

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 3 | |||
 |
| × | 4 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
| |||
 |
|
 |
|

안녕하세요 친구! 제 이름은 니콜라스이고 15살입니다. 오늘 이 튜토리얼에서는 Arduino Nano를 사용하여 스마트 풀업 바를 만드는 방법을 보여 드리겠습니다. 턱걸이 또는 턱걸이를 시작하면 음악 재생이 시작됩니다. 동기부여를 위해 일정기간 운동 후 보상 , 틱택 , 내 경우에는 분배됩니다! 위의 YouTube 동영상을 시청하세요. 스마트 풀업 바가 작동하는 모습을 보고 원하는 경우 그곳의 지침을 따르십시오!
원래는 운동을 더 하고 싶은 마음에 만들려고 했는데 사탕을 더 먹으려고 핑계를 대고 싶었습니다!
또한 이 프로젝트가 수상자 중 하나로 선정되었기 때문에 Arduino에 정말 감사드립니다. Arduino Day 커뮤니티 챌린지 2021 !
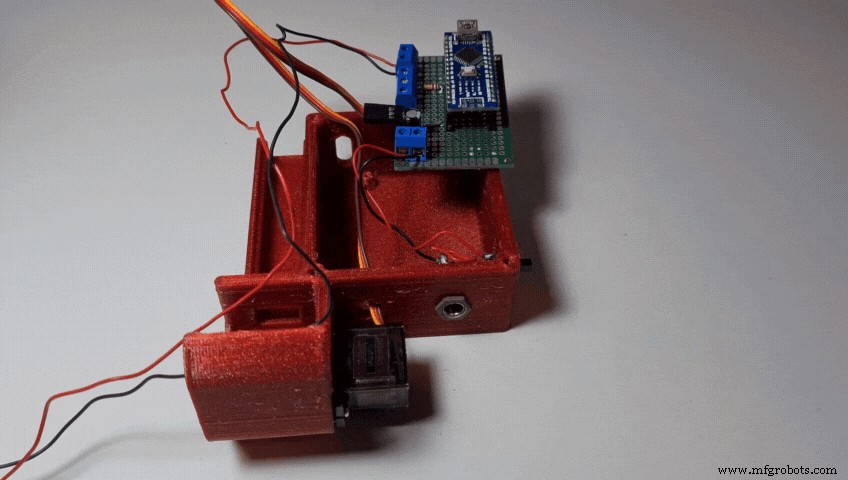
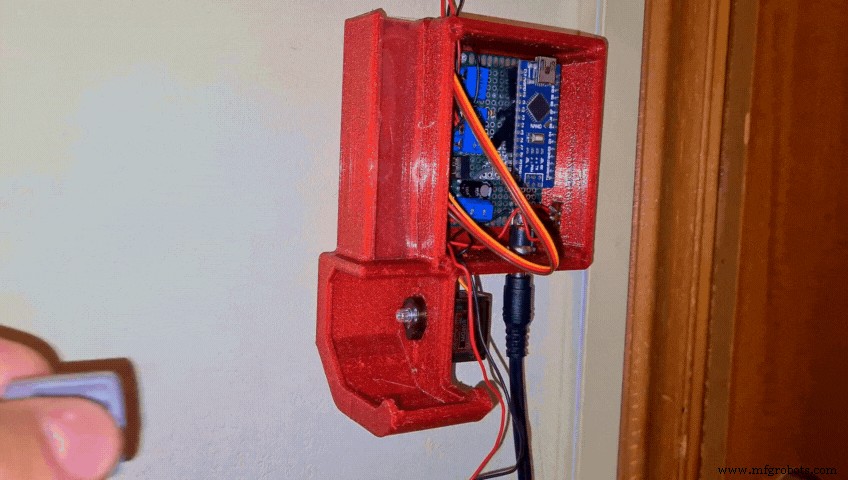
1단계:작동 방식 이해


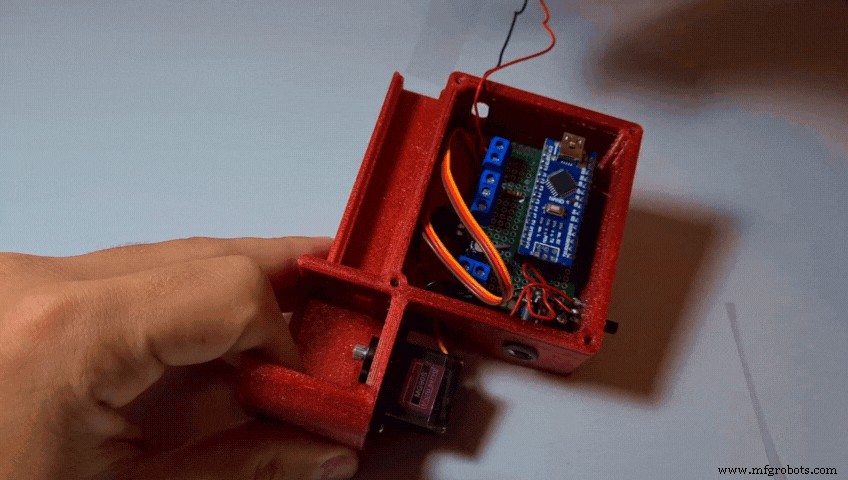
기본적으로 레이저 빔 센서를 만들었습니다. 저렴한 레이저 다이오드를 부착하여 및 LDR 풀업 바에서. 그것들은 완벽하게 정렬되어 많은 빛이 LDR에 도달하므로 센서가 높은 아날로그 값을 출력합니다. 그러나 운동을 시작하기 위해 막대에 손을 대고 광선을 차단하면 값이 크게 낮아지고 센서는 인클로저의 벽에 장착 된 Arduino Nano에 신호를 보내고 노래가 재생되기 시작합니다. 작은 스피커 사용(제 경우에는 Take on me 아하). 약 30초 후, 노래가 끝날 때 아직 내 손이 바에 있으면 보상, Tic Tac 서보에 의해 회전되는 3D 인쇄 메커니즘을 사용하여 분배됩니다!
이제 작동 방식을 알았으므로 만들기 시작 !
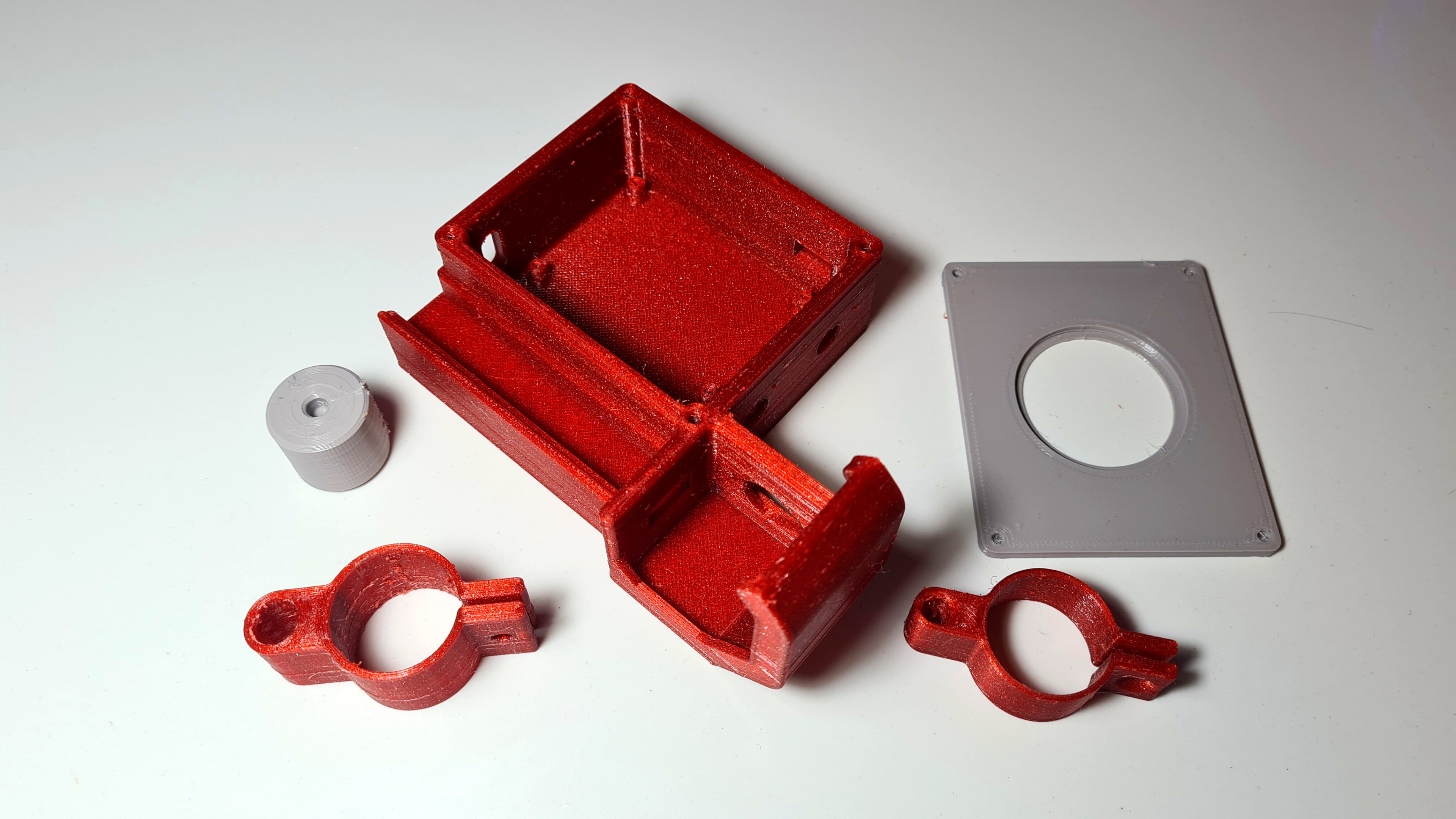
2단계:3D 프린팅
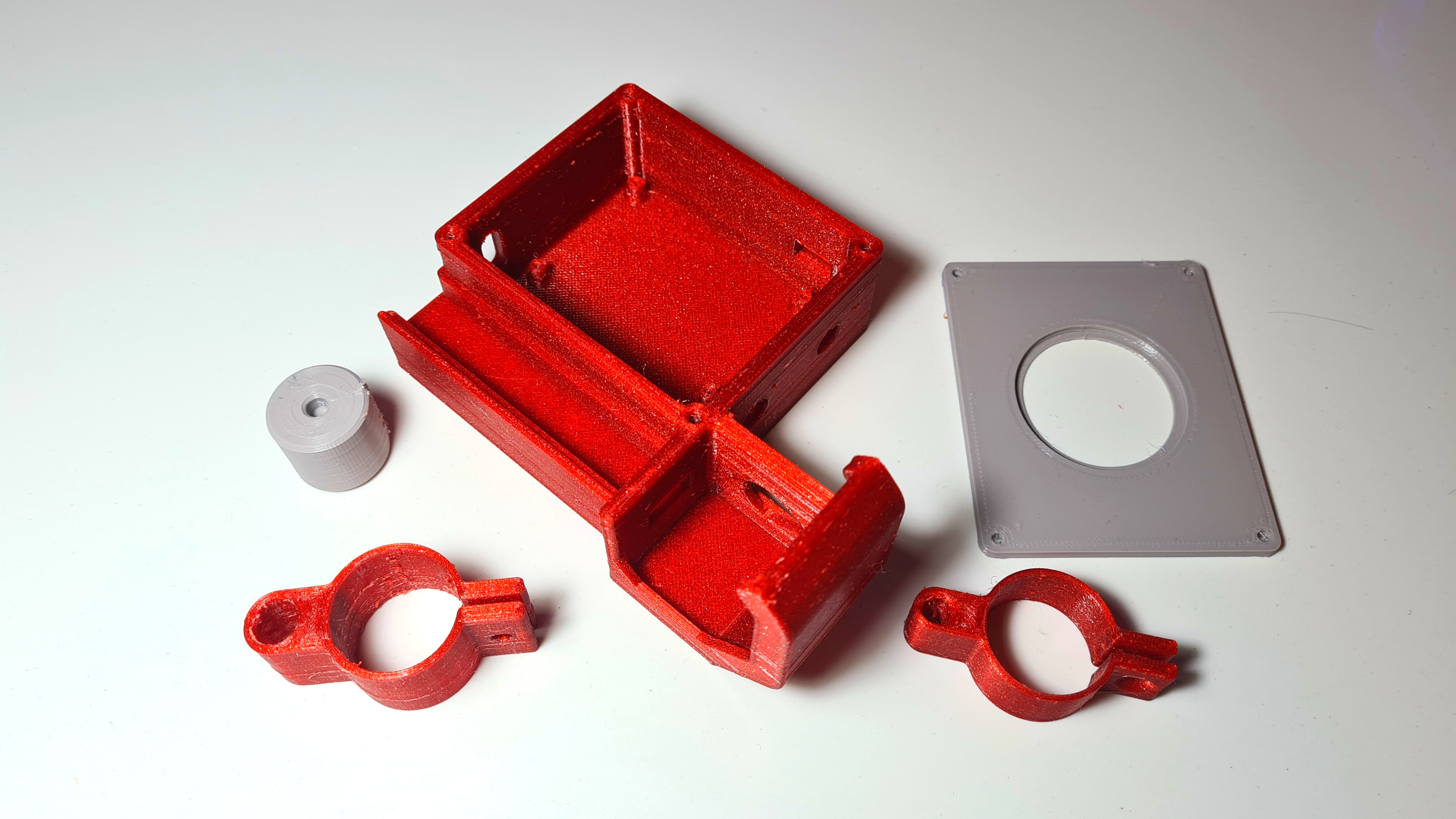
Fusion 360에서 모든 부품을 설계하고 Cura에서 슬라이스한 다음 0.2mm 레이어 높이에서 PETG의 Ender 3 V2로 인쇄했습니다. 다음을 인쇄해야 합니다.
<울>여기에서 모든 파일을 찾을 수 있습니다.
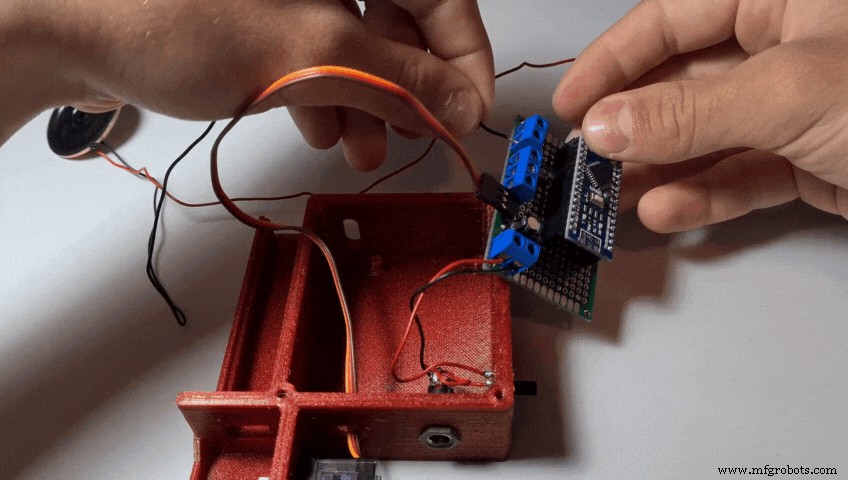
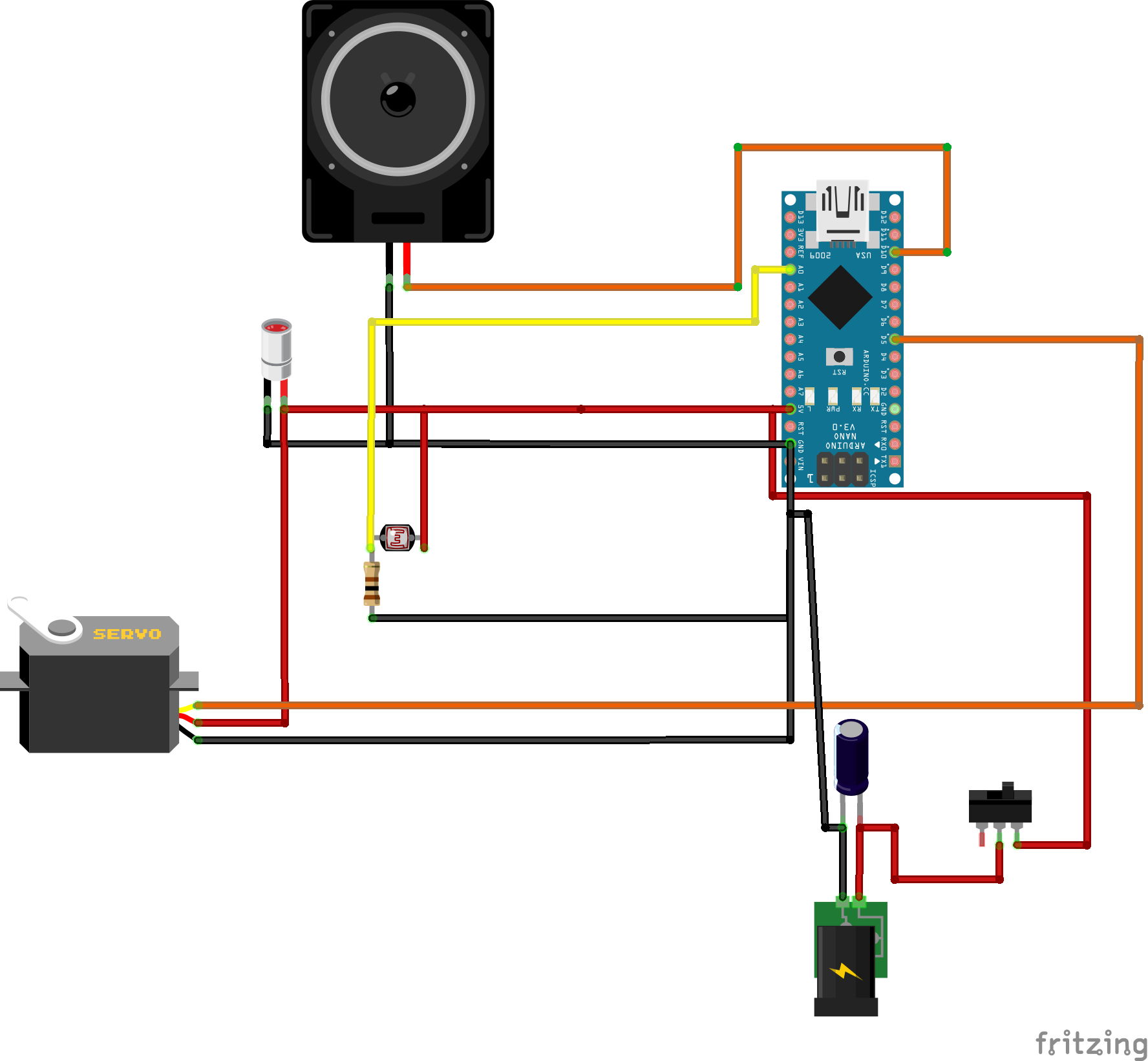
3단계:회로 파트 1
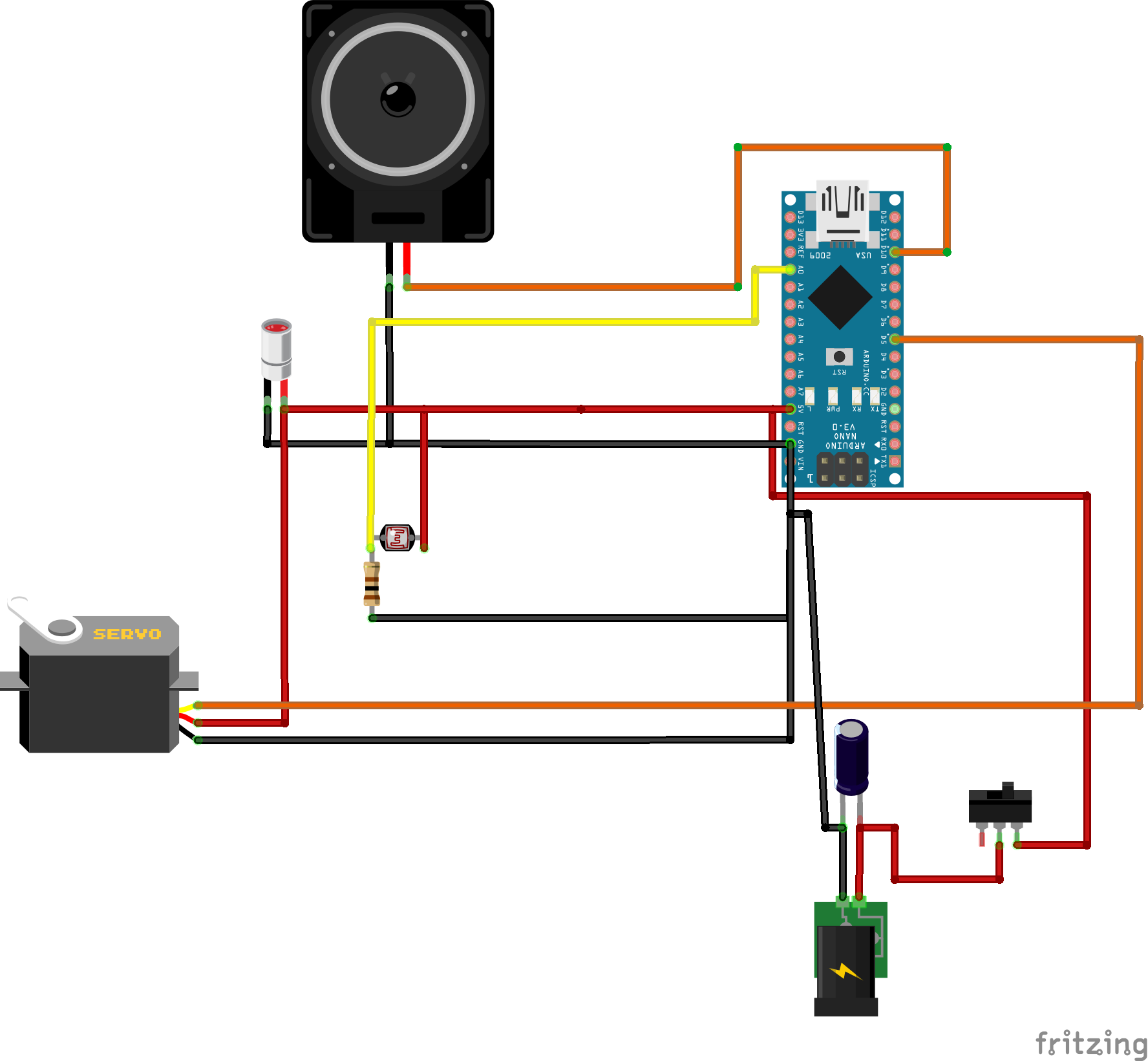
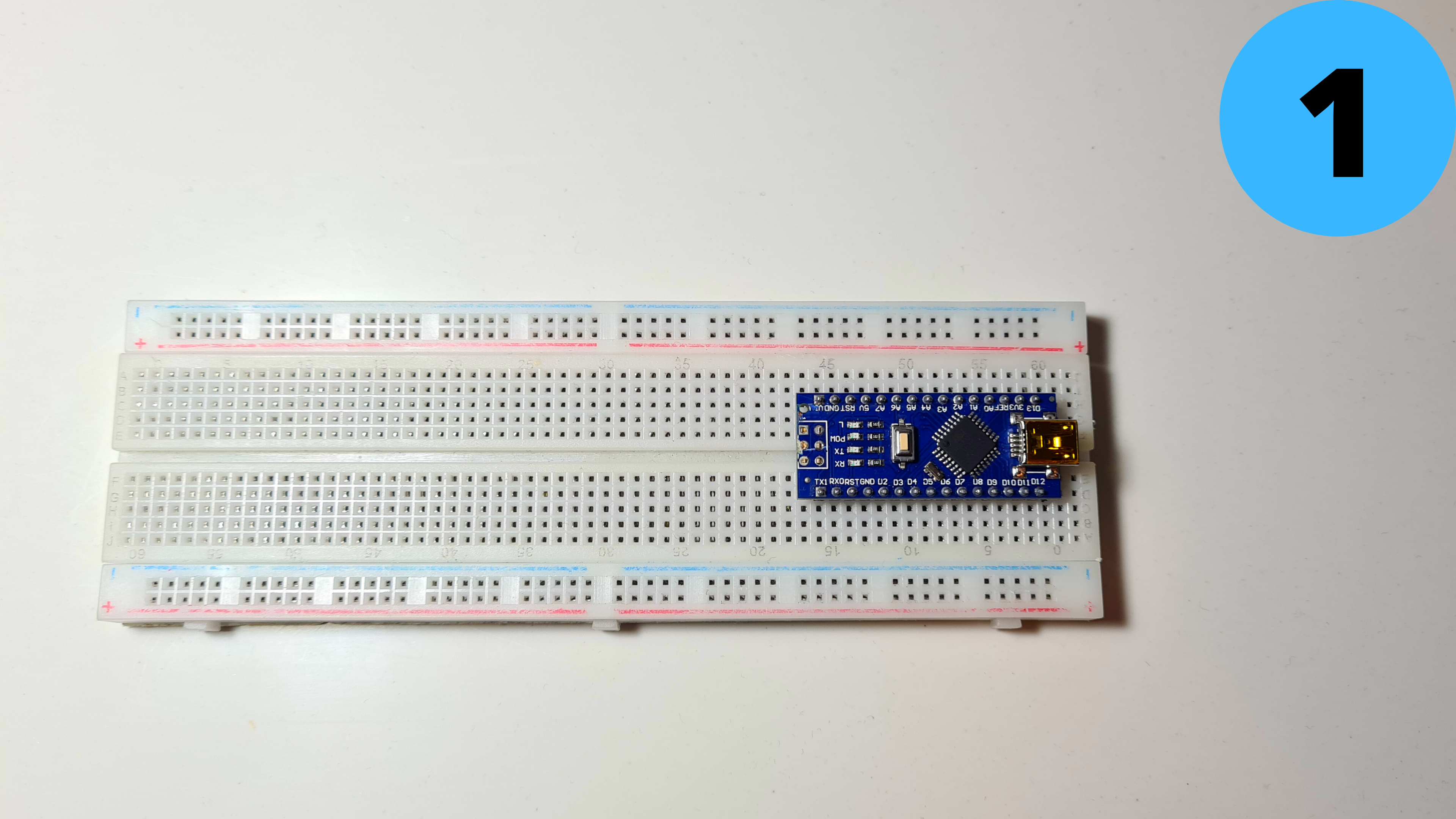
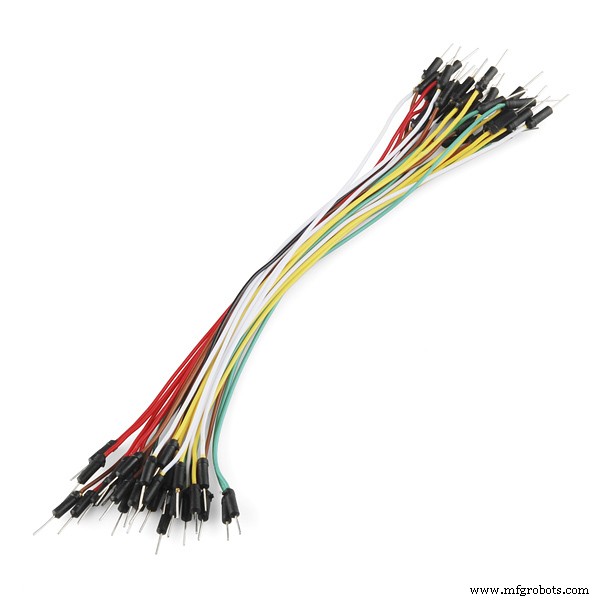
전자제품을 연결할 시간입니다!!
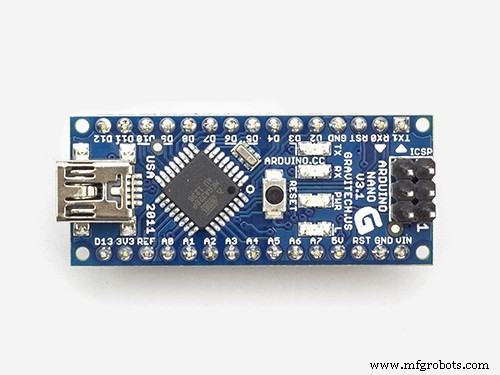
1. 아두이노 나노를 브레드보드에 올려놓기
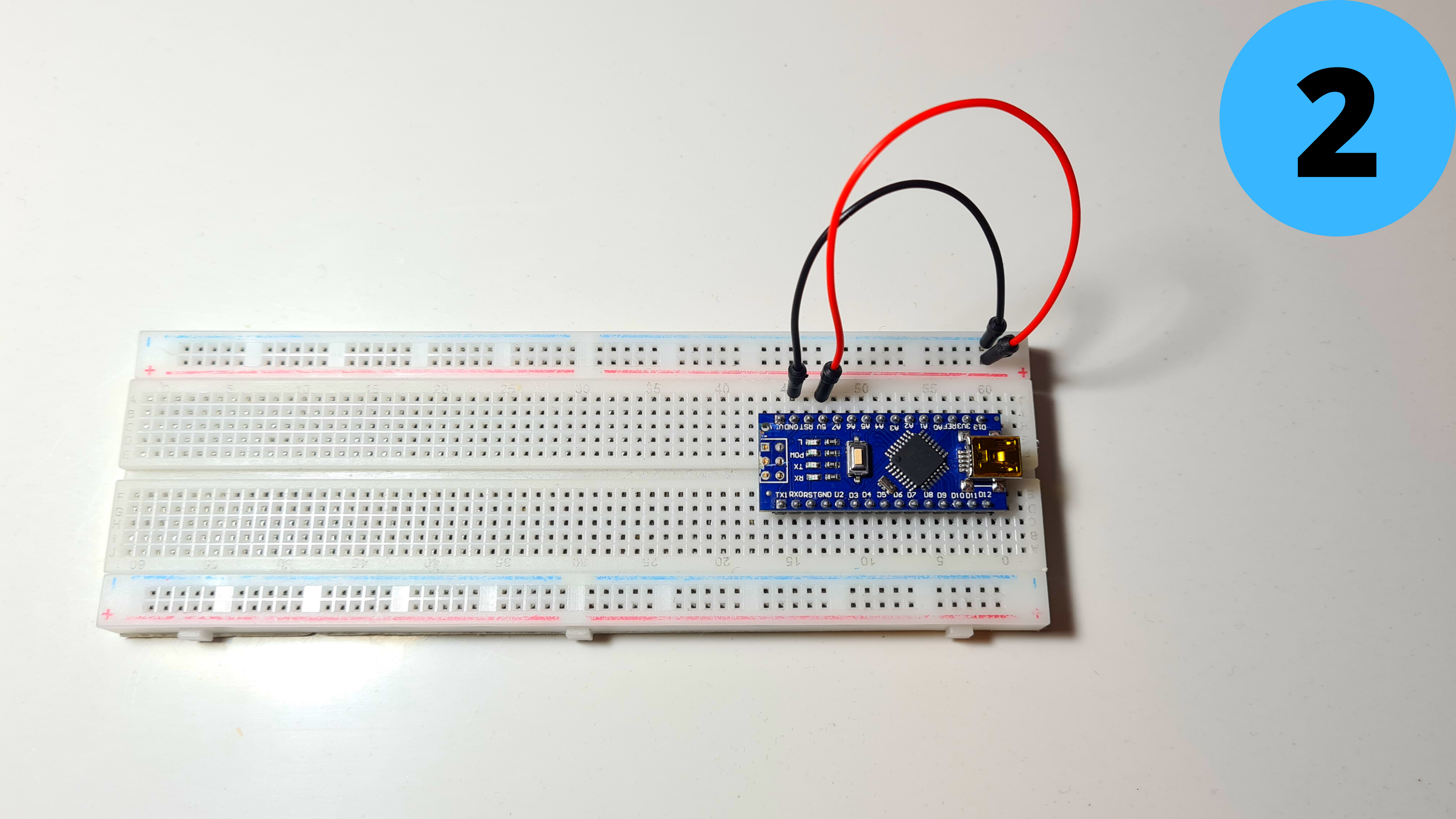
2. 5V 연결 양극 레일(빨간색) 및 GND로 네거티브 레일로 (파란색)
4단계:회로 파트 2
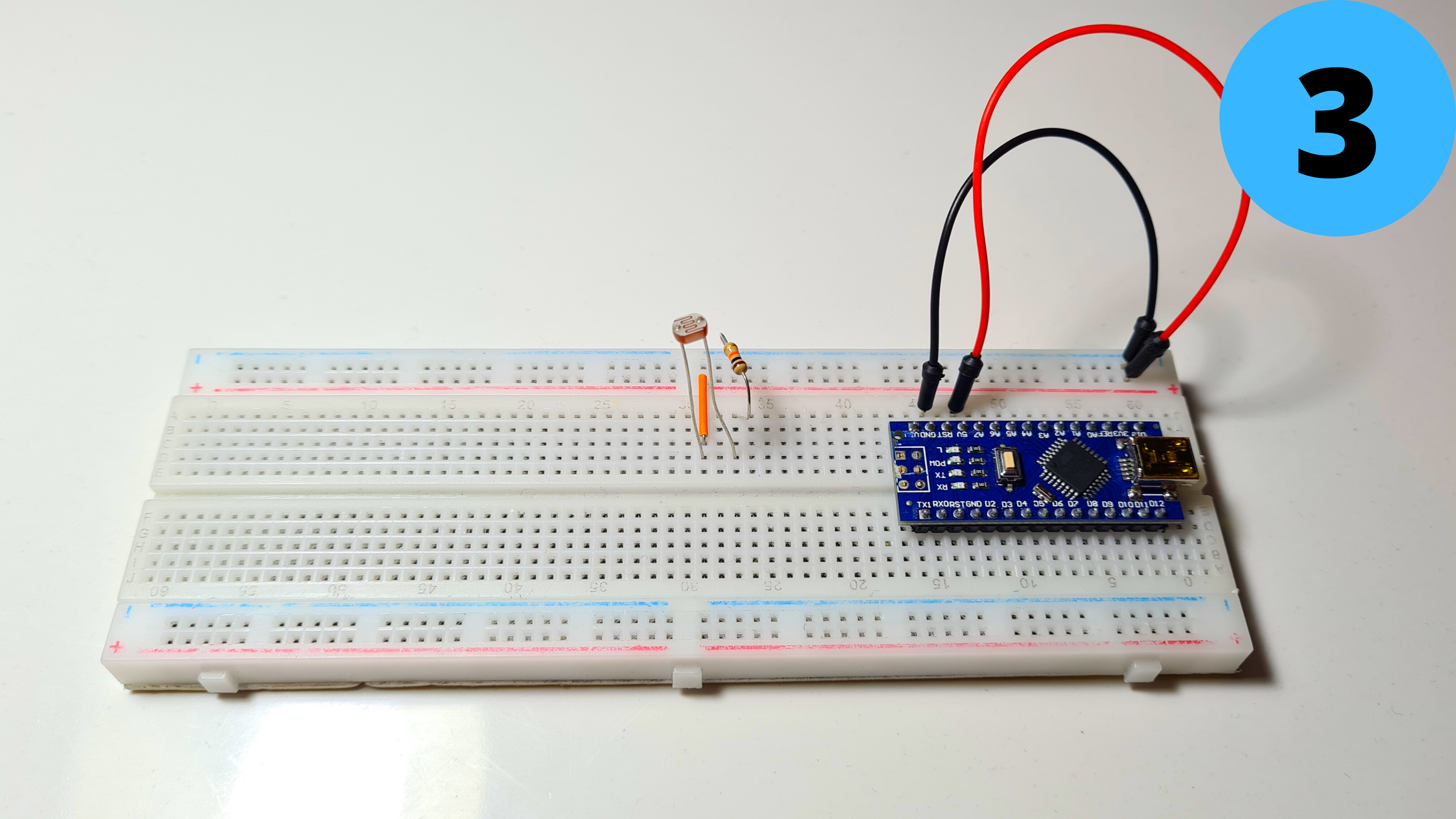
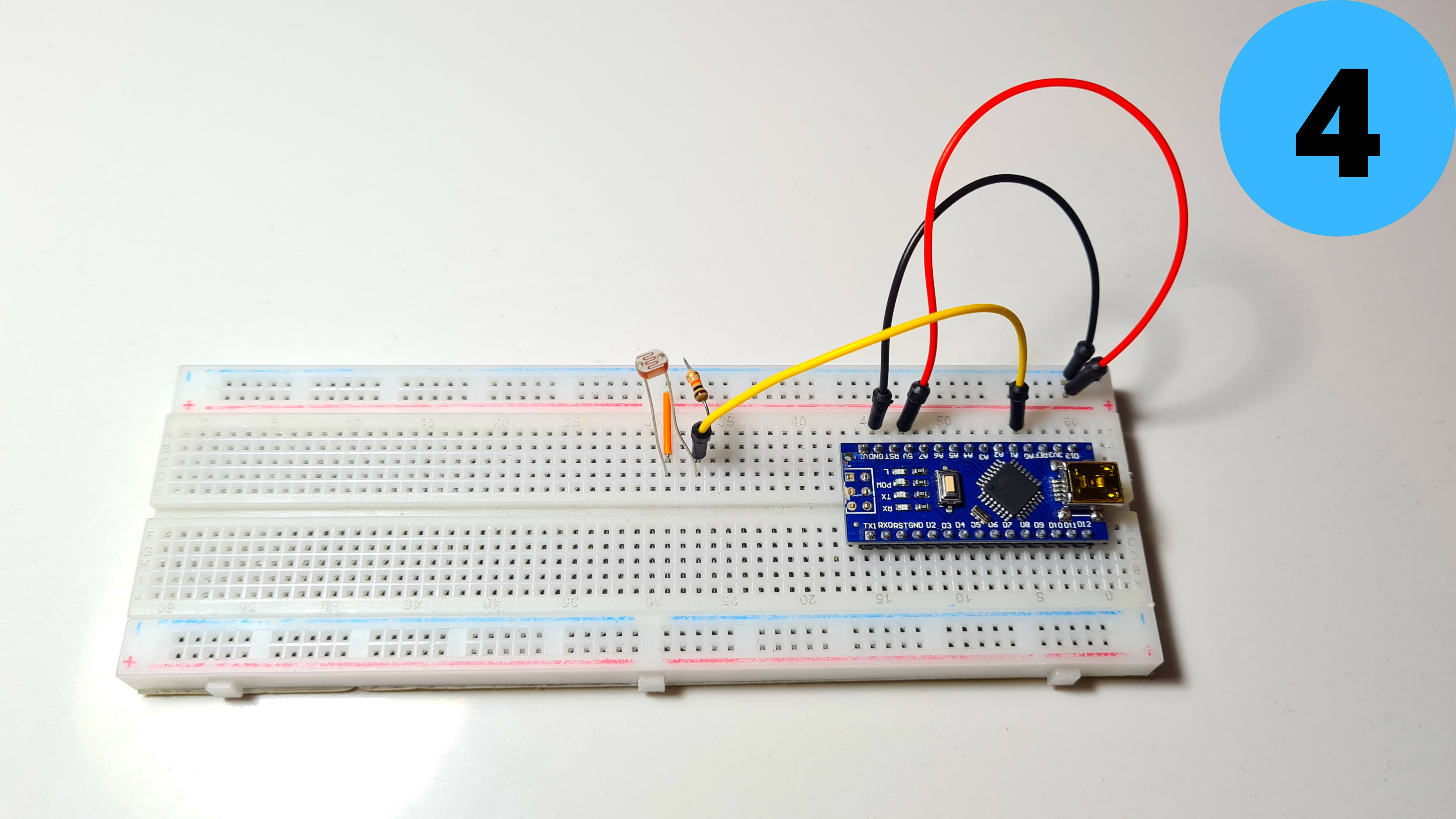
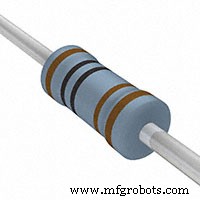
3. LDR 추가 리드 중 하나 연결 5V 로 그리고 다른 하나 GND로 1kΩ 저항 사용 (순서는 상관없음)
4. 두 번째 리드도 A0에 연결합니다.
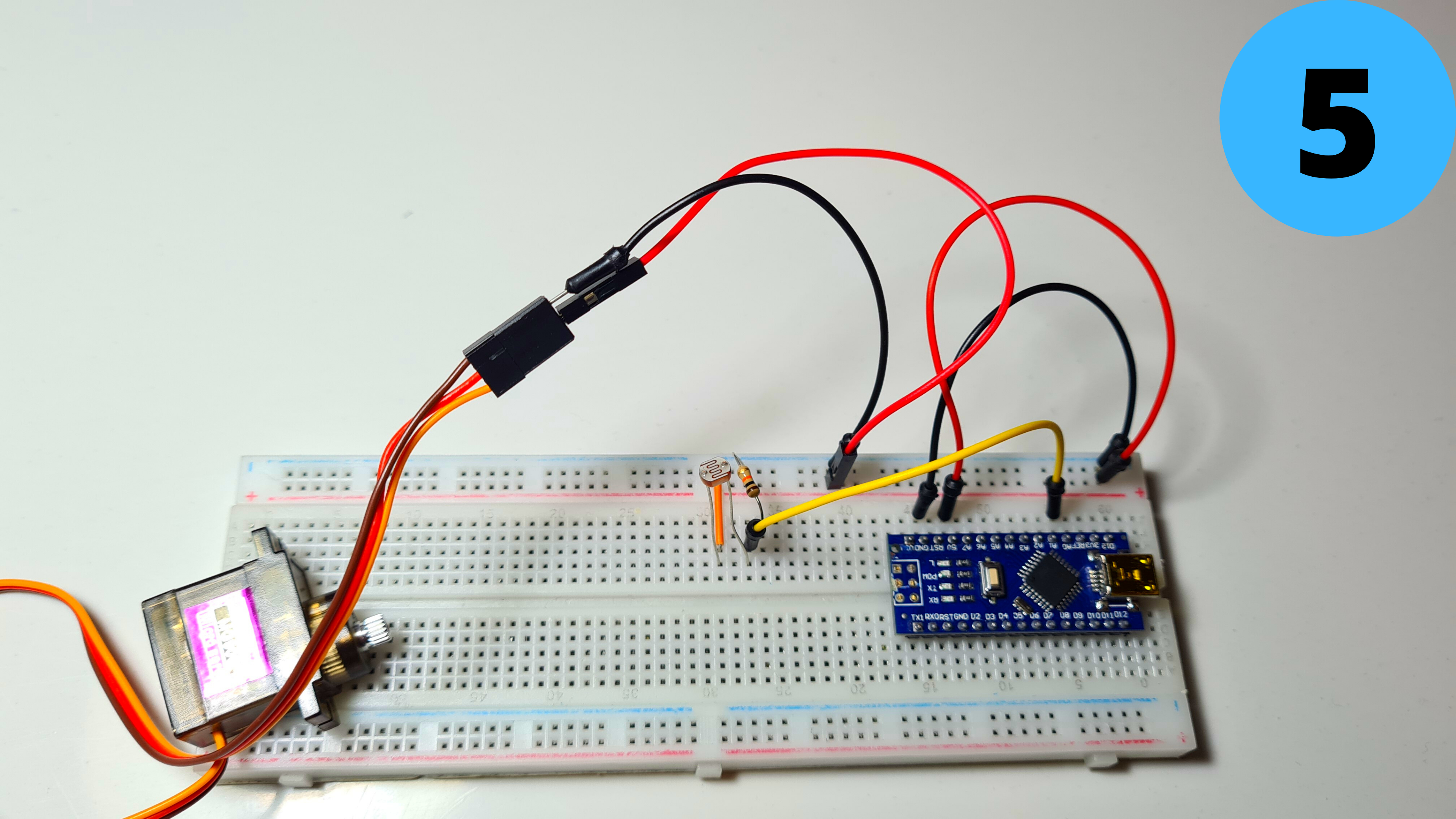
5. MG90S 서보를 추가하고 갈색 와이어를 GND에 연결하고 빨간색 와이어를 5V에 연결합니다.
5단계:회로 파트 3
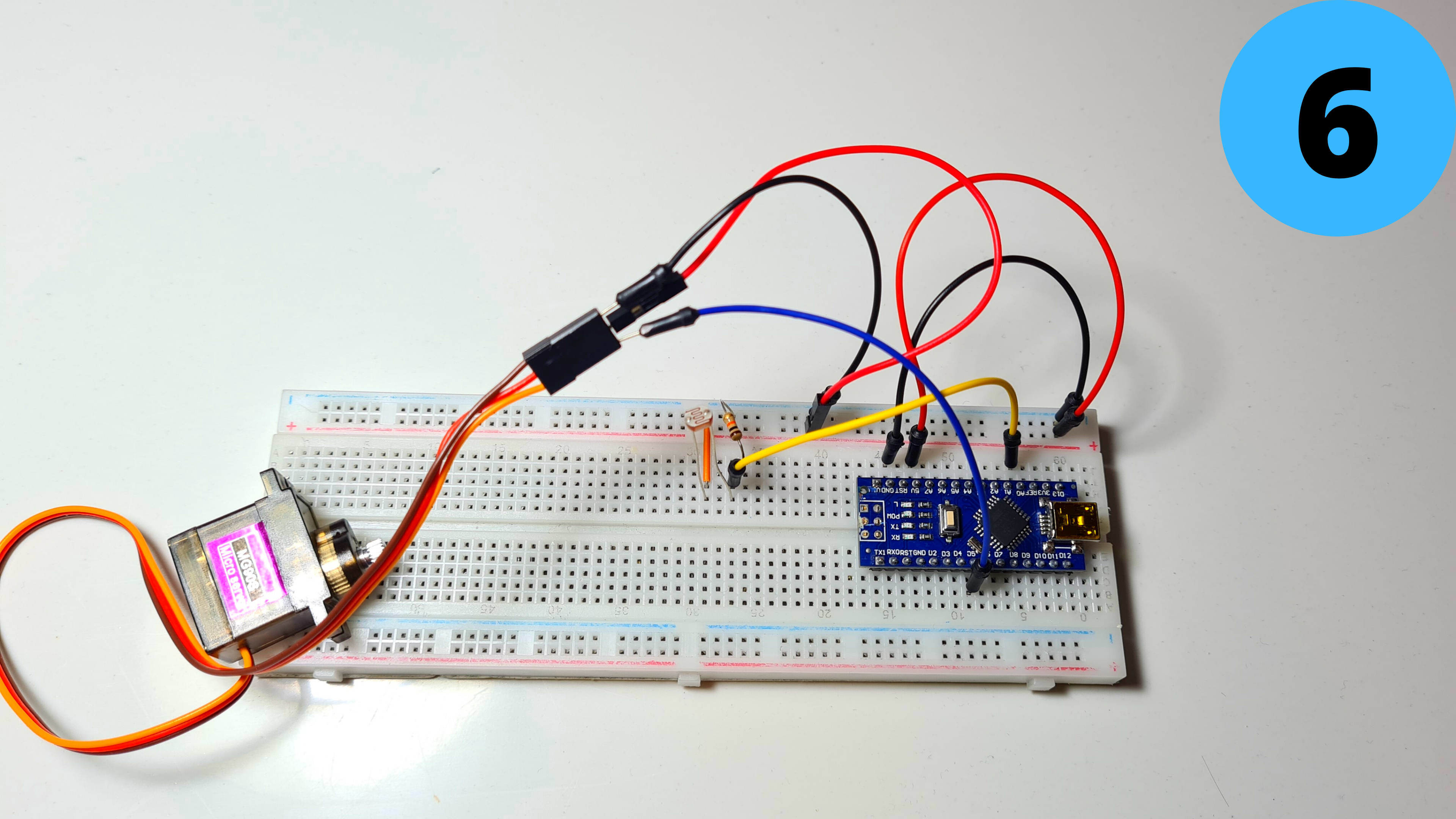
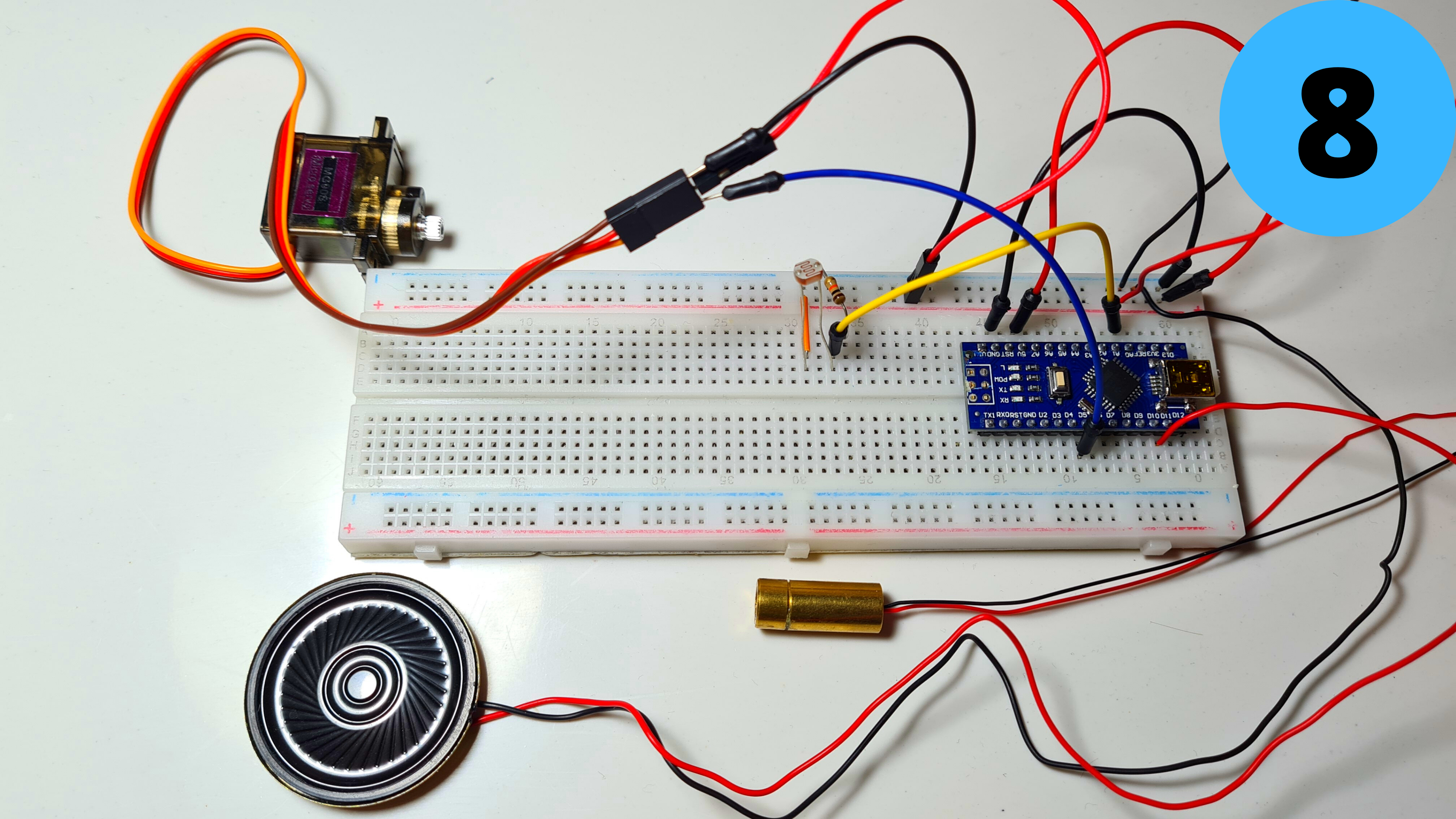
6. YellowWire 연결 D5까지
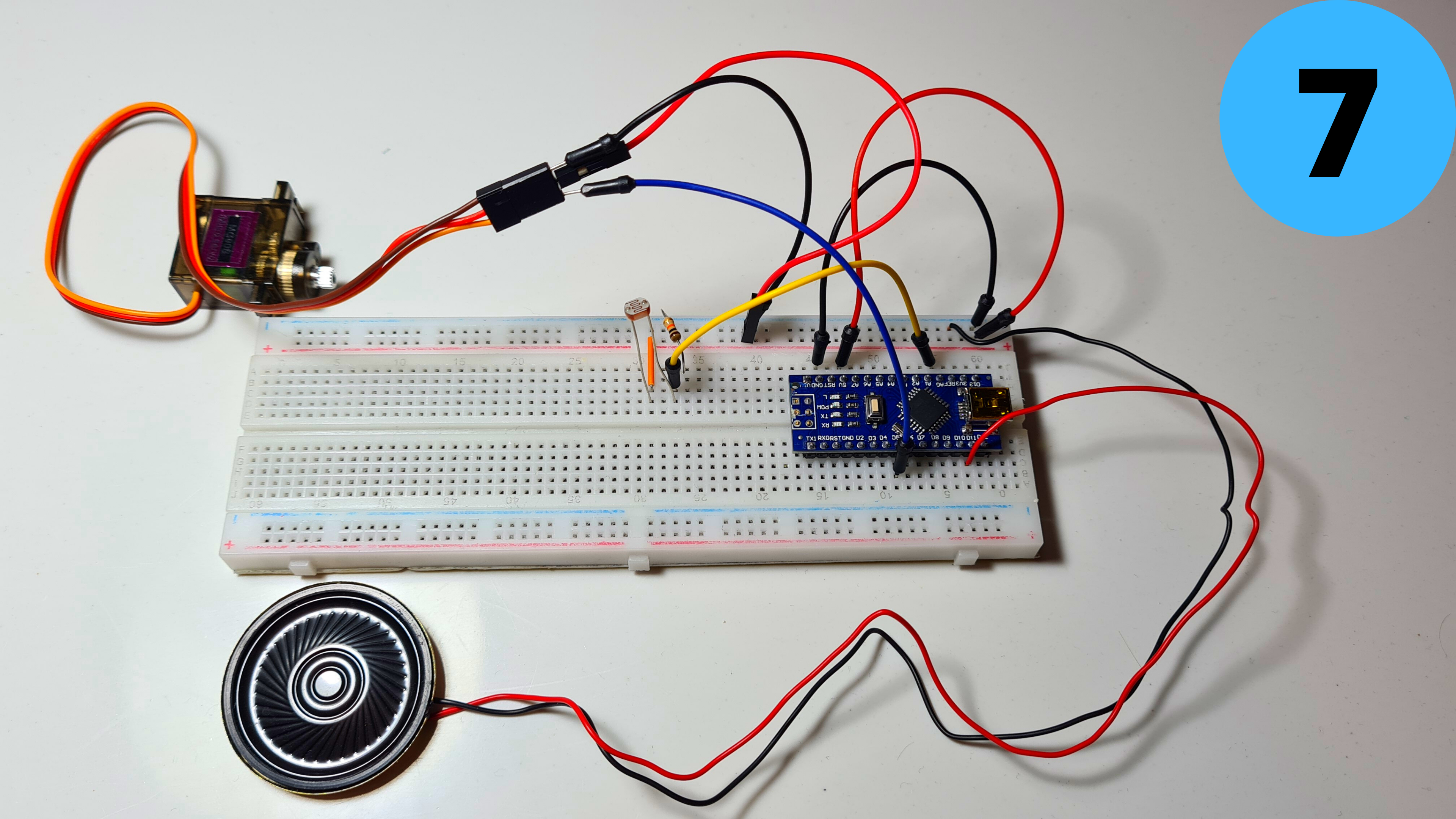
7. 작은 스피커 추가 Red Wire를 연결합니다. (+) ~ D11 블랙 와이어 (-)에서 GND로
8. 마지막으로 레이저 모듈 추가 빨간색 와이어(+)를 5V에 연결하고 검은색 와이어 (-)에서 GND로
6단계:프로그래밍
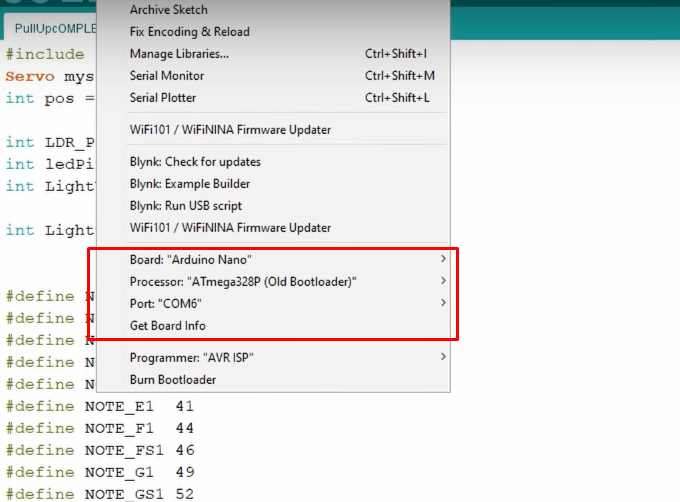
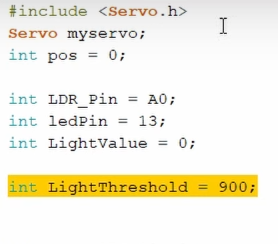
Arduino Nano를 프로그래밍할 시간입니다! 원하는 경우 다운로드할 수 있도록 아래에 내 코드를 첨부했습니다. Arduino IDE를 열고 Arduino Nano 보드를 선택합니다. , COM 포트 , 업로드를 클릭합니다. 그리고 당신은 끝났습니다! LightThreshold LDR이 빛에 얼마나 민감한지를 정의합니다. 다음 단계에서 더 자세히 다룰 때 이것을 염두에 두십시오.
adithyalokesh17의 작업도 함께 살펴보세요! 그는 많은 인기곡(예:"Take on me"를 사용함)을 복잡한 SD 카드 리더기 등 없이 버저와 스피커와 함께 사용하기 쉬운 가벼운 Arduino 코드로 변환했습니다.
7단계:테스트/문제 해결
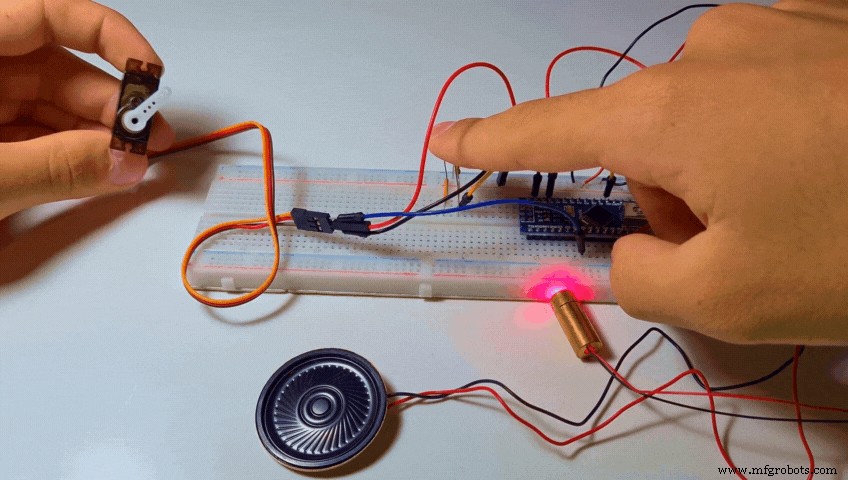
코드가 업로드되면 아무 일도 일어나지 않습니다. 그런 다음 빛이 닿지 않도록 손가락으로 LDR을 덮습니다. 내 손이 레이저 빔을 차단할 때 운동 중에 일어날 일에 대한 거의 시뮬레이션입니다. 두 경우 모두 If 문이 트리거되고 음악이 재생되기 시작한 다음 서보가 회전하여 Tic Tac을 분배합니다.
모든 작업을 제대로 수행하더라도 여기에서 발생할 수 있는 두 가지 일반적인 문제가 있습니다.
<울>팁:
<울>
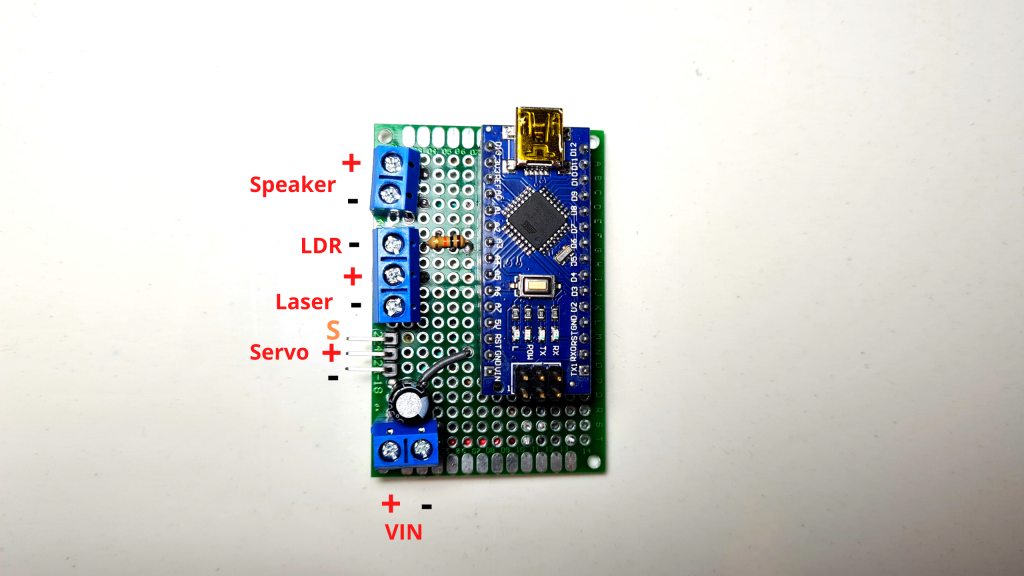
8단계:PCB

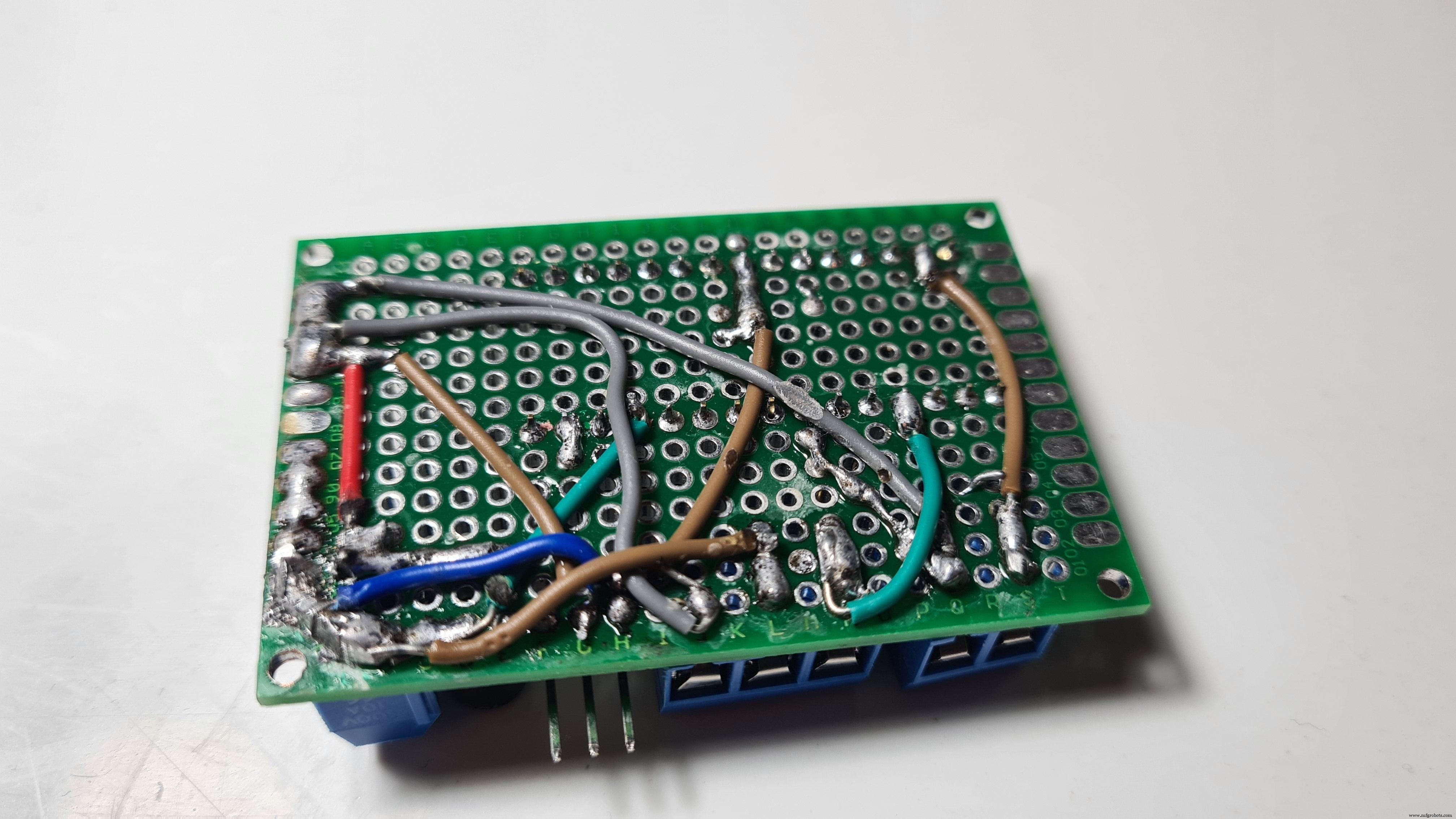
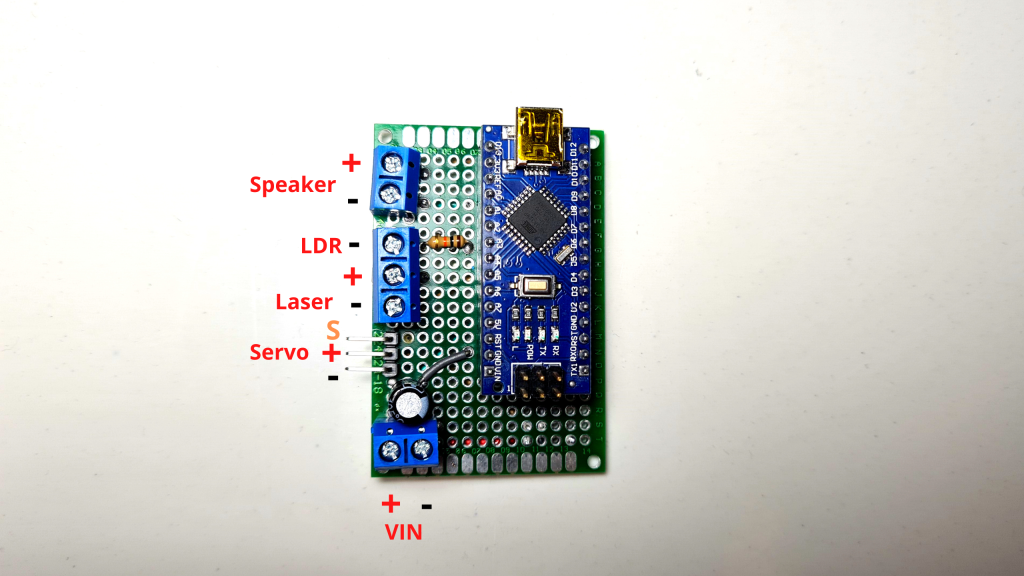
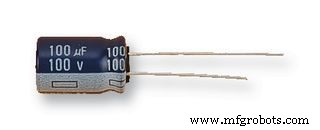
모든 것이 작동하기 때문에 더 작은 인클로저에 모든 구성 요소에 맞는 PCB를 만들 차례입니다. PCB가 이전에 만든 브레드보드 회로와 다른 유일한 차이점은 (+)를 5V에 연결하고 (-)를 GND에 연결하는 전원 입력 단자를 포함하고 100μF 커패시터(선택 사항)를 병렬로 추가하여 매끄럽게 만듭니다. 현재 밖으로.
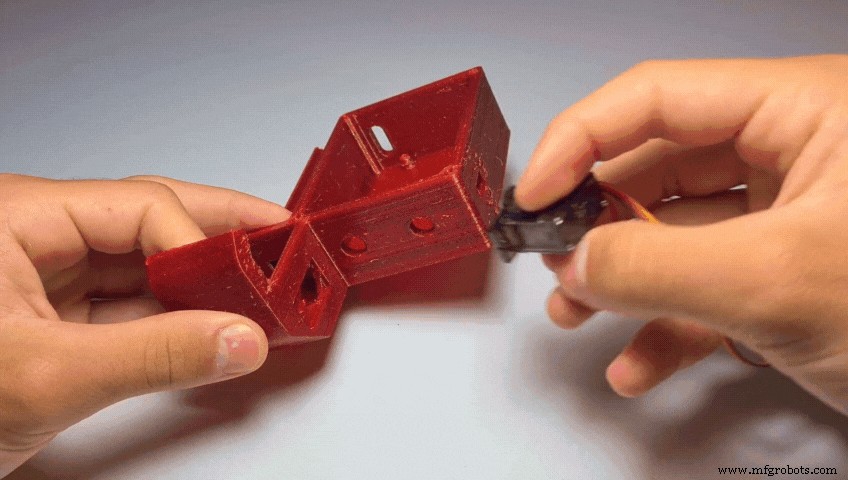
9단계:서보 연결
 <울>
<울>
10단계:레이저를 클램프로 밀어넣기
 <울>
<울>
11단계:클램프에 LDR 부착
 <울>
<울>
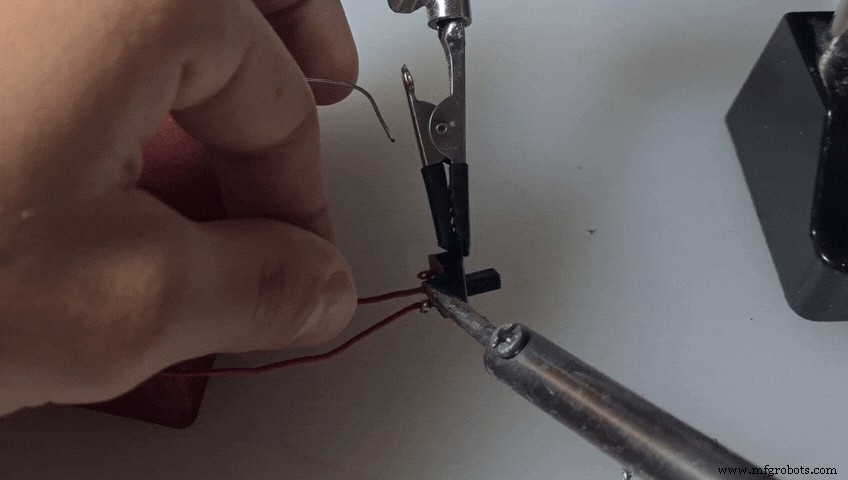
12단계:납땜
 <울>
<울>
13단계:DC 잭 연결
 <울>
<울>
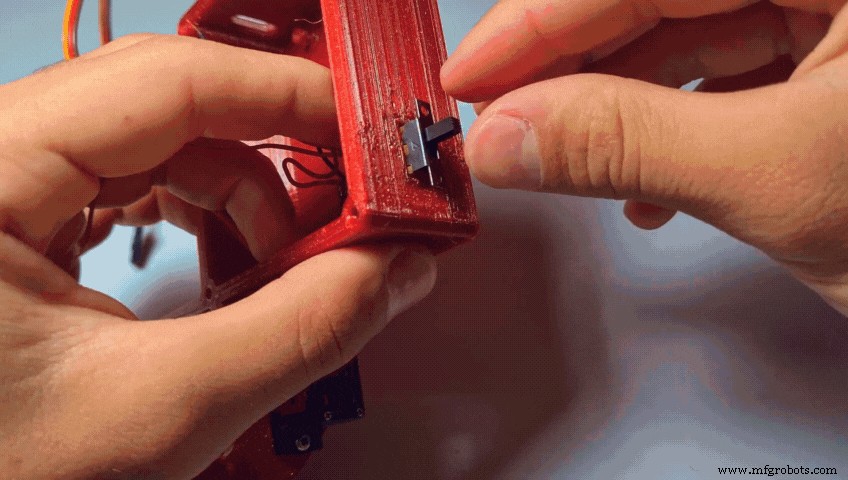
14단계:스위치 납땜
 <울>
<울>
15단계:스위치 연결
 <울>
<울>
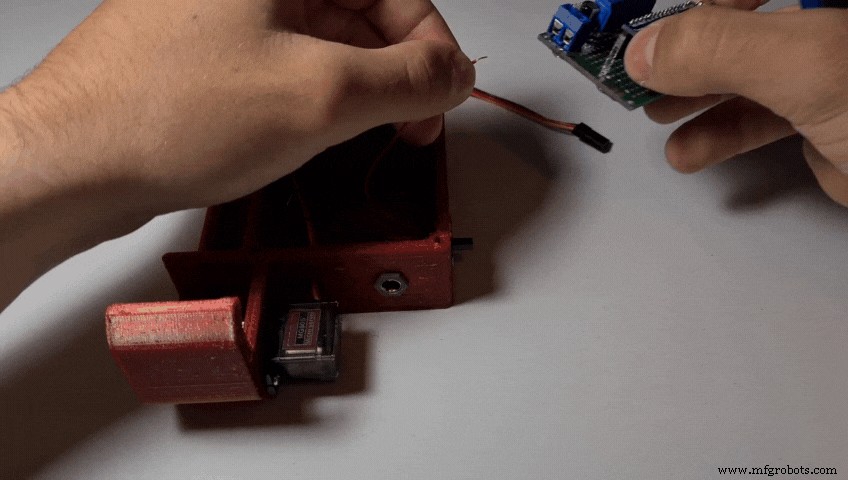
16단계:PCB에 전원 연결
 <울>
<울>
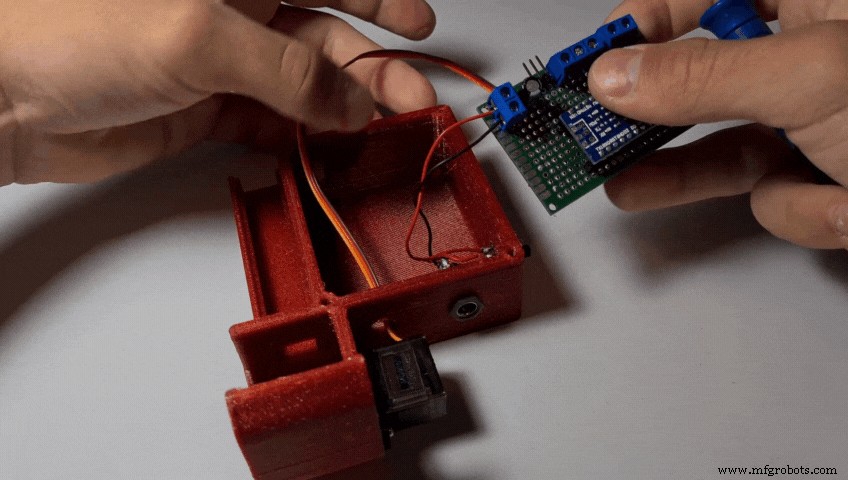
17단계:서보를 PCB에 연결
 <울>
<울>
18단계:스피커를 PCB에 연결
 <울>
<울>
19단계:베이스에 PCB 부착
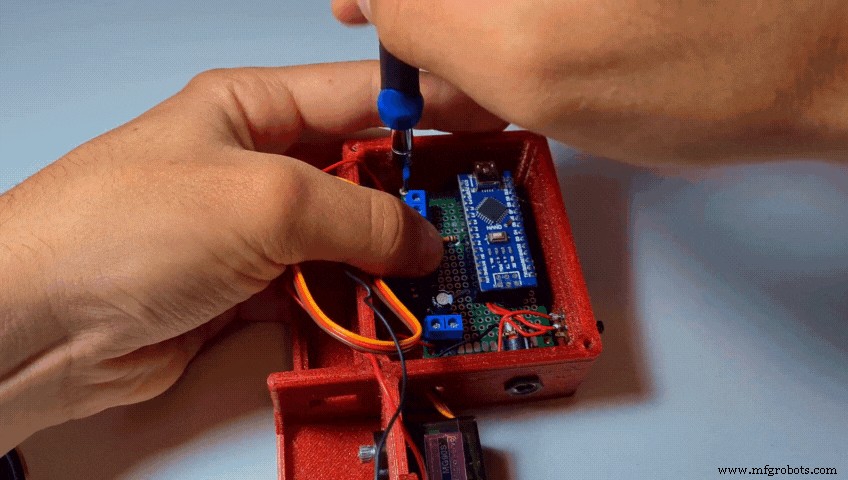 <울>
<울>
20단계:플라스틱 시트 절단 및 설치
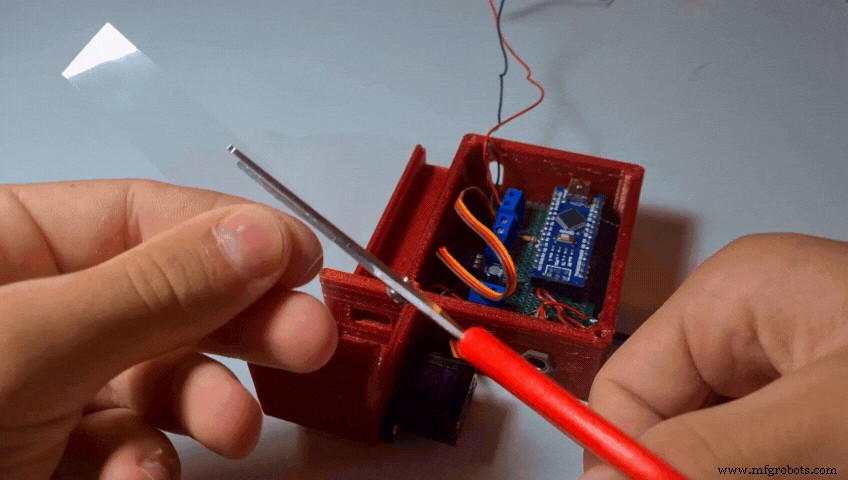
 <울>
<울>
21단계:바에 레이저 설치
 <울>
<울>
22단계:바에 LDR 설치
 <울>
<울>
23단계:레이저와 LDR 정렬
 <울>
<울>
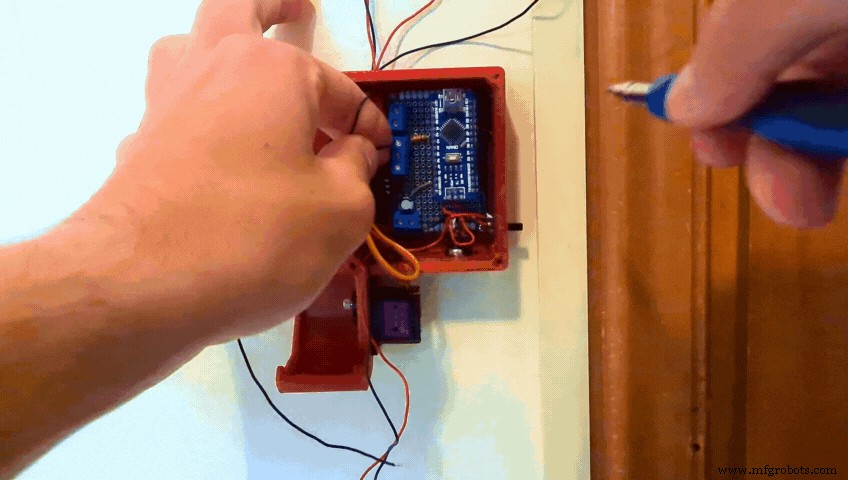
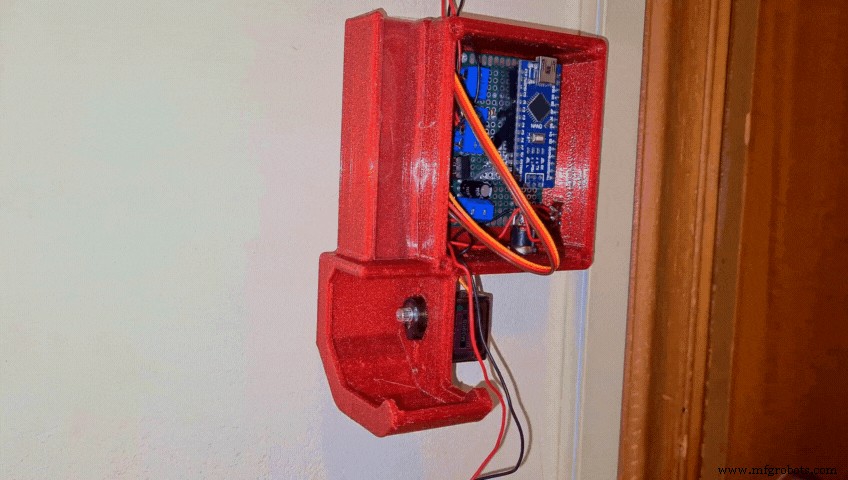
24단계:인클로저를 벽에 붙이기
 <울>
<울>
25단계:레이저와 LDR을 PCB에 연결
 <울>
<울> (물론 이러한 모든 연결은 PCB를 만드는 방법과 경우에 따라 다르며 광산은 개념 참조로 사용할 수 있습니다.)
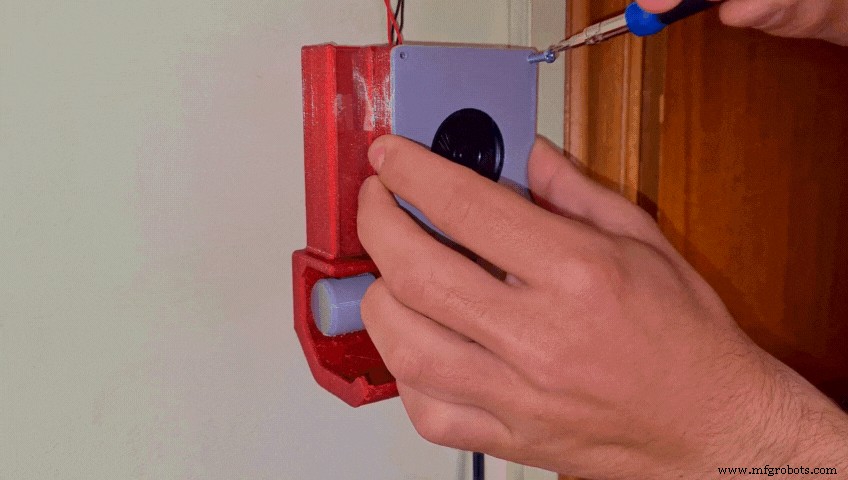
26단계:디스펜서 설치
 <울>
<울> Arduino가 처음 전원을 켜면 서보가 자동으로 0도 위치로 이동합니다. 그리고 제자리에 잠급니다. 그런 일이 발생하면 RotatorDispenser를 연결하십시오. 틱택용 구멍 2개가 제대로 정렬되었는지 확인하세요. .
27단계:표지 추가

 <울>
<울>
28단계:틱택 추가하기!

마지막으로 틱택을 추가하세요...
29단계:축하합니다 프로젝트가 완료되었습니다!

드디어 스마트 풀업바 완성!!
이 튜토리얼을 내가 만든 만큼 즐겼기를 바랍니다! 질문이나 제안 사항이 있으면 알려주세요! 내 YouTube 채널 구독도 고려해 보세요. 더 많은 자습서, 멋진 빌드 및 이 여정을 통해 저를 지원합니다. 좋은 하루 되세요!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">미리보기 없음(다운로드만 가능).
제조공정
바 생산을 위한 슬릿 롤링 기존의 압연 방식을 사용하는 상업 봉 압연기에서 원형 및 철근(둘 모두 일반적으로 봉으로 알려짐)은 다중 스탠드 압연기를 통과하는 일련의 경로로 압연되는 빌렛에서 생산됩니다. 각 스탠드에는 원하는 모양의 패스를 제공하기 위해 둘레에 홈이 파인 두 개의 롤 세트가 있습니다. 빌릿의 단면은 최종 모양과 단면 크기가 얻어질 때까지 일련의 패스로 점차 줄어들고 모양이 지정됩니다. 상업 봉 압연기에서 봉을 압연하는 동안 직경이 작은 봉의 생산성은 일반적으로 직경이 큰 봉보다 낮습니다. 직경이 작은 봉재의 경우
막대, 막대 및 와이어 그리기 드로잉은 강철 공작물을 단면을 줄여서 형성하는 금속 가공 공정입니다. 이것은 공작물보다 작은 단면적의 다이를 통해 공작물을 강제로 통과시켜 수행됩니다. 드로잉 과정에서 공작물은 다이의 출구 끝에 적용된 인장력에 의해 다이를 통해 당겨집니다. 강재를 인발할 때 상온에서 인발한다. 그 시점에서 냉간 가공 또는 냉간 단조입니다. 드로잉 시 냉간 가공으로 인해 강재의 기하학적, 기계적 특성이 변경되고 부피의 변화 없이 가로 치수(예:직경)가 감소하고 길이가 증가합니다(웨이스트 프리 가공). 드로잉 금형