

제조공정

산업 제조
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
 |
|
 |
| |||
|
약
이것은 위치를 기록하고 재생할 수 있는 간단한 로봇 팔입니다. 판지나 핫 글루와 같이 쉽게 구할 수 있는 재료로 만들어졌기 때문에 쉽게 만들 수 있습니다.
팔을 제어하는 Arduino에 데이터를 보내는 컴퓨터의 그래픽 인터페이스를 사용하여 팔을 제어합니다. 각 서보를 제어하는 슬라이더와 위치를 기록하고 기록을 재생하는 버튼이 있습니다. 과거 녹음을 저장하고 열 수도 있습니다.
다음은 실제 데모입니다.
지침
1.) 페이지 하단의 맞춤형 부품 및 인클로저 섹션에서 Cardboard Cutout Template을 다운로드하여 인쇄합니다. 이 템플릿을 사용하여 판지 부분을 잘라냅니다.
2.) 위의 영상을 참고하여 Arm 부분을 조립합니다. 빌드는 동영상 0분 22초부터 시작됩니다.
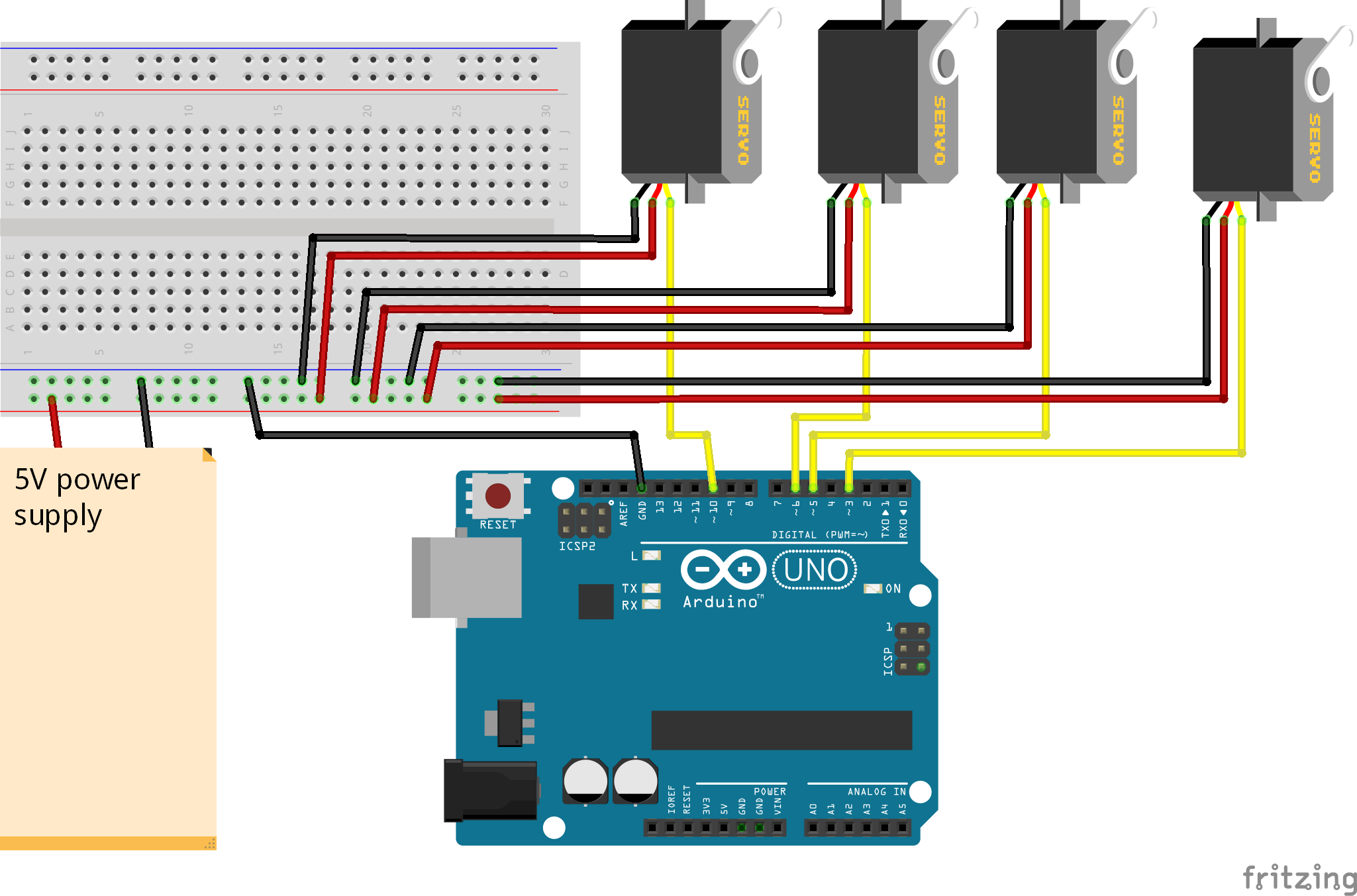
3.) 페이지 하단의 회로도를 기반으로 회로를 구성합니다.
4.) 두 번째 탭의 코드 섹션에서 페이지 하단의 "로봇 암 Arduino 코드"를 다운로드합니다. 그런 다음 이를 팔에 업로드합니다.
5.) 첫 번째 탭의 코드 섹션에서 페이지 하단의 "Python 사용자 인터페이스" 코드를 다운로드합니다. 그런 다음 엽니다. 실행하려면 Python이 설치되어 있어야 하며 https://www.python.org/
에서 다운로드할 수 있습니다.Python용 PySerial 라이브러리(https://pypi.org/project/pyserial/)도 필요합니다. "pip install pyserial"을 실행하여 설치할 수 있습니다.
6.) 암을 연결하고 "Python 사용자 인터페이스" 코드를 실행한 다음 Arduino의 COM 포트를 입력합니다(Windows의 장치 관리자에서 찾을 수 있음). 이제 사용할 준비가 되었습니다!
작동하지 않으면 Python 코드의 20행에서 time.sleep(0.15)를 0.2 또는 0.3과 같이 더 높은 값으로 늘리십시오.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">#include서보 서보1;서보 서보2;서보 서보3;서보 서보4;서보 서보5;int servoPositions[5];void setup() { Serial.begin(9600); 서보1.attach(3); 서보2.부착(5); 서보3.부착(6); 서보4.부착(9); 서보5.attach(10);} 무효 루프() { while(Serial.available()){ 문자열 입력 =Serial.readStringUntil('\n'); 서보포지션[0] =input.substring(0,3).toInt(); 서보포지션[1] =input.substring(3,6).toInt(); 서보포지션[2] =input.substring(6,9).toInt(); 서보포지션[3] =input.substring(9,12).toInt(); 서보포지션[4] =input.substring(12,15).toInt(); } 서보1.write(servoPositions[0]); 서보2.write(servoPositions[1]); 서보3.write(servoPositions[2]); 서보4.write(servoPositions[3]); 서보5.write(servoPositions[4]); 지연(500);}
제조공정
이 튜토리얼에서는 어떤 방향으로든 움직일 수 있는 Arduino Mecanum Wheels 로봇을 만드는 방법을 배울 것입니다. 로봇의 이러한 독특한 이동성은 메카넘 휠(Mecanum Wheels)이라는 특수한 유형의 바퀴를 사용하여 이루어집니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 저는 실제로 이 휠을 디자인하고 3D로 인쇄했습니다. 구매 비용이 조금 비쌀 수 있기 때문입니다. 그것들은 아주 잘 작동하고 나는 이 로봇 플랫폼을 운전하는 것이 매우 재미있다고 말해야 합니다. NRF24L01
이 튜토리얼에서는 Arduino hexapod를 구축하는 방법을 보여줍니다. 이름에서 알 수 있듯이 헥사포드에는 6개의 다리가 있지만 그 외에도 꼬리 또는 복부, 머리, 안테나, 하악 및 기능적인 눈도 있습니다. 이 모든 것이 헥사포드를 개미처럼 보이게 하므로 Arduino Ant Robot이라고도 부를 수 있습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 로봇을 제어하기 위해 맞춤형 Android 애플리케이션을 만들었습니다. 앱에는 4개의 버튼이 있어 로봇에게 전진 또는 후진, 좌회전 또는 우