

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
소프트웨어 부분을 살펴보기 전에 하드웨어 키트를 조립해 보겠습니다.
MPU-6050 센서란 무엇입니까 MPU-6050 기기는 3축 자이로스코프를 결합합니다. 및 3축 가속도계 온보드 디지털 모션 프로세서(DMP)와 함께 동일한 실리콘 다이에 , 복잡한 6축MotionFusion을 처리합니다. 알고리즘. 이제 6DOF-6 자유도의 의미를 해독할 수 있습니다.
연결 회로도 및 하드웨어 설정에 대한 자세한 내용은 이전 블로그를 참조하십시오.
이제 이 모션 센서의 3D 시각화를 용이하게 하는 처리 소프트웨어를 살펴보겠습니다.
필요한 소프트웨어:
<울>두 개의 별도 IDE가 포함된 ArduinoIDE를 이미 설치했다는 점을 고려하면 약간 혼란스러울 수 있습니다. 글쎄요, 당황할 필요는 없습니다. 아래 단계를 따르면 모든 의심이 해결됩니다!
처리는 몇 가지 특수 기능을 제외하고 ArduinoIDE와 매우 유사합니다. 따라서 ProcessingIDE에서 영향/유사성을 볼 수 있습니다.
그림 1과 그림 2는 내 진술을 명확하게 해 줄 것입니다.

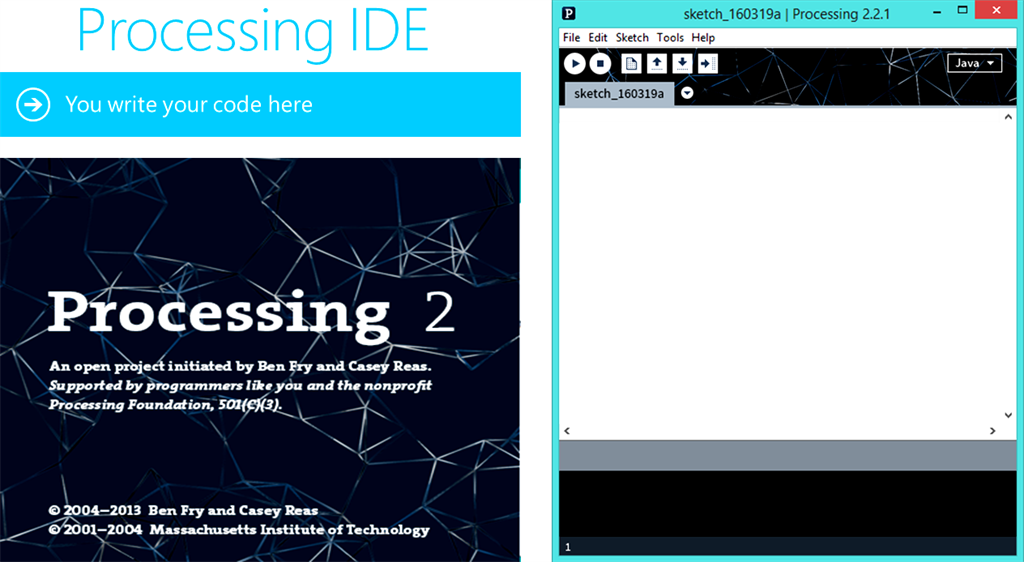
따라서 이 두 IDE에 놀라운 시각적 유사성이 있음을 알 수 있습니다. 이제 Processing IDE를 설치했으므로 처리를 위해 "Toxi"라는 특수 라이브러리를 다운로드해야 합니다. "Toxi" 파일을 찾는 것은 월드 와이드 웹에서 매우 바쁠 수 있습니다. 그래서 내 github에 업로드하여 더 쉽게 만들었습니다. 이 링크를 클릭하고 "toxiclibs-complete-0020"이라는 파일을 다운로드합니다. 다음으로 폴더의 압축을 풉니다. "toxiclibs-complete-0020" 복사 폴더를 만들고 "라이브러리" 아래에 붙여넣습니다. Processing.Cant의 폴더는 "라이브러리 폴더를 찾을 수 없습니다. "? 그럼 만드세요! 예. "라이브러리를 찾을 수 없다면 " 폴더, 폴더를 만들고 이름을 "libraries ". 이제 "toxiclibs-complete-0020"을 붙여넣습니다. 폴더 안에 있습니다. 이 단계를 올바르게 수행한 후 Processing IDE를 실행하십시오. 코딩할 시간입니다! 3D 시각화를 시각화하려면 먼저 MPU-6050용 Arduino 코드를 업로드해야 합니다(MPU6050_DMP6.rar 폴더에서 .ino 파일 추출). 그렇게 한 후 아래와 같이 특정 변경을 해야 합니다. 이 코드에 다음과 같이 주석을 달아야 합니다.
#define OUTPUT_READABLE_YAWPITCHROLL // #define OUTPUT_READABLE_YAWPITCHROLL 기준
마찬가지로 다음과 같은 코드의 주석 처리를 제거합니다.
//#define OUTPUT_TEAPOT #define OUTPUT_TEAPOT 기준
다음으로 MPU-6050의 처리 예제를 엽니다. 도구 모음으로 이동하여 파일 -> 열기를 클릭합니다. 그런 다음 Arduino용 MPU-6050 라이브러리를 설치한 폴더로 이동합니다. MPU6050> Examples> MPU6050_DMP6> Processing> MPUTeapot의 순서를 따라가면 처리 예제를 쉽게 찾을 수 있습니다. ArduinoIDE의 경우와 마찬가지로 이 경우에도 직렬 포트가 정의되어 있는지 확인하십시오. 이제 코드를 확인하세요. 기본적으로 linux/mac에 대해 정의되어 있는 줄을 알 수 있습니다. 사용자:
문자열 포트 이름=="/dev/ttyUSB1";
String portName을 Arduino가 연결된 포트로 변경해야 합니다. 그림 3을 참조하십시오.

창의 경우 사용자는 이 코드를 다음과 같이 주석 처리합니다.
<코드>//문자열 포트 이름 ="/dev/ttyUSB1";
마찬가지로 이 코드의 주석을 다음과 같이 제거합니다.
//String portName ="COM15"; 문자열 portName="COM15" 기준;
"COM15 교체 " arduino가 연결된 COM 포트를 사용합니다(arduino 및 도구 -> 직렬 포트로 이동하여 확인). 이제 마지막으로 설정이 완료되었습니다. 이제 몇 분이면 됩니다! Arduino 코드(MPU6050_DMP6) 업로드 Arduino를 통해.참고: 프로세스가 진행되는 동안 직렬 모니터를 열지 마십시오.(왜? ArduinoIDE 대신 ProcessingIDE에서 코드를 시각화하기 때문입니다)
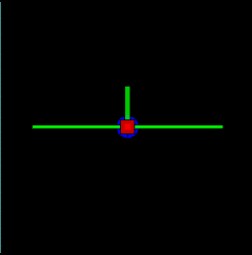
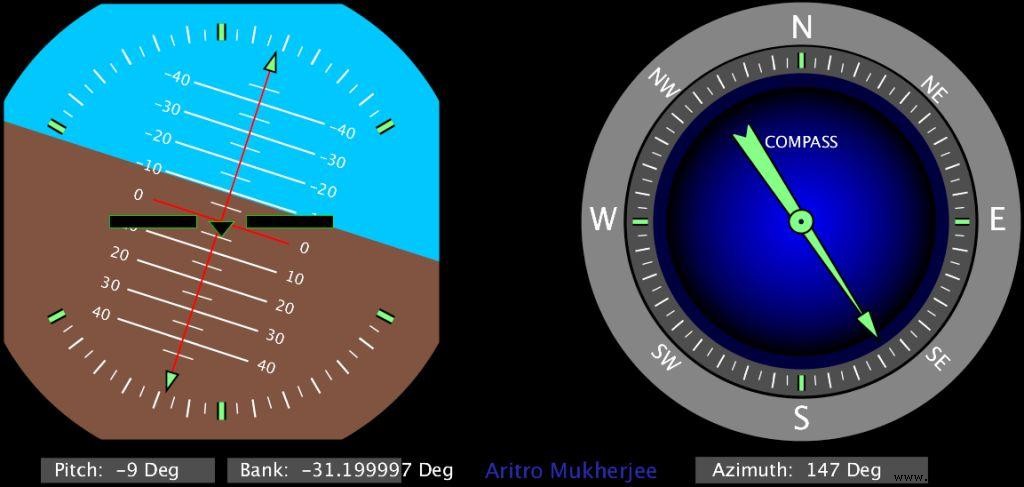
그런 다음 "재생" 버튼을 눌러 처리 코드(MPUTeapot)를 실행합니다. 상징. 물체와 같은 작은 평면이 보일 것입니다. MPU-6050 값이 안정화될 때까지 약 10-12초 동안 기다리십시오. 그러면 MPU-6050 센서에 따라 3D 모델이 움직이는 것을 볼 수 있습니다. 아래 GIF를 참조하세요. 이해를 돕기 위해 YouTube로 이동
다음 튜토리얼에서 나만의 맞춤형 비행 시뮬레이터 기기를 디자인하세요.
하드웨어/소프트웨어 설정에 문제가 있는 경우 아래에 의견을 보내주십시오.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">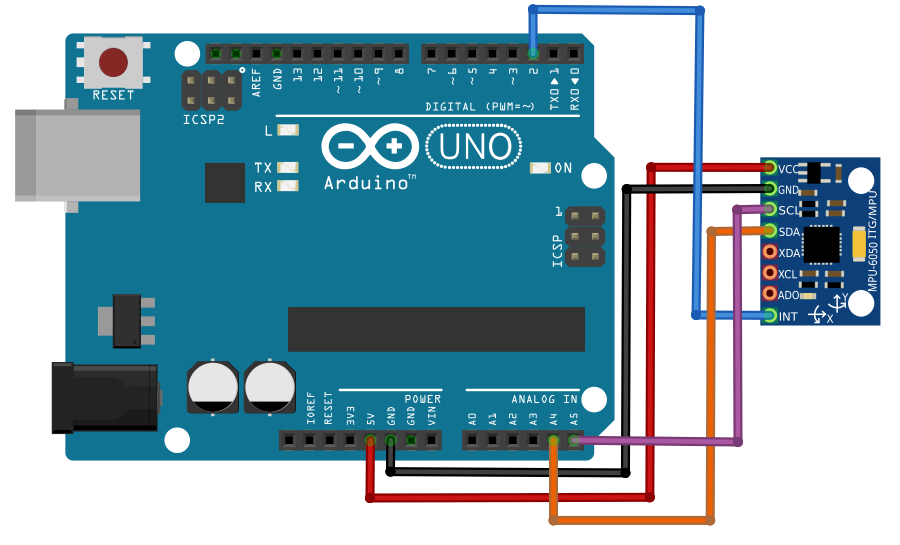
제조공정
구성품 및 소모품 Arduino UNO × 1 관성 측정 단위(IMU)(6도 자유도) × 1 이 프로젝트 정보 오늘 우리는 가장 사용 가능한 IMU(관성 측정 장치) 센서에 대해 연구하고 Arduino와 인터페이스할 수 있는 방법을 알아봅니다. 다음 튜토리얼의 뒷부분에서 우리는 3D로 모션 센싱을 시도하고 시각화할 것입니다. 우리가 사용할 IMU 센서 모듈은 MPU-6050 센서를 중심으로 합니다. MPU-6050 기기는 3축 자이로스코프를 결합합니다. 및 3축 가속도계
수많은 외부 센서를 접했을 것이지만 MPU 9250 Arduino는 틀림없이 최고 중 하나입니다. 이 9축 MEMS 센서가 뛰어난 이유와 이전 버전에 대한 추가 기능에 대해 논의할 것입니다. MPU 9250 Arduino란 무엇입니까? 그림 1:모션 센서 이것은 Arduino와도 호환되는 MEM(Micro-Electro-Mechanical System) 센서입니다. 따라서 동작 추적 측정 및 응용 프로그램에서 효과적인 도구입니다. 아두이노 우노와의 호환성은 물론, 상대적으로 전력 소모가 적은 고성능 부품입니다.