

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 |
 |
| |||
| ||||
|
 |
|
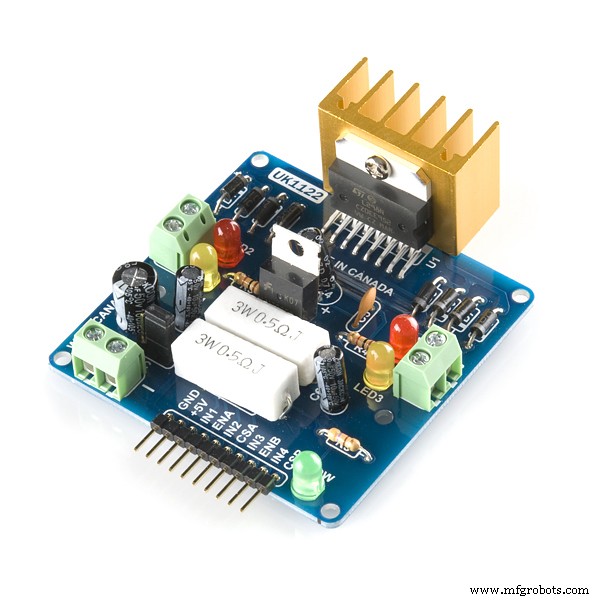
라인 팔로워 로봇은 Hello World to Robotics Arena입니다. 이 라인 팔로워는 매우 간단하고 쉽게 로봇을 만들 수 있습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">/*-------입력 정의------*/#define LS 2 // 왼쪽 센서#define RS 5 // 오른쪽 센서/*-------출력 정의- -----*/#define LM1 11 // 왼쪽 모터#define LM2 10 // 왼쪽 모터#define RM1 9 // 오른쪽 모터#define RM2 6 // 오른쪽 motorvoid setup(){ pinMode(LS, INPUT); 핀모드(RS, 입력); 핀모드(LM1, 출력); 핀모드(LM2, 출력); 핀모드(RM1, 출력); pinMode(RM2, OUTPUT);}void 루프(){if((digitalRead(LS)==LOW) &&(digitalRead(RS)==LOW)) // Condition_1 stop{ MoveForward(); } if((digitalRead(LS)==HIGH) &&(digitalRead(RS)==HIGH)) //CONDITION-2 FORWRD { Stop(); } if((digitalRead(LS)==LOW) &&(digitalRead(RS)==HIGH)) // 오른쪽 { TurnLeft(); } if((digitalRead(LS)==HIGH) &&(digitalRead(RS)==LOW)) { TurnRight(); }} 무효 MoveForward(){ analogWrite(LM1, 50); 아날로그 쓰기(LM2, 0); analogWrite(RM1, 50); 아날로그 쓰기(RM2, 0); 지연(20);} 무효 TurnRight(){ analogWrite(LM1, 0); analogWrite(LM2, 60); analogWrite(RM1, 60); 아날로그 쓰기(RM2, 0); 지연(30); } 무효 TurnLeft(){ analogWrite(LM1, 60); 아날로그 쓰기(LM2, 0); 아날로그 쓰기(RM1, 0); analogWrite(RM2, 60); 지연(30);}중지 무효(){ analogWrite(LM1, 0); 아날로그 쓰기(LM2, 0); 아날로그 쓰기(RM1, 0); 아날로그 쓰기(RM2, 0); 지연(20);} 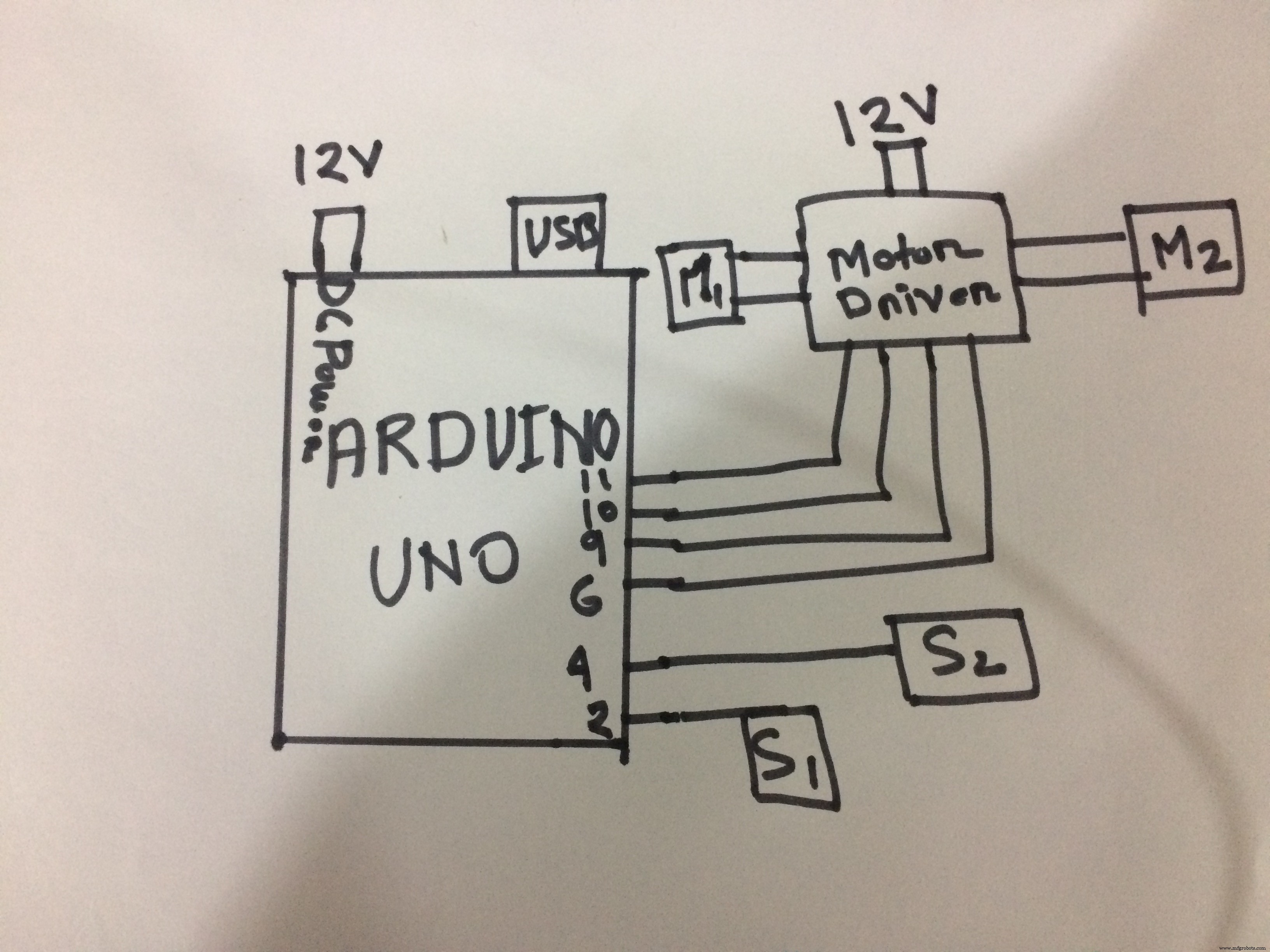
제조공정
이 튜토리얼에서는 어떤 방향으로든 움직일 수 있는 Arduino Mecanum Wheels 로봇을 만드는 방법을 배울 것입니다. 로봇의 이러한 독특한 이동성은 메카넘 휠(Mecanum Wheels)이라는 특수한 유형의 바퀴를 사용하여 이루어집니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 저는 실제로 이 휠을 디자인하고 3D로 인쇄했습니다. 구매 비용이 조금 비쌀 수 있기 때문입니다. 그것들은 아주 잘 작동하고 나는 이 로봇 플랫폼을 운전하는 것이 매우 재미있다고 말해야 합니다. NRF24L01
이 튜토리얼에서는 Arduino hexapod를 구축하는 방법을 보여줍니다. 이름에서 알 수 있듯이 헥사포드에는 6개의 다리가 있지만 그 외에도 꼬리 또는 복부, 머리, 안테나, 하악 및 기능적인 눈도 있습니다. 이 모든 것이 헥사포드를 개미처럼 보이게 하므로 Arduino Ant Robot이라고도 부를 수 있습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 로봇을 제어하기 위해 맞춤형 Android 애플리케이션을 만들었습니다. 앱에는 4개의 버튼이 있어 로봇에게 전진 또는 후진, 좌회전 또는 우