

감지기

산업 제조
연구원들은 회전익 무인 항공기(UAV)가 GPS의 도움 없이 움직이는 무인 지상 차량(UGV)에 착륙하고 이동하기 전에 재충전할 수 있는 접근 방식을 개발했습니다. 자율 항공 및 지상 요원으로 구성된 팀은 인간에게 너무 멀거나 위험하지만 종종 광범위한 위치 확인 및 통신 인프라가 필요한 수색 및 구조 환경에서 작전을 수행할 수 있습니다.
UAV의 중요한 기능은 정지 및 움직이는 지상 차량에 자율적으로 착륙하고 재충전한 다음 새로운 임무를 수행하기 위해 이륙하는 것입니다. UAV는 쉽게 방해를 받기 때문에 GPS에 의존할 수 없으므로 이러한 동작은 온보드 비전과 같은 다른 소스를 사용하여 수행해야 합니다.
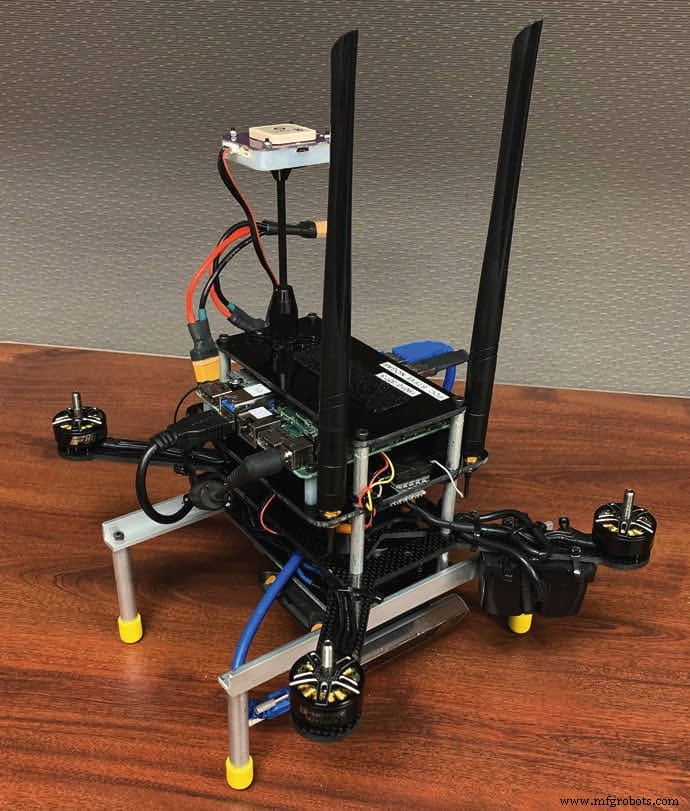
연구원들은 저렴한 센서와 컴퓨터를 사용하여 차량에서 계산을 수행했습니다. 또한 UAV와 UGV 간에 통신이 발생하지 않았습니다. 팀은 S/W 시뮬레이션과 실외 실험을 모두 수행했으며 알고리즘이 착륙 기동을 수행하는 데 효과적인지 시연했습니다. 연구원들은 조깅 속도에서 맞춤형 소형 쿼드로터와 UGV를 사용하여 착륙을 실험했습니다.
이 작업은 GPS 거부 동작과 실험적으로 입증된 동작을 결합합니다. 이 애플리케이션을 위해 설계된 지상 차량 상단의 고유한 마커인 시각적 관성 주행 거리 측정과 온보드 동작 및 제어를 통한 비전 기반 위치 파악을 사용합니다. 또한 이러한 동작은 상당한 계산 제약이 있는 소형 UAS에서 수행되었습니다.
지상 차량 상단의 맞춤형 마커는 착륙 작업을 위해 특별히 설계되었습니다. 카메라가 마커에 접근하더라도 볼 수 있는 더 큰 마커 안에 더 작은 마커가 포함되어 있습니다. 접근 방식은 지상 차량 상단의 기준 마커에 대한 의존도를 줄이고 착륙하려는 차량을 인식하는 인공 지능으로 대체할 수 있습니다.
감지기
추상 기술의 혁신으로 보안이 가장 큰 문제로 대두되고 있습니다. 기하급수적으로 증가하는 드론의 접근성은 일반 보안에 큰 위협이 되고 있습니다. UAV의 사용은 지난 몇 년 동안 증가했습니다. 여기에서 보안 문제를 염두에 두고 솔루션을 제안합니다. 먼저 UAV를 감지한 다음 경로를 추적합니다. 객체 감지의 경우 Computer Vision 딥 러닝 알고리즘이 매우 효과적입니다. 입력은 실시간 객체 감지 및 추적에 사용되는 신경망인 YOLO에 의해 처리됩니다. 2.1 UAV의 개념 이해 컴퓨터 비전을 이용한 UAV 탐지 및 추적이라
Long Island Heavy Equipment는 G.E.T 도구(Ground Engaging Tools) 및 소모품의 전체 라인을 출시합니다. 자세한 내용은 오늘 631-468-8851로 전화주십시오.