

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
 |
|
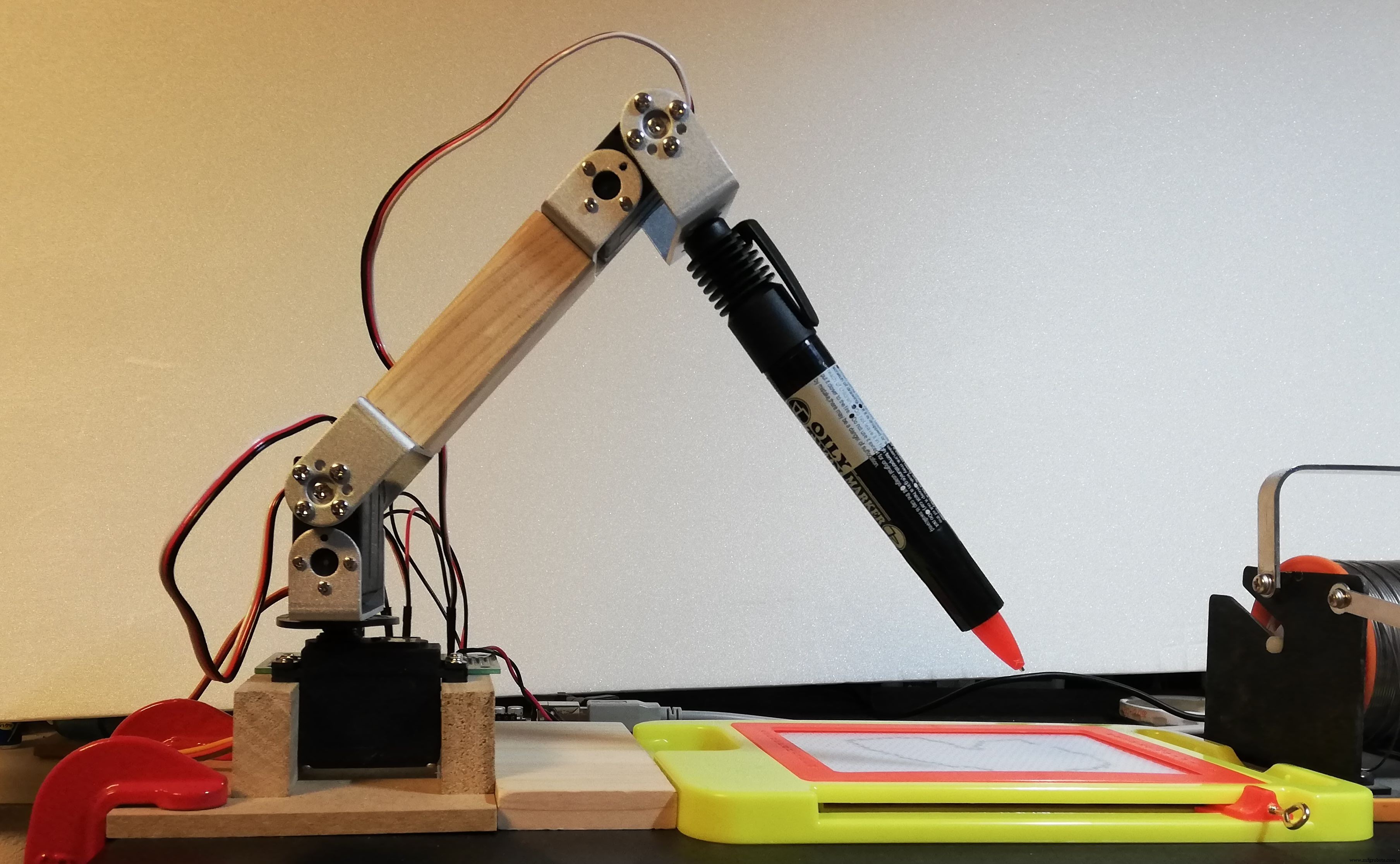
오봇팔과 컨트롤러를 만들었습니다.
헌법
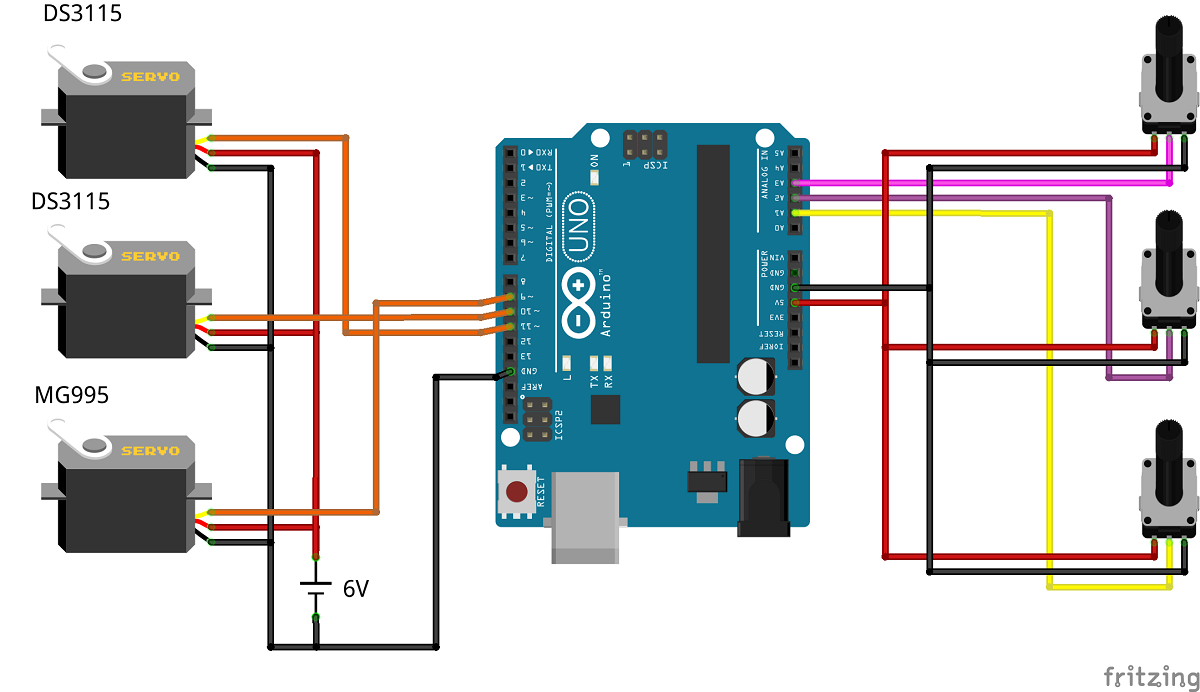
로봇팔은 3개의 기존 PWM 서보를 사용하며 각 각도는 가변저항으로 제어된다. 회전식 전위차계는 B 곡선 10k ohm을 사용했습니다.
로봇 팔 생산
수직 방향은 2개의 DS3115 서보 모터를, 스윙 방향은 MG995 서보 모터를 사용했습니다.
컨트롤러 생산
3D 프린터로 컨트롤러 케이스를 만들었어요.
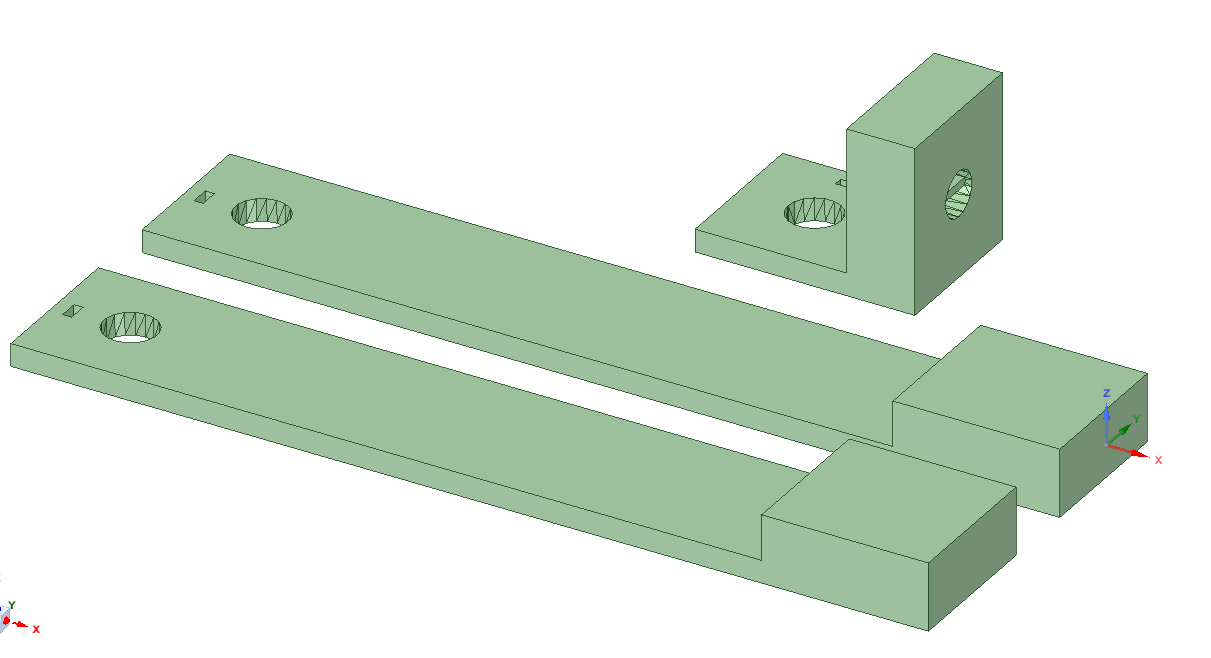
회전식 전위차계의 손잡이에 나사를 조이기 위한 구멍과 위치 결정 구멍, 손잡이를 삽입하기 위한 움푹 들어간 곳이 제공됩니다.

조립된 부품과 3개의 회전식 전위차계를 조립하여 완성하세요!
로터리 포텐셔미터는 이제 로봇 팔의 서보 모터의 회전 축과 같은 방향으로 배치되었습니다!
Arduino 코드
이 간단한 코드는 단순히 아날로그 핀으로 회전식 전위차계의 값을 읽고 각도로 변환하여 해당 서보에 입력합니다.
#include
서보 myservo1, myservo2, myservo3;
float th1=90.0,th2=90.0,th3=90.0;
플로트 val1, val2, val3;
무효 설정() {
Serial.begin(9600);
myservo1.attach(9, 500, 2420); //MG995
myservo2.attach(10, 820, 2140); //DS3115
myservo3.attach(11, 820, 2140); //DS3115
set_servo();
}
void 루프() {
val1 =analogRead(A1);
val2 =analogRead(A2);
val3 =analogRead(A3);
th1 =map(val1, 170.0, 880.0, 0.0, 180.0);
if(th1>=180.0){
th1 =180.0;
}else if(th1 <=0.0){
th1 =0.0;
}
th2 =map(val2, 150.0, 860.0, 0.0, 180.0);
if(th2>=180.0){
th2 =180.0;
}else if(th2 <=0.0){
th2 =0.0;
}
th3 =지도(val3, 860.0, 160.0, 0.0, 180.0);
if(th3>=180.0){
th3 =180.0;
} else if(th3 <=45.0){
th3 =45.0;
}
set_servo();
}
set_servo( ){
myservo1.write(th1);
myservo2.write(th2);
myservo3.write(th3);
}
작업
회전 전위차계를 배선하고 Arduino에 연결하면 완료됩니다!
제조공정
로봇 스튜디오의 투자 수익을 극대화하는 가장 좋은 방법은 오프라인 프로그래밍입니다. 시뮬레이션 및 오프라인 프로그래밍 소프트웨어인 ABB의 RobotStudio를 사용하면 생산 중단 없이 로봇 프로그래밍을 수행할 수 있습니다. 제조가 예정대로 진행되는 동안 사무실의 PC는 프로그래밍에 사용됩니다. RobotStudio를 사용하면 작업자가 생산을 방해하지 않고 교육, 프로그래밍 및 최적화를 수행할 수 있습니다. 위험 감소, 빠른 시작, 짧은 전환 및 생산성 향상이 모두 결과적인 이점입니다. RobotStudio는 프로덕션에서 로봇
로봇 컨트롤러는 전체 로봇 시스템의 두뇌입니다. 그것 없이는 로봇은 복잡한 응용 프로그램을 수행하는 데 필요한 프로그래밍을 알 방법이 없습니다. 컨트롤러 보드는 로봇 컨트롤러 내부에 있으며 모든 와이어와 케이블이 컨트롤러에 연결되는 마법이 시작되는 곳입니다. 이러한 전선과 케이블은 컨트롤러에서 로봇 팔로 이어지는 정보 고속도로입니다. 다양한 유형의 컨트롤러 보드가 있지만 오늘날의 USB 시장에는 교체 또는 수리를 위해 쉽게 연결하고 분리할 수 있는 USB 포트가 있는 것이 많습니다. 각 컨트롤러 보드는 다양한 항목을 제어할 수 있