이 프로젝트 정보
인터넷에서는 수동으로 제어되는 유압식 또는 앱이나 다른 것을 사용하여 제어하는 로봇식의 두 가지 유형의 팔만 사용할 수 있습니다. 이 프로젝트는 이 둘의 조합입니다.
시작하기 전에 arduino 코딩 지식이 있는지 확인하세요.
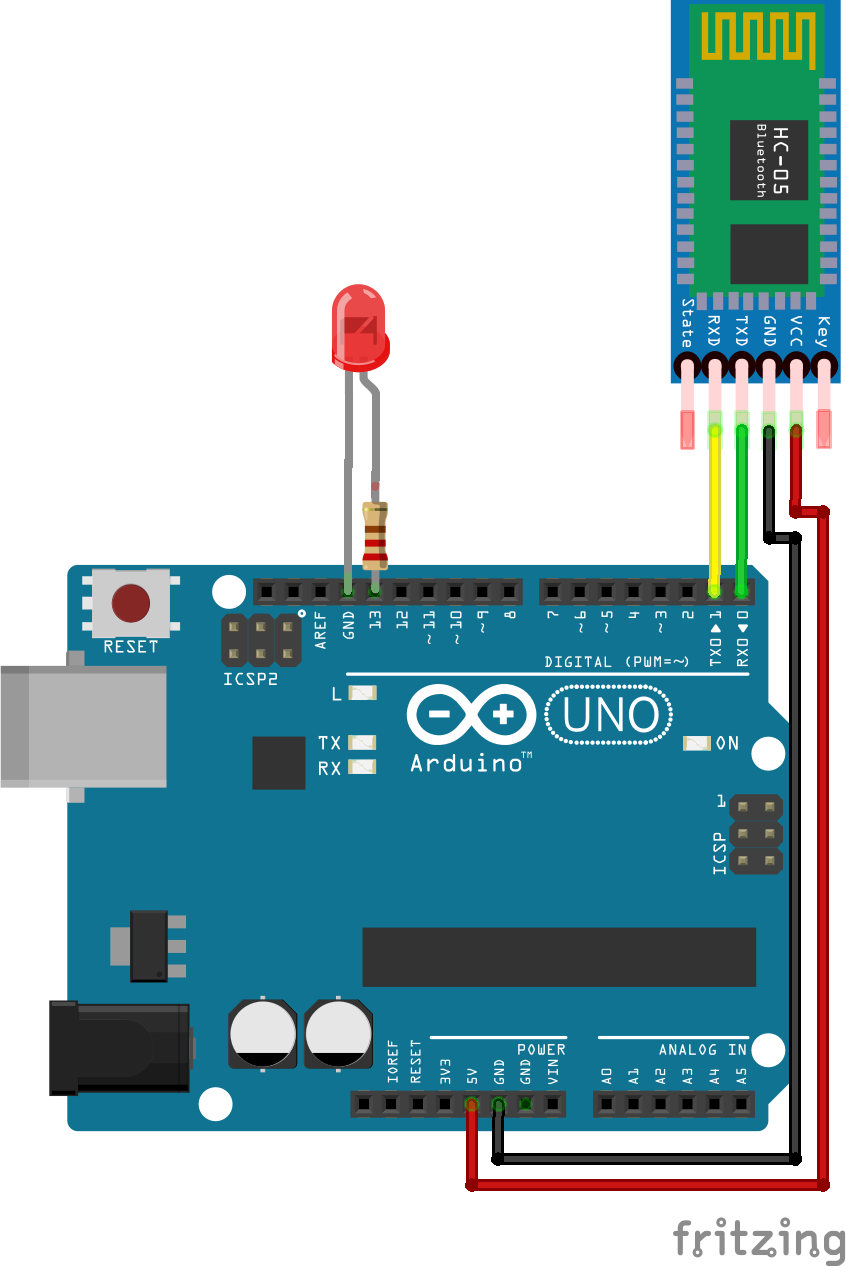
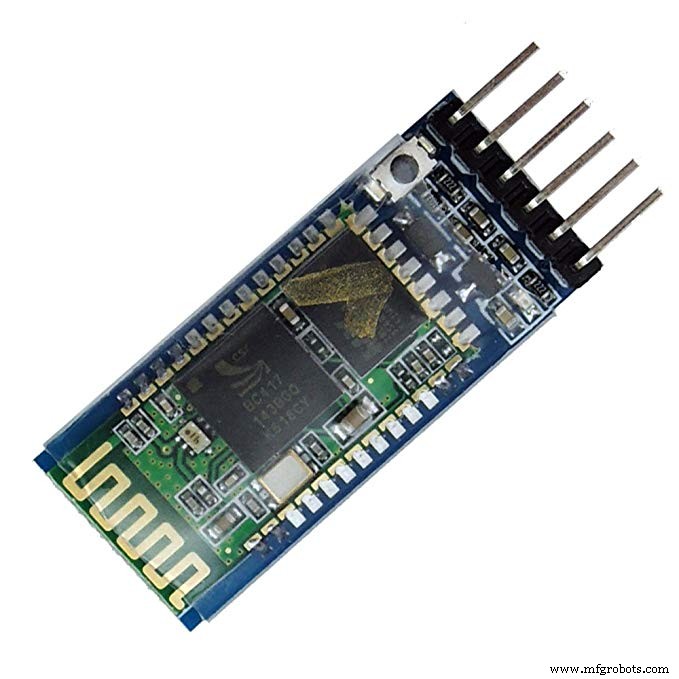
이런 식으로 arduino와 hc05를 연결합니다.
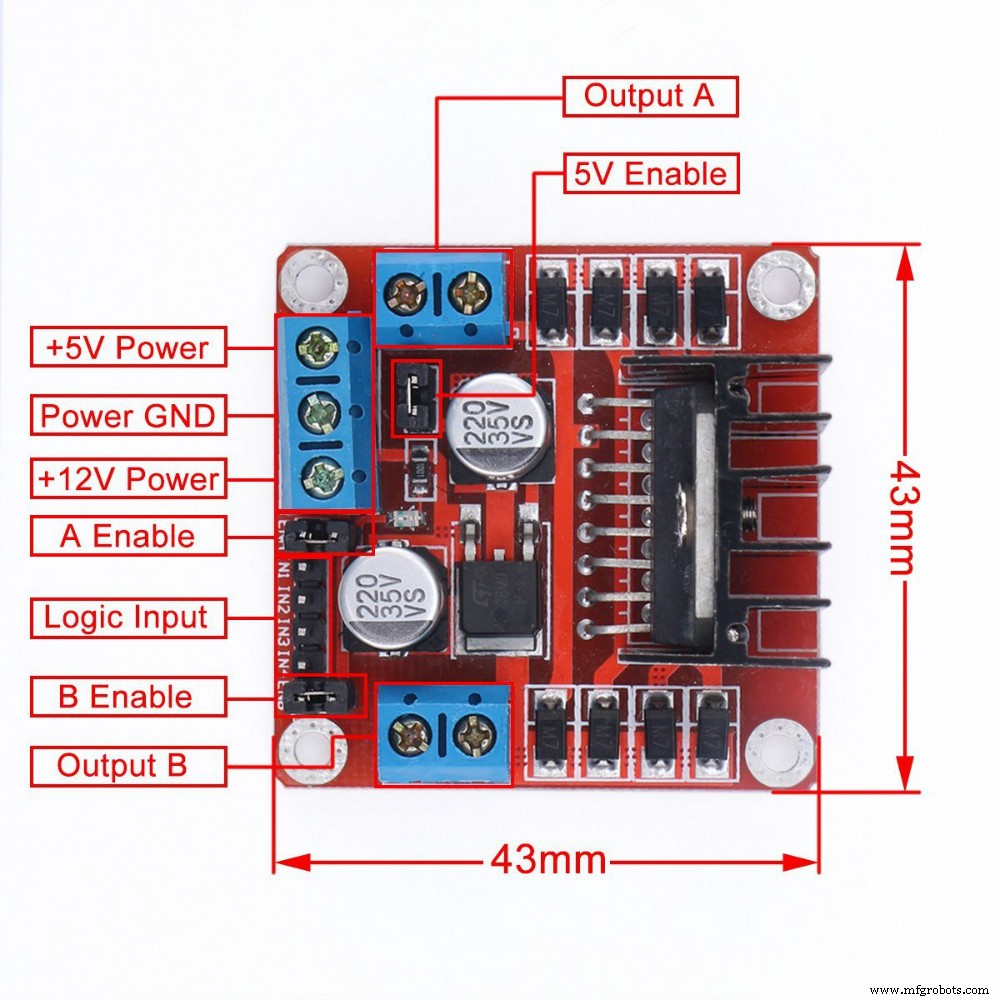
이것은 l298 모터 드라이버 [ena, in1, in2-motor A], [enb, in3, in4-motor B], ena &enb는 모터 A와 모터 B의 속도 제어용입니다.
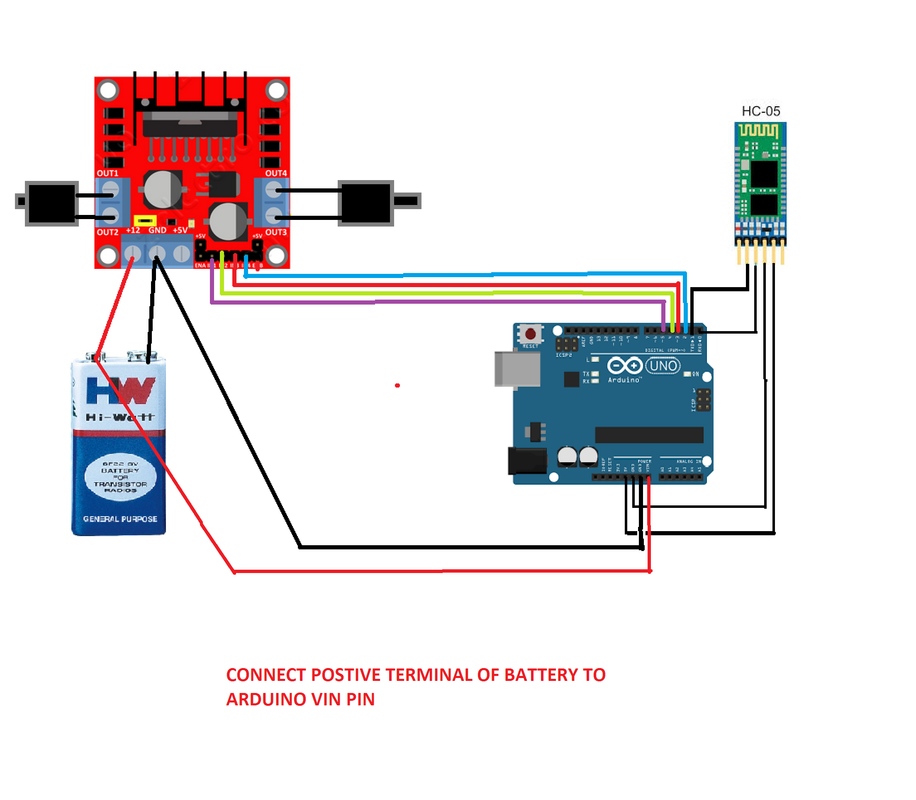
코드에 대한 자세한 설명을 제공하고 코드를 따라 회로를 만듭니다. 전원 공급 장치를 켜기 전에 모든 구성 요소를 올바르게 접지했는지 확인하십시오.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드"> 코드
<울> hydraulic.ino
hydraulic.inoArduino
// 1차 및 2차 모터 드라이버는 ARM 제어용입니다.// 3차 모터 드라이버는 LOCOMOTIVE 부품용입니다//1차 모터 드라이버 [BASE(2,3) AND SHOULDER(4,7)]int m1IN1 =2; //in1int m1IN2 =3; //in2int m1IN3 =4; //in3int m1IN4 =5; //in4int m1ENA =6; // 속도 제어를 위해 속도 제어는 여기에서 사용되지 않으므로 움직일 때 HIGH를 유지하고 motorint m1ENB =7; // 속도 제어의 경우 속도 제어를 사용하지 않으므로 이동 중일 때는 HIGH를 유지하고 모터를 정지하려면 LOW로 설정합니다. // 2차 모터 드라이버 [ELBOW(8,9) AND GRIPPER(12,13)]int m2IN1 =8; //in1int m2IN2 =9; //in2int m2IN3 =10; //in3int m2IN4 =11; //in4int m2ENA =12; // 속도 제어의 경우 속도 제어는 여기에서 사용되지 않으므로 움직일 때 HIGH를 유지하고 motorint m2ENB =13을 중지하려면 LOW로 만듭니다. // 속도 제어는 속도 제어를 사용하지 않으므로 이동 중일 때는 HIGH를 유지하고 모터를 정지하려면 LOW로 설정합니다. // 3rd Motor driver [CAR (INI,IN2)=RIGHT (IN3,IN4)=LEFT]int m3IN1=14; // in1 14- arduinoint의 A0 핀 m3IN2=15; // in2 15-A1int m3IN3=16; // in3 16-A2int m3IN4=17; // in4 17-A3int m3ENA=18; // ena 18-A4, 여기에서 속도 제어를 사용하여 기관차 부품의 속도를 제어할 수 있습니다. 이를 위해 digitalWrite()int m3ENB=19 대신 analogWrite()를 사용해야 하기 때문입니다. // enb 19-A5, 여기에서 기관차 부품의 속도를 제어하기 위해 속도 제어를 사용할 수 있습니다. 이를 위해 digitalWrite() 대신 analogWrite()를 사용해야 합니다. void setup(){ pinMode(m1IN1,OUTPUT); 핀모드(m1IN2,OUTPUT); 핀모드(m1IN3,OUTPUT); 핀모드(m1IN4, 출력); 핀모드(m2IN1, 출력); 핀모드(m2IN2,OUTPUT); 핀모드(m2IN3,OUTPUT); 핀모드(m2IN4,OUTPUT); 핀모드(m1ENA,OUTPUT); 핀모드(m1ENB, 출력); 핀모드(m2ENA,OUTPUT); 핀모드(m2ENB,OUTPUT); 핀모드(m3IN1, 출력); 핀모드(m3IN2, 출력); 핀모드(m3IN3,OUTPUT); 핀모드(m3IN4,OUTPUT); 핀모드(m3ENA, 출력); 핀모드(m3ENB,OUTPUT); Serial.begin(9600);}무효 루프(){ char ip='0'; while(Serial.available()>0) // 직렬 포트가 hc05에서 값을 수신하는지 여부를 확인합니다. { ip=Serial.read(); // 직렬 포트에서 데이터를 읽습니다. delay(10); } switch(ip) { case '6' :// SHOULDER UP digitalWrite(m1IN3,HIGH); 디지털 쓰기(m1IN4,LOW); digitalWrite(m1ENA,HIGH); 디지털 쓰기(m1ENB, 높음); 부서지다; case '5' // 어깨 아래로 digitalWrite(m1IN3,LOW); 디지털 쓰기(m1IN4, 높음); digitalWrite(m1ENA,HIGH); 디지털 쓰기(m1ENB, 높음); 부서지다; case '1' :// ELBOW UP digitalWrite(m2IN3,HIGH); 디지털 쓰기(m2IN4,LOW); digitalWrite(m2ENA,HIGH); 디지털 쓰기(m2ENB, 높음); 부서지다; case '2' :// ELBOW DOWN digitalWrite(m2IN3,LOW); digitalWrite(m2IN4,HIGH); digitalWrite(m2ENA,HIGH); 디지털 쓰기(m2ENB, 높음); 부서지다; case '8' // 그립 계약 digitalWrite(m2IN1,HIGH); 디지털 쓰기(m2IN2,LOW); digitalWrite(m2ENA,HIGH); 디지털 쓰기(m2ENB, 높음); 부서지다; case '7' // 그립 확장 digitalWrite(m2IN1,LOW); 디지털 쓰기(m2IN2,높음); digitalWrite(m2ENA,HIGH); 디지털 쓰기(m2ENB, 높음); 부서지다; case '3' :// BASE CLOCK digitalWrite(m1IN1,HIGH); 디지털 쓰기(m1IN2,LOW); digitalWrite(m1ENA,HIGH); 디지털 쓰기(m1ENB, 높음); 부서지다; case '4' // BASE ANTICLOCK digitalWrite(m1IN1,LOW); 디지털 쓰기(m1IN2, 높음); digitalWrite(m1ENA,HIGH); 디지털 쓰기(m1ENB, 높음); 부서지다; case '9' // OFF digitalWrite(m1IN1,LOW); 디지털 쓰기(m1IN2,LOW); 디지털 쓰기(m1IN3,LOW); 디지털 쓰기(m1IN4,LOW); 디지털 쓰기(m1ENA,LOW); 디지털 쓰기(m1ENB,LOW); 디지털 쓰기(m2IN1,LOW); 디지털 쓰기(m2IN2,LOW); 디지털 쓰기(m2IN3,LOW); 디지털 쓰기(m2IN4,LOW); 디지털 쓰기(m2ENA,LOW); 디지털 쓰기(m2ENB,LOW); 디지털 쓰기(m3IN1,LOW); 디지털 쓰기(m3IN2,LOW); 디지털 쓰기(m3IN3,LOW); 디지털 쓰기(m3IN4,LOW); digitalWrite(m3ENA,LOW); 디지털 쓰기(m3ENB,LOW); 부서지다; 케이스 'A' // FORWARD digitalWrite(m3IN1,HIGH); 디지털 쓰기(m3IN2,LOW); 디지털 쓰기(m3IN3, 높음); 디지털 쓰기(m3IN4,LOW); digitalWrite(m3ENA,HIGH); 디지털 쓰기(m3ENB, 높음); 부서지다; case 'D' // BACKWARD digitalWrite(m3IN1,LOW); 디지털 쓰기(m3IN2, 높음); 디지털 쓰기(m3IN3,LOW); 디지털 쓰기(m3IN4, 높음); digitalWrite(m3ENA,HIGH); 디지털 쓰기(m3ENB, 높음); 부서지다; case 'B' :// 오른쪽 digitalWrite(m3IN1,LOW); 디지털 쓰기(m3IN2, 높음); 디지털 쓰기(m3IN3, 높음); 디지털 쓰기(m3IN4,LOW); digitalWrite(m3ENA,HIGH); 디지털 쓰기(m3ENB, 높음); 부서지다; case 'C' // LEFT digitalWrite(m3IN1,HIGH); 디지털 쓰기(m3IN2,LOW); 디지털 쓰기(m3IN3,LOW); 디지털 쓰기(m3IN4,HIGH); digitalWrite(m3ENA,HIGH); 디지털 쓰기(m3ENB, 높음); 부서지다; }} 맞춤형 부품 및 인클로저
hydraulic_crane_J6NH7RouoB.apkuse m-seal은 모터에 너트를 맞춥니다. 
 m-seal을 사용하여 주사기의 피스톤에 너트를 고정합니다.
m-seal을 사용하여 주사기의 피스톤에 너트를 고정합니다.  시린지와 모터를 이렇게 고정
시린지와 모터를 이렇게 고정 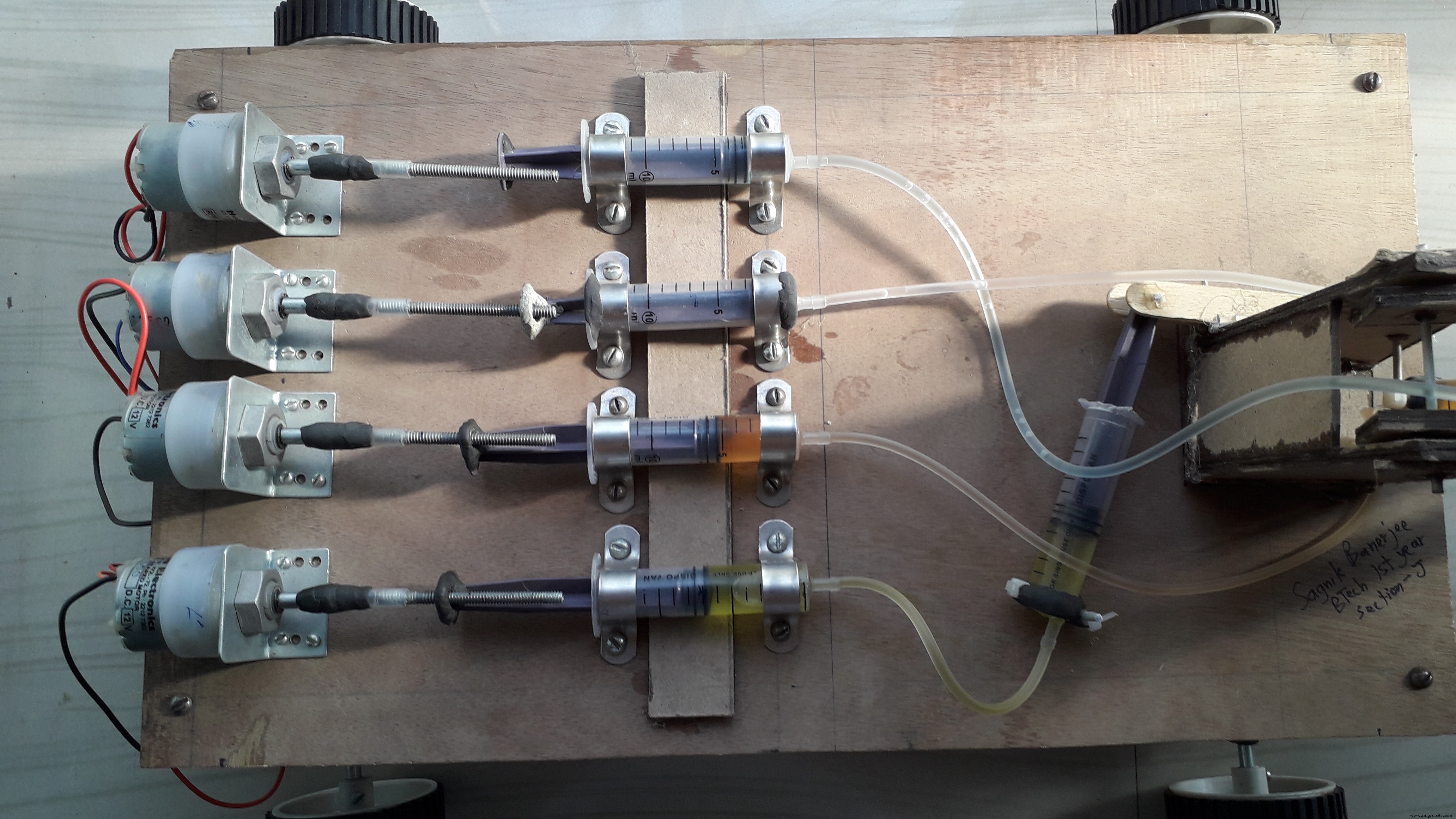 모터가 시계 방향으로 회전하면 피스톤을 밀고 시계 반대 방향으로 회전하면 피스톤을 당깁니다.
모터가 시계 방향으로 회전하면 피스톤을 밀고 시계 반대 방향으로 회전하면 피스톤을 당깁니다.  https://www.youtube.com/watch?v=lhOF6cViZ4Q
https://www.youtube.com/watch?v=lhOF6cViZ4Q