

산업기술

산업 제조
<메인 클래스="사이트 메인" id="메인">
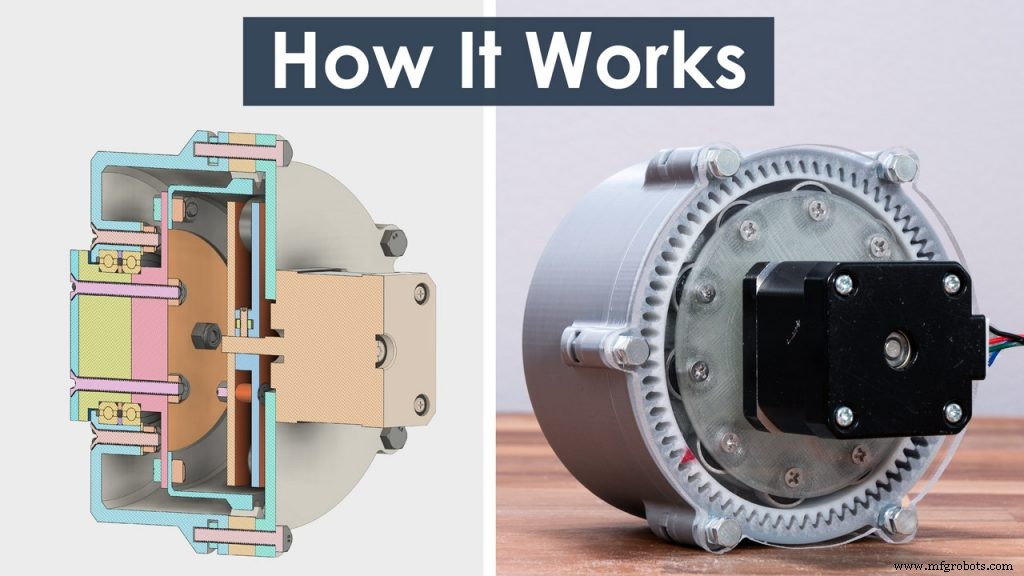
이 튜토리얼에서는 사이클로이드 드라이브가 무엇인지, 어떻게 작동하는지, 우리 자신의 모델을 설계하고 3D 프린팅하는 방법을 설명하여 실제 라이브로 보고 작동 방식을 더 잘 이해할 수 있도록 합니다.
다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다.
사이클로이드 드라이브는 작지만 견고한 디자인으로 매우 높은 감속비를 제공하는 독특한 유형의 감속기입니다. 스퍼 및 유성 기어와 같은 기존 기어 드라이브와 비교할 때 동일한 공간 또는 스테이지에서 최대 10배의 훨씬 더 높은 감속비를 달성할 수 있습니다. 그 외에도 사실상 백래시가 없고, 더 높은 부하 용량, 강성, 최대 90%의 고효율이 특징입니다. 이러한 특성으로 인해 사이클로이드 드라이브는 로봇 공학, 공작 기계, 제조 장비 등과 같이 위치 정확도와 성능이 중요한 많은 응용 분야에 적합합니다.
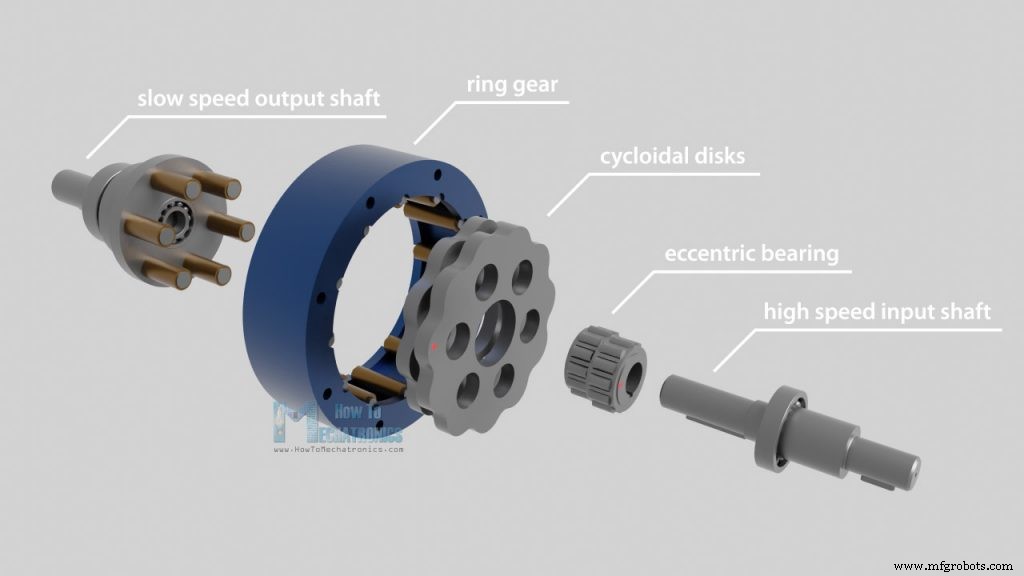
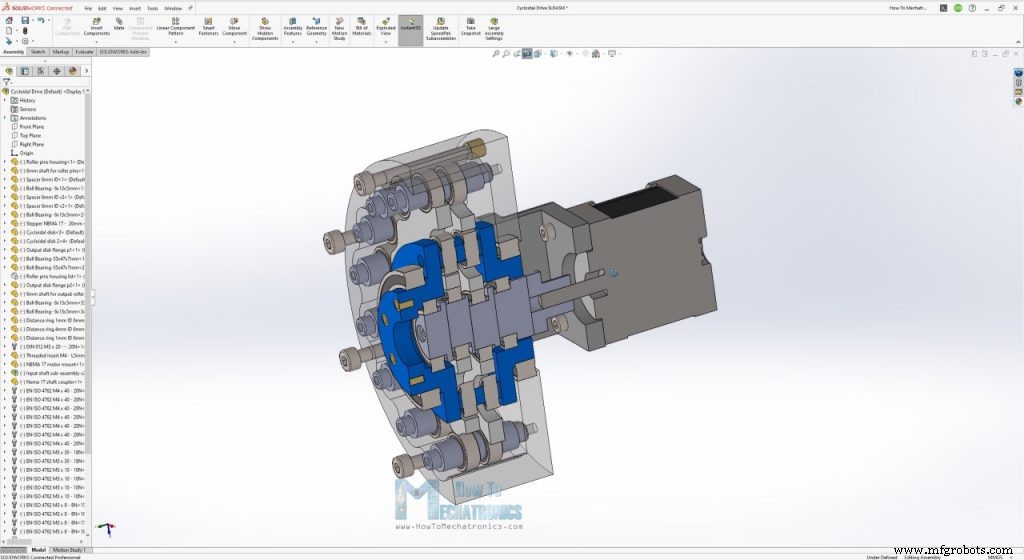
이제 내부에 무엇이 있고 사이클로이드 드라이브가 작동하는지 살펴보겠습니다. 사이클로이드 드라이브는 고속 입력 샤프트, 편심 베어링 또는 사이클로이드 캠, 두 개의 사이클로이드 디스크 또는 캠 팔로워, 핀과 롤러가 있는 링 기어, 핀과 롤러가 있는 저속 출력 샤프트의 5가지 주요 구성 요소로 구성됩니다.
입력 샤프트는 편심 베어링을 구동하고 편심 베어링은 링 기어 하우징의 내부 둘레 주위에 사이클로이드 디스크를 구동합니다. 편심 운동으로 인해 사이클로이드 디스크의 톱니 또는 로브가 링 기어 하우징의 롤러와 결합하여 감소된 속도로 역회전합니다.
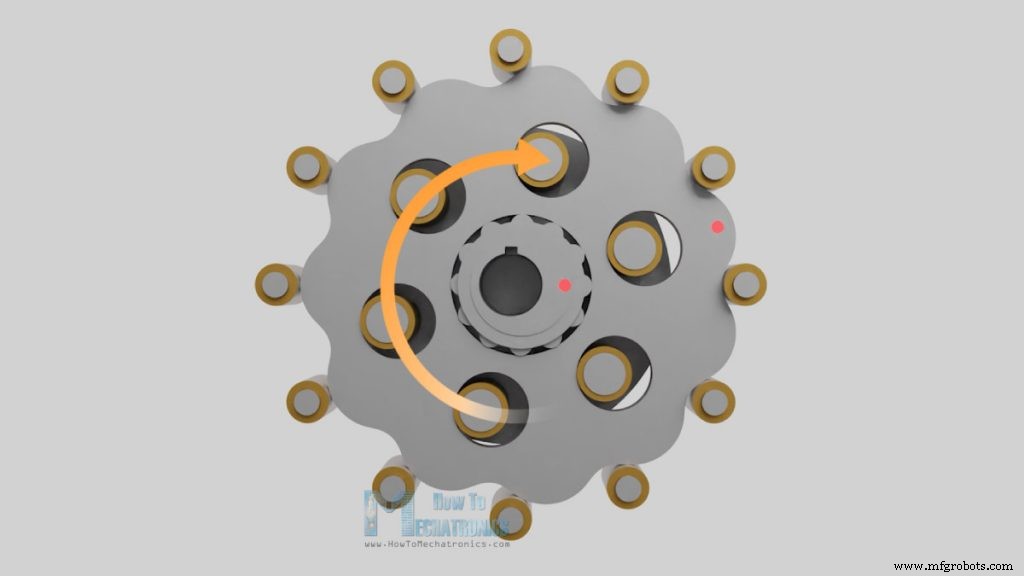
여기에서 자세히 살펴보면 편심 베어링이 실제로 링 기어 롤러에 대해 사이클로이드 디스크를 밀고 있음을 알 수 있습니다.
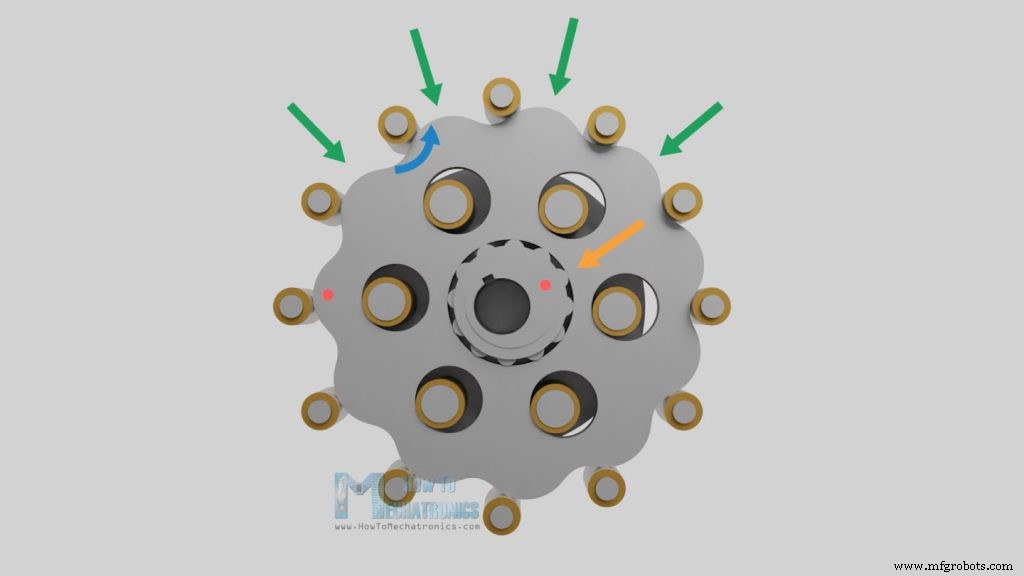
독특한 디스크 모양과 링 기어 롤러에 대한 위치 때문에 편심 베어링이 진행됨에 따라 회전 앞의 디스크 로브가 다음 링 기어 롤러를 통과하거나 점프할 수 없지만 대신 미끄러지거나 뒤로 굴러갑니다. 이 동작이 실제로 디스크의 역회전을 유발합니다.
일반적으로 링 기어 하우징의 핀 수에 비해 디스크에는 사이클로이드 로브가 하나 적습니다. 이렇게 하면 편심 베어링이 한 번 완전히 회전할 때 사이클로이드 디스크가 한 로브의 거리만 이동합니다. 이것으로부터 우리는 감속비가 오로지 링기어의 핀 수에 의존한다는 것을 알 수 있습니다.
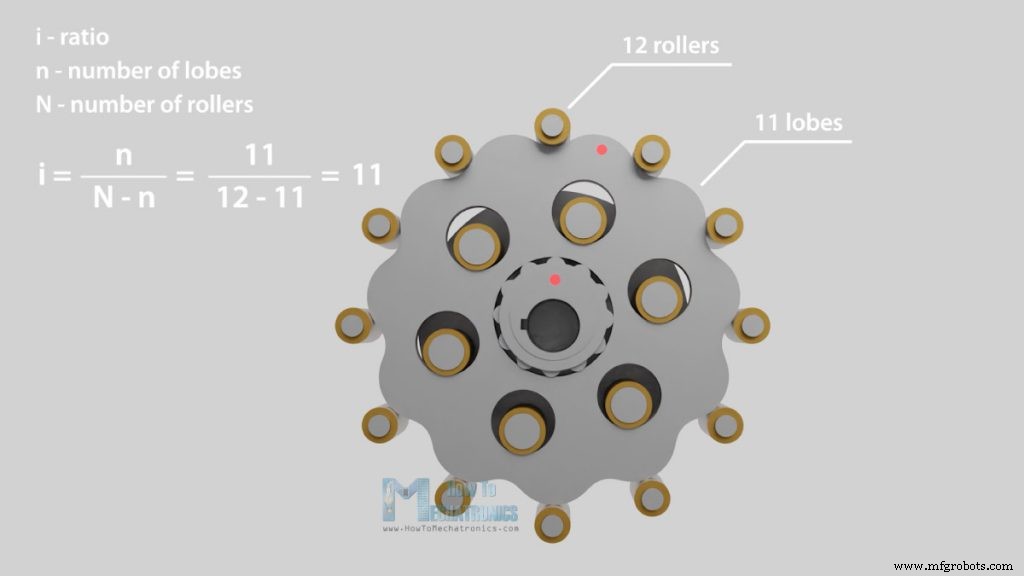
예를 들어, 여기 링 기어에 12개의 핀이 있습니다. 이는 사이클로이드 디스크에 11개의 로브를 의미하며 이는 11:1의 비율 또는 11배 느린 출력 속도입니다. 디스크, 링 기어 롤러 또는 편심 베어링의 크기는 감속비에 전혀 영향을 미치지 않습니다.
감소된 회전은 사이클로이드 디스크의 구멍을 통해 출력 샤프트 핀으로 전달됩니다.
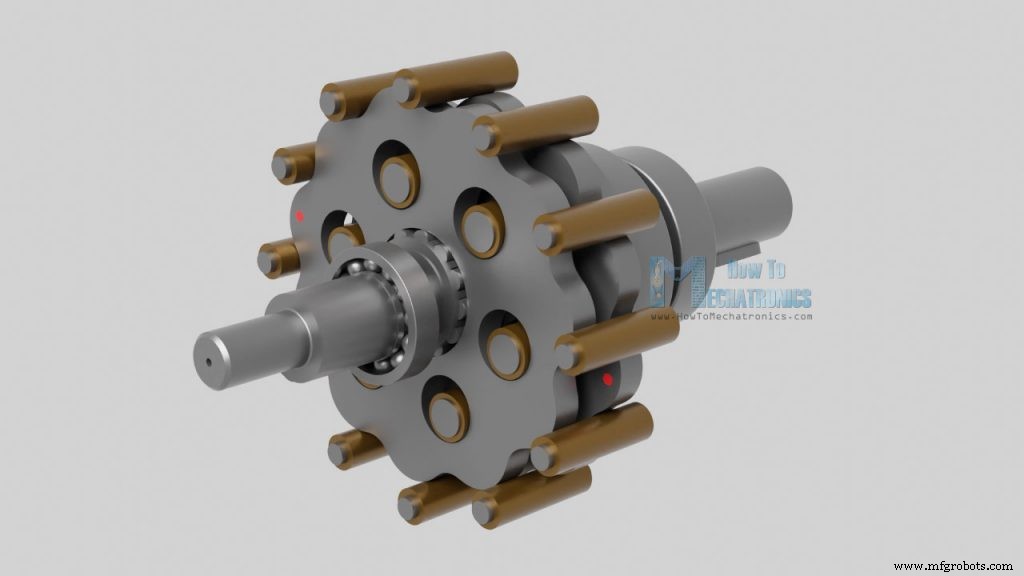
편심 운동으로 인한 불균형 힘을 보상하고 더 높은 속도에서 더 부드러운 작동을 제공하기 위해 위상이 180도로 배치된 두 개의 사이클로이드 디스크가 있습니다.
Cycloidal 드라이브라는 이름은 디스크의 프로필에서 유래한 것으로, 이 디스크는 Cycloid에서 유래하지만 이에 대한 자세한 내용은 다음 동영상 섹션에서 자체적으로 Cycloidal 드라이브를 설계할 것입니다.
이제 사이클로이드 드라이브의 작동 방식을 알았으므로 3D 인쇄가 가능한 자체 모델을 설계할 수 있습니다. 이 데모 예제를 3D 인쇄하려고 하면 작동할 수 있지만 3D 인쇄 재료가 기어박스에 나타나는 힘과 마찰을 견딜 만큼 충분히 강하지 않기 때문에 빨리 실패합니다.
중요한 부품은 일반적으로 부싱인 롤러로 재질이 금속인 경우 훌륭한 옵션이지만 PLA 재질의 경우 대신 볼 베어링을 사용해야 합니다.
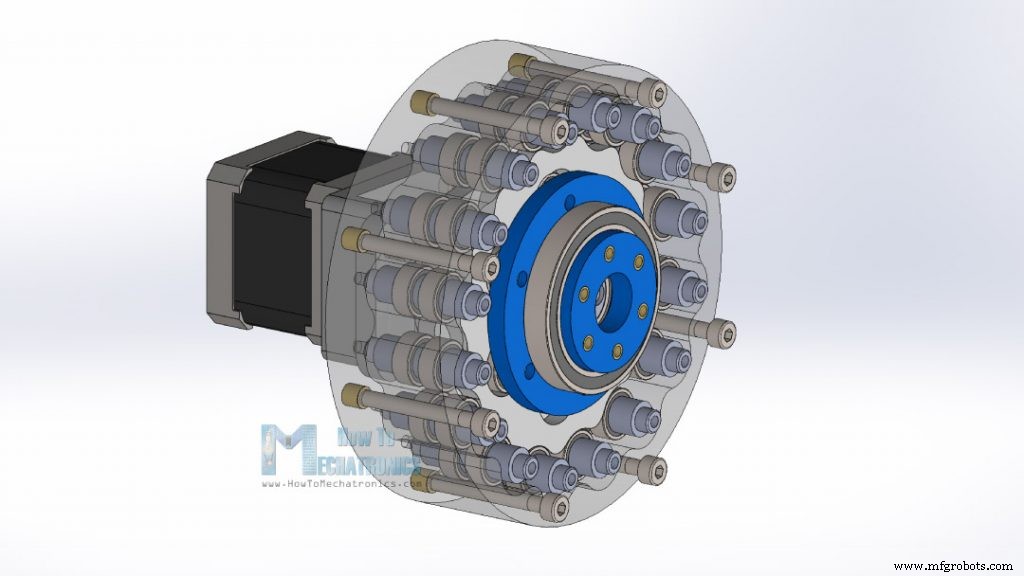
이를 염두에 두고 롤러용 볼 베어링을 설계하고 사용하는 사이클로이드 드라이브가 있습니다.
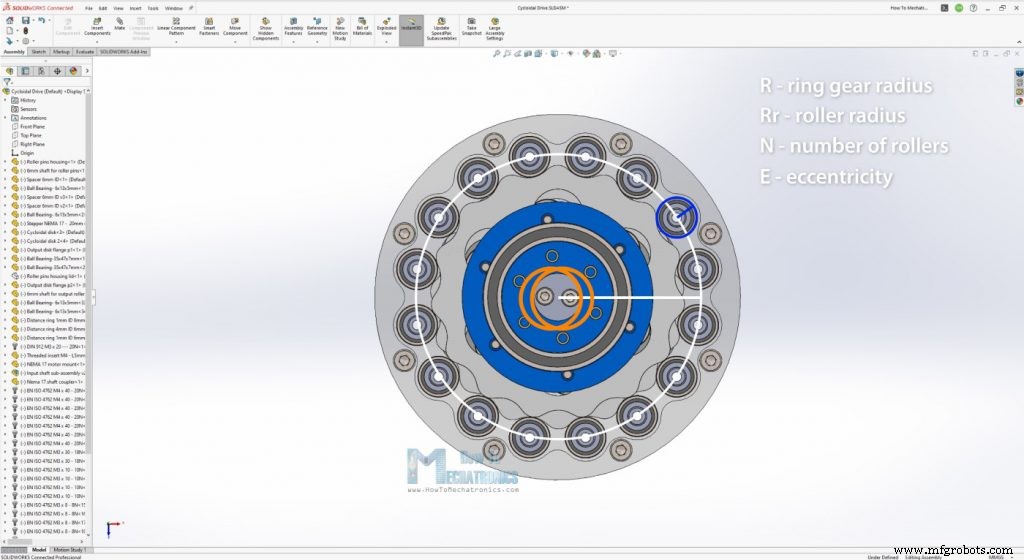
사이클로이드 드라이브를 설계할 때 사이클로이드 디스크의 크기와 모양을 정의하는 네 가지 주요 입력 매개변수가 있으며, 이는 링 기어 반경, 롤러 반경, 이러한 롤러의 수 및 편심입니다.
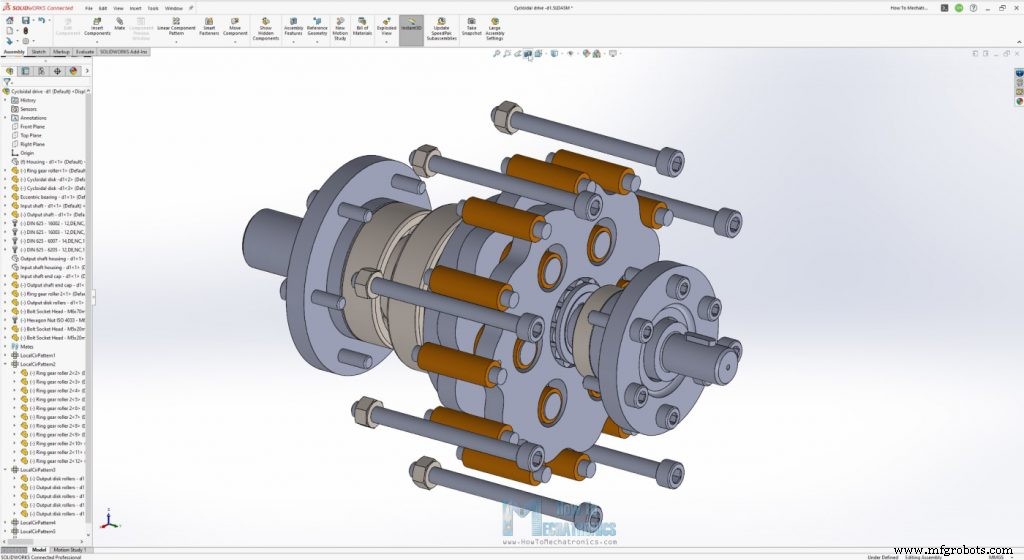
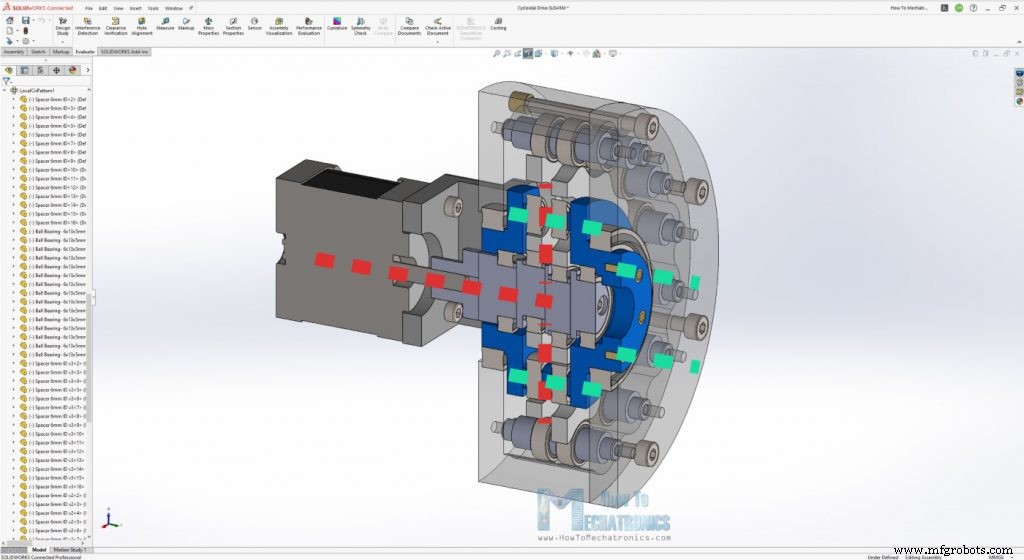
다음은 SOLIDWORKS를 사용하여 설계하고 롤러에 볼 베어링을 사용하는 사이클로이드 드라이브입니다.
이 시점에서 이 프로젝트를 후원한 SOLIDWORKS에 감사 인사를 전하겠습니다. 3DEXPERIENCE World에 대해 들어보셨나요? SOLIDWORKS에서 주최하는 연례 행사?
3DEXPERIENCE World 2022는 디자이너, 엔지니어, 기업가 및 제작자로 구성된 활기찬 커뮤니티를 한자리에 모아 최신 기술 및 모범 사례에 대해 배우고 서로 만나고 지식을 공유합니다.
SOLIDWORKS.COM/3DXW22_HOWTOMECH에서 오늘 등록해야 합니다. , 그리고 거의 무료로 참석하십시오.
그럼에도 불구하고, 이 3D 모델을 STEP 파일로 찾아 다운로드할 수 있을 뿐만 아니라 Thangs의 브라우저에서 탐색할 수 있습니다.
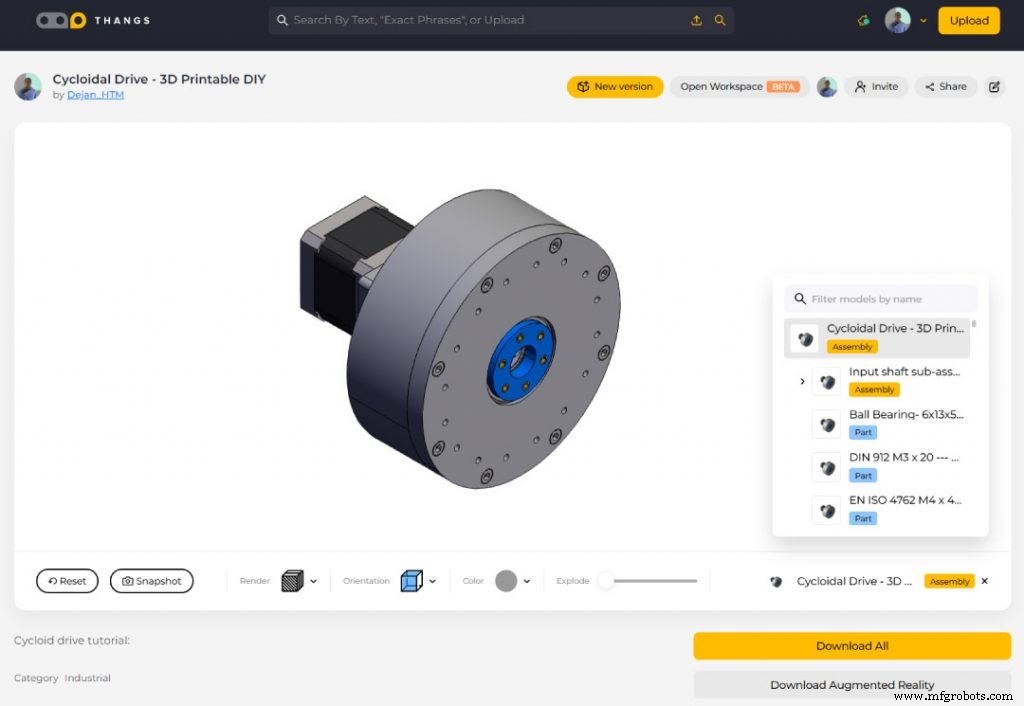
Thangs에서 3D 모델 .STEP 파일을 다운로드할 수 있습니다.
이 튜토리얼을 지원해 주셔서 감사합니다.
부품 3D 인쇄에 사용되는 STL 파일은 여기에서 다운로드할 수 있습니다.
<그림 클래스="wp-block-media-text__media">
관련 프로젝트
스트레인 웨이브 기어(Harmonic Drive)란 무엇입니까? 로봇 공학 애플리케이션을 위한 완벽한 기어 세트!?
내가 정의한 첫 번째 것은 이 기어박스에 대해 15:1의 감속비를 원한다는 것이었습니다. 즉, 16개의 링 기어 롤러가 필요했습니다. 그래서 저는 SOLIDWORKS에서 원 주위에 16개의 롤러로 스케치를 그립니다.
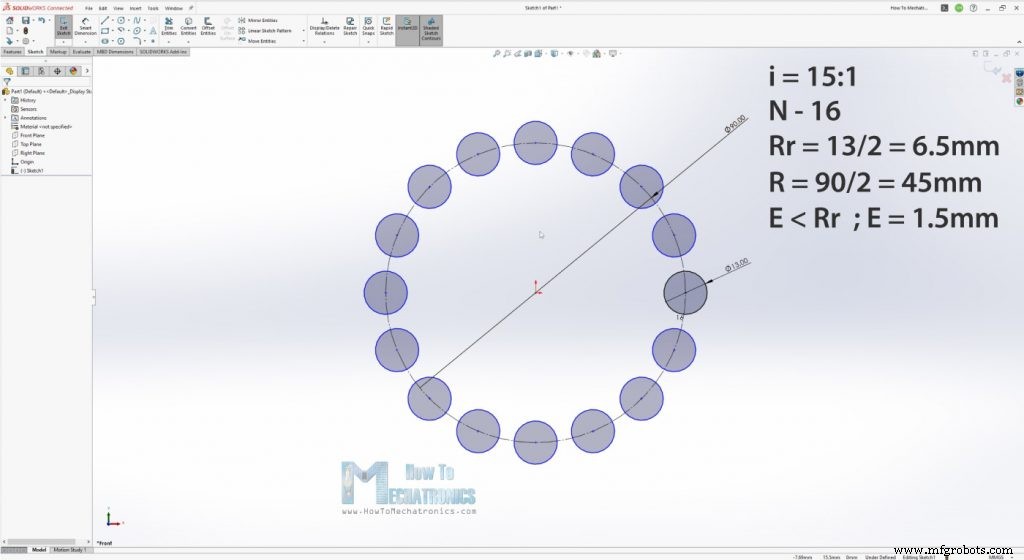
그런 다음 외경이 13mm인 롤러에 베어링을 사용하기로 했습니다. 이제 이 두 가지 매개변수에 따라 링 기어 피치 직경의 크기를 정의할 수 있었습니다. 저는 90mm로 설정했습니다. 편심 값은 롤러 직경의 절반보다 작아야 하며 1.5mm 값을 선택했습니다.
이제 4개의 주요 입력 매개변수가 있으므로 사이클로이드 디스크의 모양이나 프로파일을 그릴 수 있습니다. 앞서 언급했듯이 디스크 프로파일은 미끄러지지 않고 직선을 따라 구를 때 원 위의 한 점이 추적하는 곡선인 사이클로이드 또는 그 변형인 에피사이클로이드에서 유래합니다. .
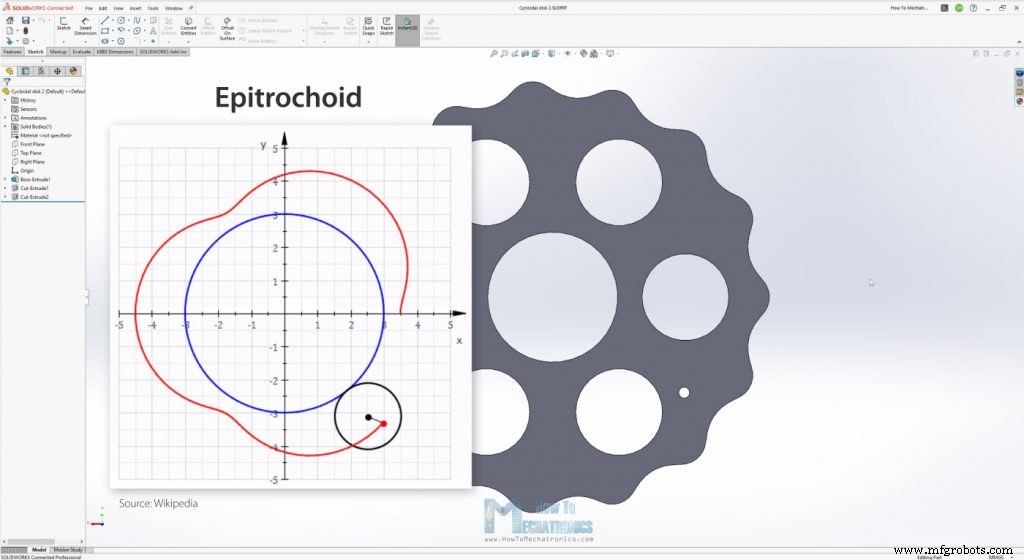
추적점이 외부 원의 중심에서 떨어져 있고 이것이 실제로 사이클로이드 디스크 프로파일의 기반이 되는 Epitrochoid라고 하는 또 다른 변형이 있습니다.
이러한 곡선을 그리기 위해 여기에서 이러한 매개변수 방정식을 사용할 수 있지만 롤러의 직경 및 편심률과 같은 다른 매개변수도 포함할 수 있습니다. 이것은 상황을 약간 복잡하게 만들지만 운 좋게도 Omar Younis가 SOLIDWORKS Education 블로그에 작성한 훌륭한 문서가 있었는데 그는 이러한 모든 매개변수를 단일 X 및 Y 매개변수 방정식으로 결합했습니다.
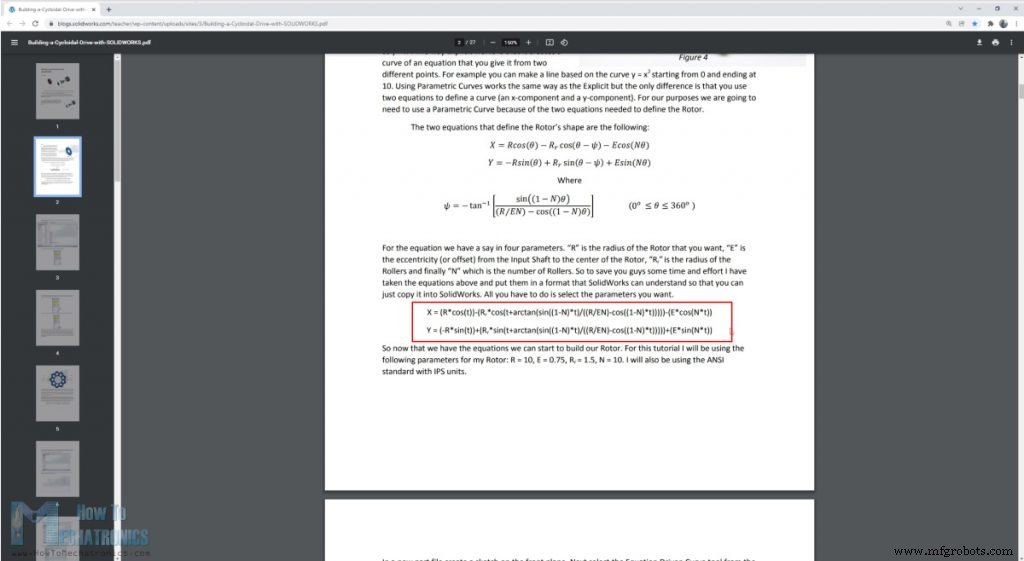
방정식은 다음과 같습니다.
N - Number of rollers
Rr - Radius of the roller
R - Radius of the rollers PCD (Pitch Circle Diamater)
E - Eccentricity - offset from input shaft to a cycloidal disk
x = (R*cos(t))-(Rr*cos(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))-(E*cos(N*t))
y = (-R*sin(t))+(Rr*sin(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))+(E*sin(N*t))
===================
Values for this DIY Cycloidal Drive:
N = 16
Rr = 6.5
R = 45
E = 1.5
x = (45*cos(t))-(6.5*cos(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))-(1.5*cos(16*t))
y = (-45*sin(t))+(6.5*sin(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))+(1.5*sin(16*t))
Code language: Arduino (arduino)이제 프로파일을 생성하기 위해 SOLIDWORKS의 Equations Driven Curve 도구를 사용하고 두 방정식을 적절하게 삽입하면 사이클로이드 디스크 프로파일이 생성됩니다. 물론 입력 매개변수의 경우 값을 삽입해야 합니다.
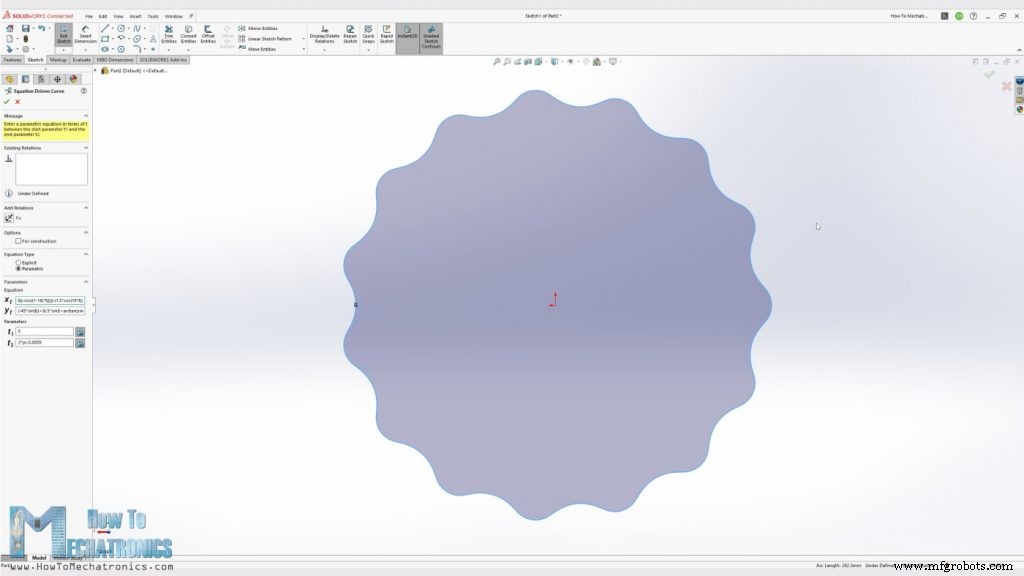
또한 "t" 매개변수가 0에서 2*pi 또는 360도인 경우 곡선이 생성되지 않습니다. 따라서 t2 매개변수를 2*pi보다 약간 짧게 설정한 다음 간단한 스플라인을 사용하여 연결할 수 있는 작은 간격으로 곡선을 생성해야 합니다.
이제 사이클로이드 드라이브의 주요 매개변수를 정의했으며 나머지는 모든 것이 연결되는 방법에 대한 기술 솔루션을 찾는 것뿐입니다. 이번에도 그렇게 강한 3D 프린팅 재료를 사용하지 않는다는 점을 고려하여 롤러의 샤프트는 물론 입력 샤프트와 출력 샤프트가 양쪽으로 지지되도록 설계했습니다.
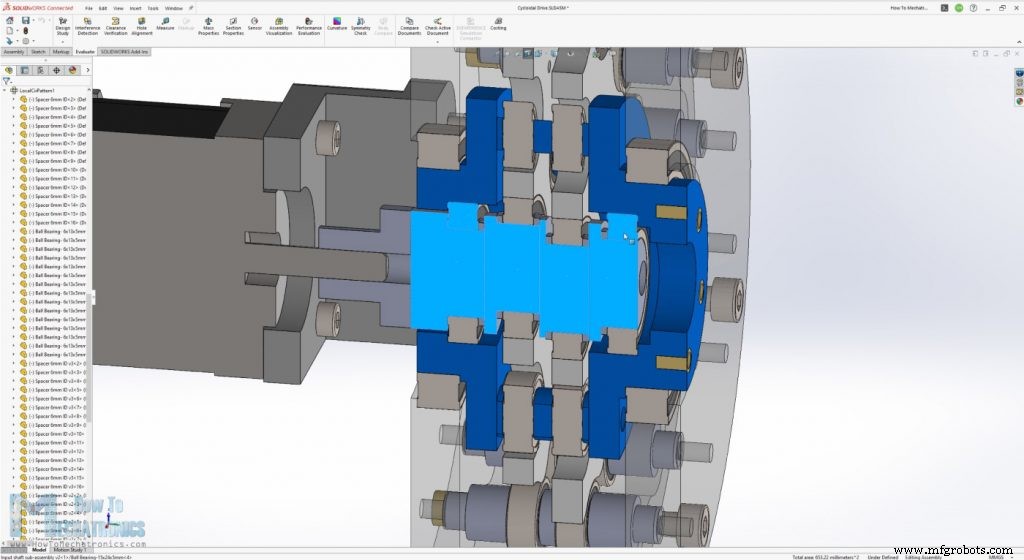
입력 샤프트는 여러 섹션으로 구성되며 출력 샤프트 내에서 두 개의 베어링으로 지지됩니다. 출력 샤프트도 하우징 내에서 2개의 베어링으로 지지됩니다.
따라서 이 기어박스의 작업을 요약하면 모터의 입력이 기어 링 주위의 사이클로이드 디스크를 구동하는 편심 입력 샤프트로 전달됩니다.
출력 샤프트 롤러를 통해 출력 샤프트로 전달되는 생성된 역동작. 이제 끝났습니다. 이제 3D 인쇄하여 실제 생활에서 어떻게 작동하는지 보겠습니다.
부품을 3D 프린팅할 때 슬라이싱 소프트웨어에서 홀 수평 확장 기능을 사용하는 것이 중요합니다.

일반적으로 3D 인쇄된 부품의 구멍은 원래 크기보다 작기 때문에 이 기능을 사용하여 구성하고 이 부품에 매우 중요한 정확한 치수를 얻을 수 있습니다. 내 것을 0.07mm로 설정하고 부품의 외부 치수를 보정하는 수평 확장 캔도 0.02mm로 설정했습니다. 물론 3D 프린터에서 어떤 값이 최상의 결과를 얻을 수 있는지 확인하려면 몇 가지 테스트 인쇄를 수행해야 합니다.
여기 3D 프린팅된 모든 부품과 사이클로이드 드라이브를 조립하는 데 필요한 베어링과 볼트가 있습니다.

다음은 이 사이클로이드 드라이브를 조립하는 데 필요한 모든 구성 요소의 목록입니다.
링 기어 핀을 하우징에 삽입하는 것으로 시작했습니다. 이 핀은 링 기어 롤러 또는 베어링을 수용하지만 직경이 6mm에 불과합니다. 사이클로이드 디스크의 하중을 받아도 부서지지 않을 만큼 튼튼한지 확신이 없었습니다.

그래서 나는 그것들을 속이 빈 상태로 만들고 주위에 있던 3mm 금속 샤프트를 삽입했습니다. 이렇게 하면 핀이 충분히 강해질 것입니다. 물론 이를 위한 더 스마트한 솔루션이 있습니다. 예를 들어 M6 볼트를 대신 사용할 수 있지만 M6 볼트가 6mm보다 약간 작아서 베어링이 흔들리는 것이 마음에 들지 않습니다. 이상적으로는 35mm의 특정 크기로도 실제로 쉽게 구입할 수 있는 적절한 6mm 막대를 사용할 수 있습니다.
모든 핀을 제자리에 배치하면 베어링을 7mm 거리 링, 베어링, 3mm 거리 링, 베어링 및 다른 7mm 거리 링의 순서로 삽입할 수 있습니다.

이제 사이클로이드 드라이브가 우리가 만든 이 링 기어에 맞아야 하고 편심 운동으로 디스크를 회전시키려고 하면 회전하면서 옆으로 밀어 디스크가 반대로 회전하기 시작해야 합니다.
다음으로 4개의 섹션으로 구성된 입력 샤프트를 조립할 수 있습니다. 각 섹션에서 베어링과 약간의 거리 링을 배치해야 하며, 편심 때문에 샤프트가 섹션으로 만들어지지 않는 한 그렇게 할 수 없습니다.

섹션을 함께 연결하기 위해 모든 섹션을 관통하는 두 개의 M3 볼트를 사용하고 있습니다. 여기서 우리는 이 M3 볼트의 구멍이 M3 볼트보다 약간 작아서 볼트가 나사산을 만들고 더 단단하게 고정된다는 점을 알 수 있습니다.
샤프트를 조립했을 때의 모습은 이렇습니다만, 실제로는 사이클로이드 디스크를 끼워야 했고 지금은 할 수 없었습니다. 그래서 디스크도 같이 넣고 분해해서 다시 조립했습니다.

출력축 조립을 계속했습니다. 여기에서 출력 롤러 또는 베어링을 설치해야 하며 링 기어 롤러에 대해 표시된 것과 유사한 방식으로 수행합니다. 13mm 베어링과 20mm 길이의 M3 볼트를 통해 삽입된 거리 링이 있는 6mm 핀.

사이클로이드 디스크의 구멍을 통해 이러한 출력 롤러를 삽입할 때 두 디스크를 서로 180도 위상이 다른 위치에 배치하는 것이 중요합니다. 이를 돕기 위해 두 디스크에 위상이 180도 다른 작은 구멍을 만들었습니다. 그래서 여기에서 그것들을 일치시키기만 하면 됩니다. 그러면 롤러를 통과시킬 수 있습니다.

약간 타이트한 핏이기는 하지만 구멍 치수가 정확하다면 맞춰드릴 수 있습니다.

이제 이 핀을 다른 쪽의 다른 플랜지에 고정할 수 있지만 이를 위해 먼저 플랜지에 나사산 인서트를 설치해야 합니다. 전체 어셈블리를 더 작게 만들기 위해 이 나사산 인서트를 사용하고 있습니다.

따라서 입력과 출력 샤프트가 함께 조립되면 외경이 47mm인 베어링을 통해 이 전체 어셈블리를 하우징에 설치할 수 있습니다.

그런 다음 샤프트 전면에 이와 같은 베어링을 하나 더 설치하고 하우징 덮개를 제자리에 삽입할 수 있습니다. 또한 16개의 핀이 모두 하우징 덮개 슬롯에 맞아야 하기 때문에 꼭 맞게 끼워야 하므로 약간의 힘을 가하여 삽입해야 합니다.

하우징 뒷면에 M4 나사산 인서트를 설치한 다음 덮개와 하우징을 40mm M4 볼트로 고정했습니다.

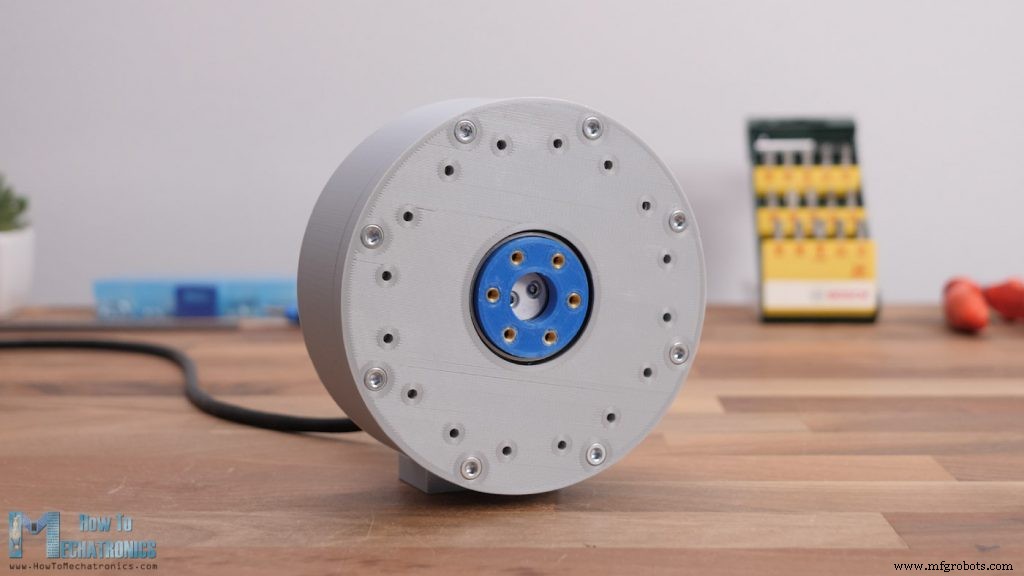
그리고 그게 다야! 말이 맞다면 이 아름다움을 한 번 보세요. 저는 이 사이클로이드 기어박스가 튀어나온 것 없이 깔끔한 디자인으로 나온 방식이 정말 마음에 듭니다.

그럼에도 불구하고 이제 모터를 부착하고 어떻게 작동하는지 봅시다. 다양한 샤프트 커플러를 쉽게 부착할 수 있도록 인풋 샤프트 후면에 나사산 인서트를 몇 개 더 설치했습니다.

기어박스를 테스트하기 위해 NEMA 17 스테퍼 모터를 사용하여 적절한 3D 인쇄 샤프트 커플러를 입력 샤프트에 부착했습니다. 스테퍼를 3D 인쇄된 장착 브래킷에 고정하고 모터 샤프트를 커플러에 삽입하고 장착 브래킷을 하우징에 고정했습니다.

마지막으로 출력 샤프트 전면에 나사산 인서트를 설치하여 무언가를 부착할 수 있도록 하는 것입니다. 다음은 NEMA 17 스테퍼 모터와 결합된 이 사이클로이드 드라이브의 최종 모습입니다. 물론 여기서 다른 유형의 모터도 사용할 수 있습니다.
그리고 거기에 있습니다. 솔직히 말해서 이 변속기의 출력이 얼마나 매끄럽게 나왔는지 정말 놀랐습니다. 정면에서 우리는 15:1의 속도 차이로 반대 방향으로 동시에 회전하는 입력 및 출력 샤프트를 볼 수 있습니다.
또한 앞 덮개 없이 기어박스를 실행할 수 있어 앞에서 설명한 모든 것이 작동하는 것을 볼 수 있습니다.

모션은 단순히 매혹적입니다.
마지막으로 변속기 성능을 확인하기 위해 몇 가지 테스트를 해봤습니다. 여기서 주목해야 할 또 하나의 사실은 이 사이클로이드 드라이브가 일부 응용 프로그램에 좋은 기능이 될 수 있는 후진 구동도 가능하다는 것입니다.
그래서 여기에서는 이 기어박스가 10cm의 거리에서 생성할 수 있는 힘을 측정하고 있습니다. 토크로 변환된 약 26N의 판독값은 약 260Ncm이고, 길이가 34mm에 불과한 이 NEMA 17 스테퍼의 정격은 26Ncm입니다.
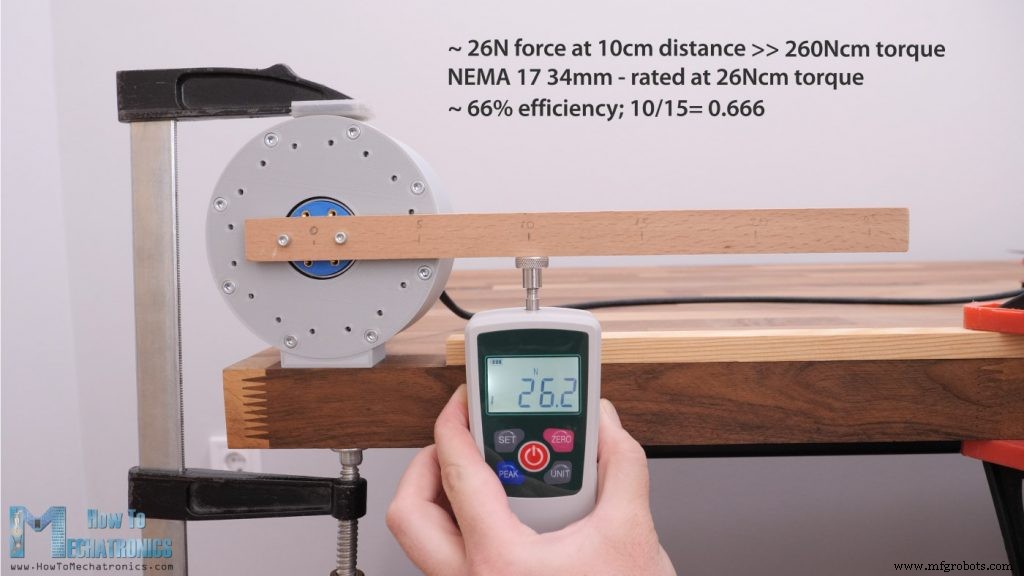
즉, 사이클로이드 드라이브로 토크가 약 10배 증가했습니다. 감속비가 15:1이고 이상적인 조건에서 토크가 15배 증가해야 한다는 점을 고려하면 약 66%의 효율입니다. 그럼에도 불구하고 모든 것이 저예산 3D 프린터로 3D 인쇄되고 부품이 일부 전문 프린터나 CNC 기계(전체 금속 기어박스의 경우)로 얻을 수 있는 정확도가 아니라는 점을 고려하면 이는 여전히 훌륭한 결과입니다.
정확도 테스트도 해봤는데 좋은 결과를 보여줬습니다.

로봇 프로젝트를 만들 때 향후 비디오에서 이러한 유형의 기어박스를 확실히 사용할 것입니다.
이 비디오를 보시고 새로운 것을 배웠기를 바랍니다. 질문이 있는 경우 아래의 댓글 섹션에 자유롭게 질문하세요.
산업기술
이 기사에서는 흐름이 무엇인지와 3D 프린팅에서 흐름이 갖는 중요성에 대해 언급할 것입니다. 또한 3D 프린터가 최상의 결과를 제공하도록 이 매개변수를 보정하는 방법을 설명합니다. 3D 프린터의 흐름 흐름은 모델을 만들기 위해 선택한 인쇄 매개변수를 기반으로 압출기를 통과하는 필라멘트의 양(더 정확하게는 부피)입니다. 흐름의 계산은 필라멘트의 직경과 노즐의 출구 직경에 따라 3D 프린터 제조업체가 압출기 모터에 대해 설정한 단계/mm에 따라 3D 프린터에서 자동으로 수행됩니다. 압출기 교체 전 3D 프린터 보정 방법 예를 들어
이 글은 3D 프린팅의 후퇴 개념을 명확히 하려고 합니다. 모델의 외부 표면에 재료 증착이나 동시에 인쇄되는 조각 사이의 스레드 없이 고품질 인쇄를 달성하는 데 매우 중요한 매개변수이기 때문입니다. 수축은 재료의 떨어지는 것을 방지하기 위해 필요한 필라멘트의 반동 운동입니다. 3D 프린팅 중에 진공 압출기가 수행하는 이동 및 변위 동안. 철회를 구성하는 매개변수는 다음과 같습니다. 후퇴 거리 : 후퇴 과정에서 후퇴하는 재료의 길이. 재료 유형, 압출 시스템 유형(직접 또는 보우덴) 및 핫엔드 유형에 따라 다릅니다. 유연한 소