

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
구성 요소: <울>
여기에서 앱을 찾을 수 있습니다. https://play.google.com/store/apps/details?id=appinventor.ai_cempehlivan92.Arduino_Sesli_Kontrol
아이디어:
블루투스 모듈을 모바일 앱과 연결합니다. 완료되면 모바일을 통해 제공하는 명령이 모듈을 통해 Arduino로 전송됩니다. 앱에서 전송한 직렬 버퍼에서 문자 단위로 수신하고 이를 결합하여 문자열을 형성합니다.
그런 다음 명령과 비교합니다. 일치하면 명령이 수행됩니다. 예를 들어 수신한 문자열이 "Right"이면 봇은 우회전합니다.
연결:
여기에서 모든 연결 찾기:https://yainnoware.blogspot.com/p/voice-controlled-car.html
코드:
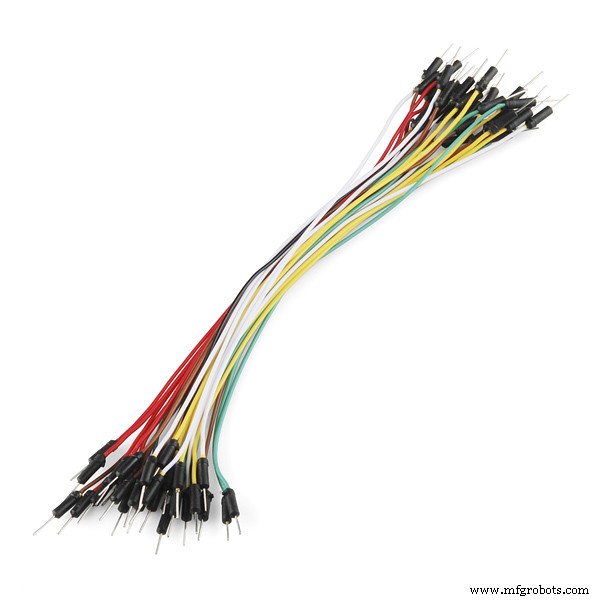
int motor_input1=11;int motor_input2=10;int motor_input3=5;int motor_input4=6;문자열 음성, 무효 설정() { Serial.begin(9600); 핀모드(모터입력1, 출력); //오른쪽 모터 pinMode(motor_input2, OUTPUT); //오른쪽 모터 pinMode(motor_input3, OUTPUT); //LEFT MOTOR 핀모드(motor_input4, OUTPUT); //LEFT MOTOR}void 루프() { while(Serial.available()>0) { delay(10); char c=Serial.read(); if(c=='#') { break; } 음성+=c; } if(음성=="앞으로"){ digitalWrite(motor_input1, LOW); 디지털 쓰기(모터_입력2, 높음); digitalWrite(모터_입력3, 낮음); 디지털 쓰기(모터_입력4, 높음); 지연(5000); } else if(음성=="뒤로"){ digitalWrite(motor_input1, HIGH); digitalWrite(모터_입력2, LOW); 디지털 쓰기(모터_입력3, 높음); digitalWrite(모터_입력4, LOW); delay(5000);} else if(voice=="left"){ digitalWrite(motor_input1, LOW); 디지털 쓰기(모터_입력2, 높음); 디지털 쓰기(모터_입력3, 높음); digitalWrite(모터_입력4, LOW); 지연(800); } else if(voice=="right"){ digitalWrite(motor_input1, HIGH); digitalWrite(모터_입력2, LOW); digitalWrite(모터_입력3, 낮음); 디지털 쓰기(모터_입력4, 높음); 지연(800); } if(음성.길이()>0) { Serial.println(음성); 음성=""; digitalWrite(모터_입력1, LOW); digitalWrite(모터_입력2, LOW); digitalWrite(모터_입력3, 낮음); digitalWrite(모터_입력4, LOW); } } 제조공정
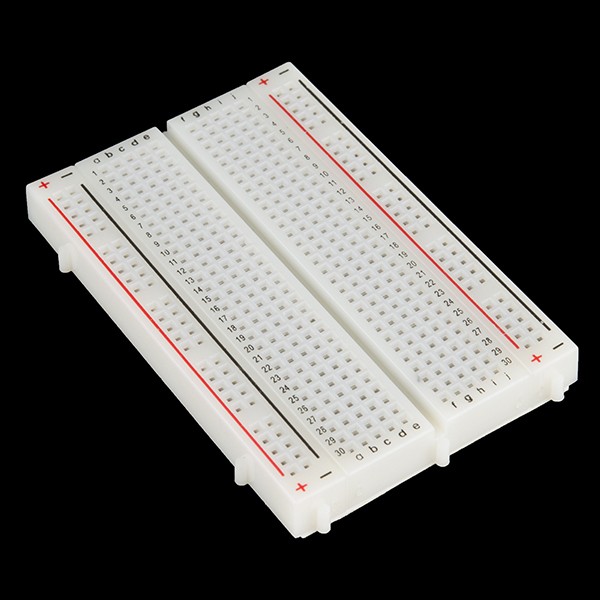
구성품 및 소모품 Arduino UNO × 1 브레드보드(일반) × 1 초음파 센서 - HC-SR04(일반) × 1 부저 × 1 LED(일반) × 3 저항 221옴 × 1 점퍼 와이어(일반) × 10 이 프로젝트 정보 1단계:자료 수집 2단계:설정 Arduino의 5V 핀에서 빨간색 와이어를 브레드보드의 양극 채널에 연결합니다. Arduino의 GND 핀에서
구성품 및 소모품 Arduino UNO × 1 Adafruit RGB 백라이트 LCD - 16x2 × 1 브레드보드(일반) × 1 저항 220옴 × 1 SparkFun 푸시버튼 스위치 12mm × 1 점퍼 와이어(일반) × 1 USB-A-B 케이블 × 1 앱 및 온라인 서비스 Arduino IDE 이 프로젝트 정보 필요한 부품은 위의 그림과