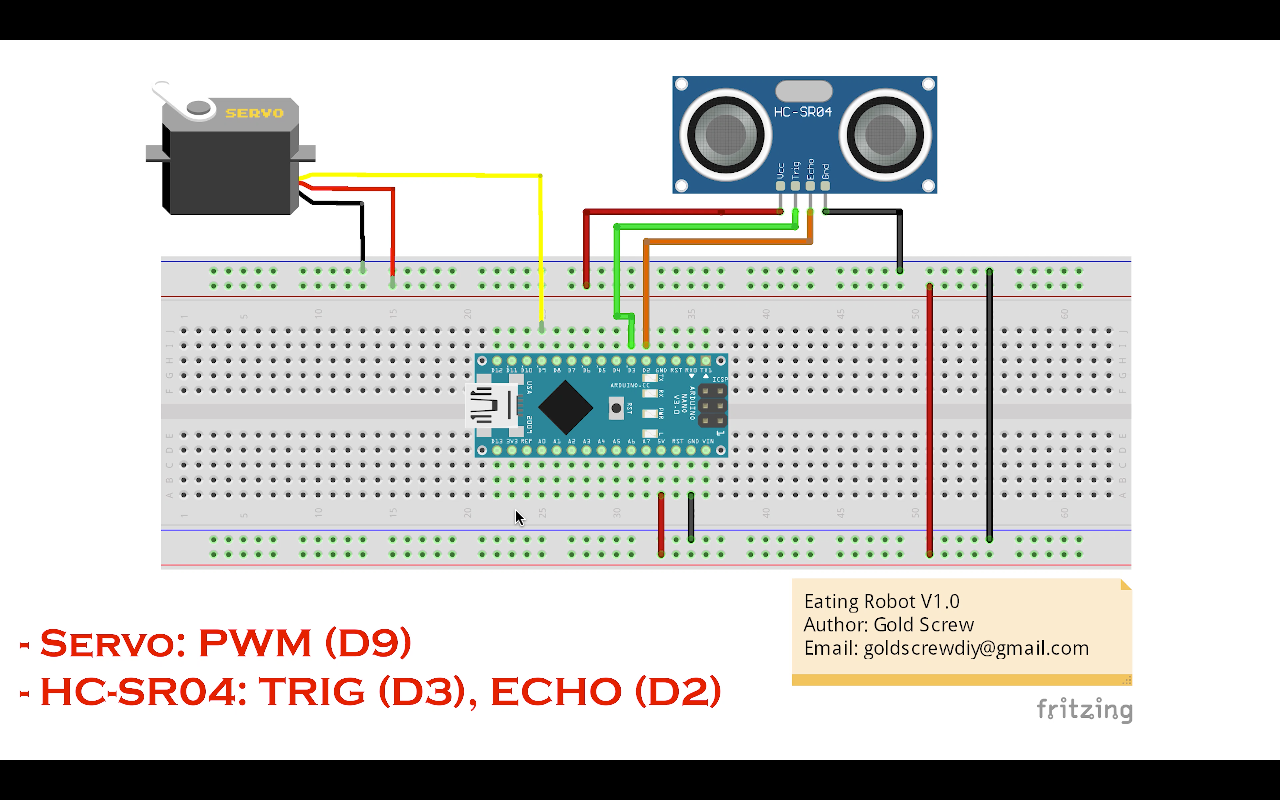
구성 요소/부품 연결 다이어그램
USB 전원 연결
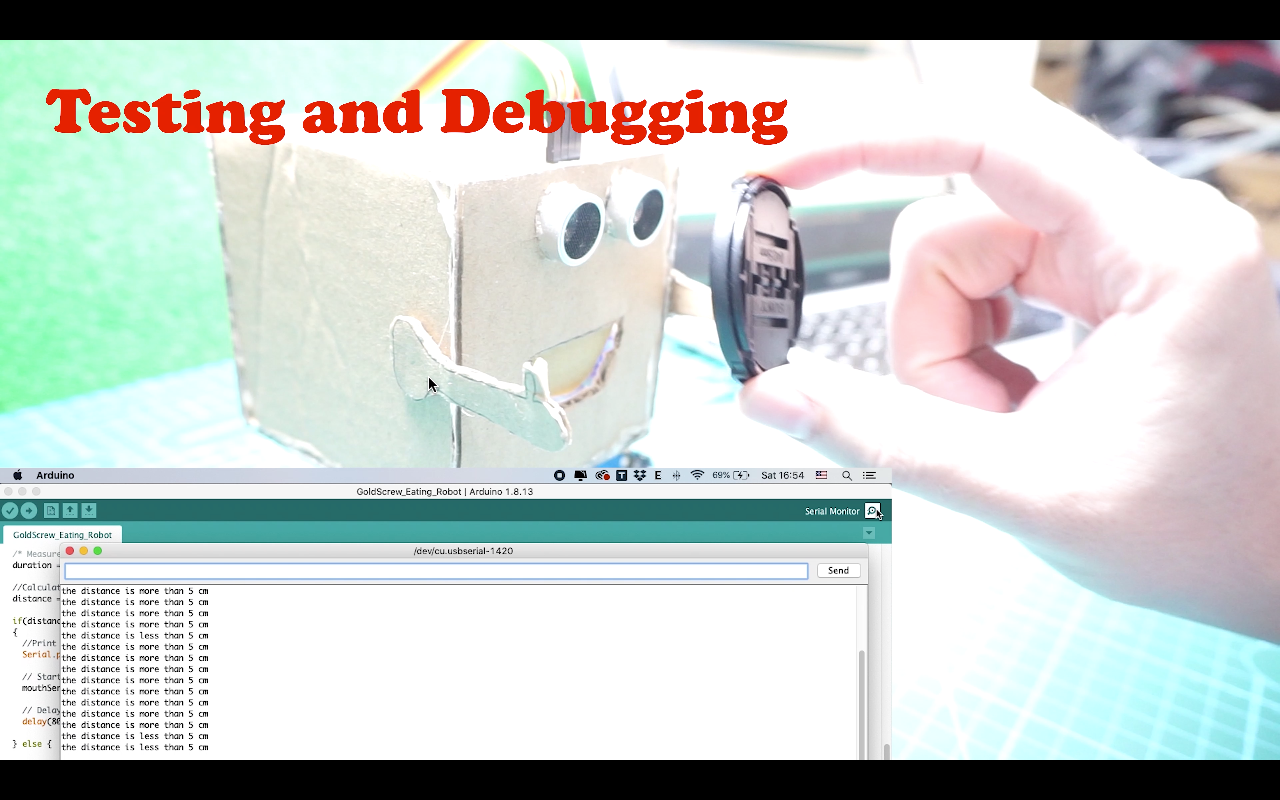
테스트 및 디버깅
완료되었습니다!

/* * 카트보드 먹는 로봇 * 저자:GoldScrew * 이메일:goldscrewdiy@gmail.com * 설명:HC-SR04(거리 <=5 cm로 음식 감지)와 서버(입을 열고 닫는) 사용 * / #include#define SERVO_PIN 9 // 서보용 핀 9 설정 // HC-SR04 초음파 sensorconst int trig =3; // HC-SR04의 삼각함수 const int echo =2; // HC-SR04의 에코// ServoServo mouthServo;void setup(){ // 전송 속도 960으로 직렬 연결 Serial.begin(9600); // TRIG pinMode(trig, OUTPUT)로 신호 보내기; // ECHO pinMode(echo, INPUT)로 신호 수신; // 입 서버 mouthServo.attach(SERVO_PIN); 입서보.쓰기(90); }void loop(){ /* Duration */ unsigned long duration; 정수 거리; //거리 /* TRIG 핀에서 신호 보내기 */ digitalWrite(trig, 0); //트리그 핀을 중지합니다. delayMicroseconds(2); //2마이크로초 지연 digitalWrite(trig, 1); // TRIG 핀에서 신호 보내기 delayMicroseconds(10); //10마이크로초 지연 digitalWrite(trig, 0); //중지 트리거 핀 /* ECHO 핀에서 HIGH 펄스 폭 측정 */ duration =pulseIn(echo, HIGH); //거리 계산 거리 =int(duration/2/29.412); if(distance <=5) { //거리 출력 Serial.println("거리가 5cm 미만입니다."); // 입을 벌리고 시작합니다.mouthServo.write(0); // 지연 지연(1200); } else { //거리 인쇄 Serial.println("거리가 5cm 이상입니다."); // 입을 닫습니다.Servo.write(90); } // 지연 지연(200);}
제조공정
이 튜토리얼에서는 맞춤형 Android 애플리케이션을 사용하여 무선으로 제어하고 프로그래밍할 수 있는 Arduino 로봇 팔을 만드는 방법을 배웁니다. 로봇 부품 설계 및 3D 프린팅, 전자 부품 연결 및 Arduino 프로그래밍부터 로봇 팔 제어를 위한 자체 Android 애플리케이션 개발에 이르기까지 전체 제작 과정을 보여 드리겠습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 앱의 슬라이더를 사용하여 로봇 팔의 각 서보 또는 축의 움직임을 수동으로 제어할 수 있습니다. 또한 저장 버튼을 사용
이 튜토리얼에서는 이전 비디오 중 하나에서 제작한 DIY 3D Printed SCARA 로봇 팔을 레이저 조각기로 변환하는 방법을 보여 드리겠습니다. 동영상 다음 동영상을 보거나 아래 기사를 읽을 수 있습니다. 프로젝트 개요 SCARA 로봇은 4개의 NEMA 17 스테퍼 모터로 구동되고 Arduino 보드를 사용하여 제어되는 4개의 자유도를 가지고 있습니다. 원본 비디오에서는 Arduino UNO 보드를 CNC Shield와 조합하여 사용했지만 이제는 Arduino MEGA 보드와 RAMP 보드를 함께 사용합니다. 로봇을 제어하