

제조공정

산업 제조
<메인 클래스="사이트 메인" id="메인">
이것은 제 메카트로닉스 마지막 해 프로젝트였습니다. 스코페에 있는 기계공학부에서. 실제 팔 움직임과 3D 컴퓨터 모델의 상호작용을 가능하게 하는 기기를 개발하는 것이 목표였습니다. 나는 하나의 장치에 세 가지 다른 분야를 통합했습니다. 기계, 전기 및 컴퓨터 공학:
다음 비디오에서 프로젝트의 프레젠테이션을 볼 수 있습니다. 내용은 다음과 같습니다.
 <그림 클래스="aligncenter">
<그림 클래스="aligncenter"> 
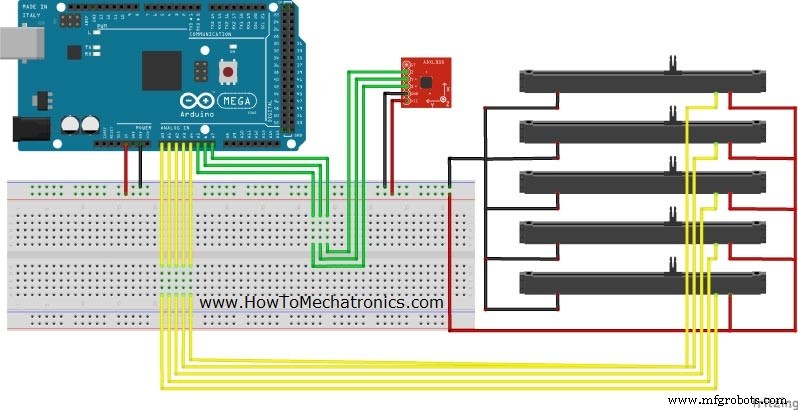
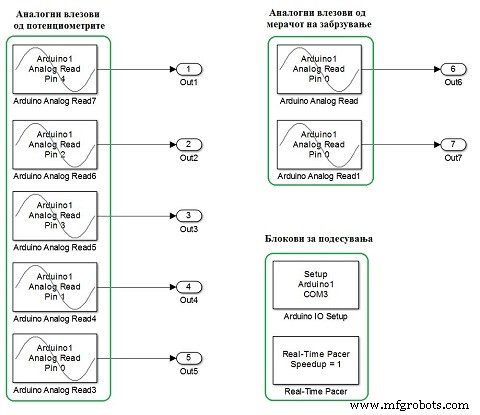
가속도계는 팔의 방향을 추적하는 데 사용됩니다. 암이 움직이면 가속도계의 X, Y, Z축 값이 변경되고 Arduino 보드의 아날로그 입력에서 읽힙니다. 그들에 따르면 3D 모델도 움직입니다.
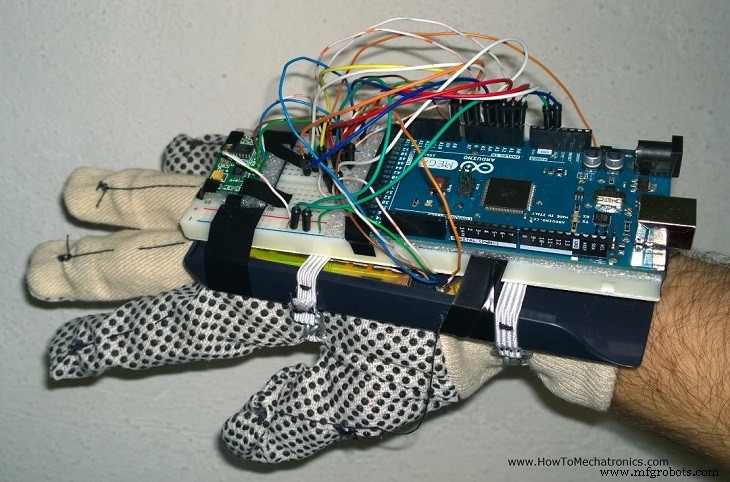
전위차계는 손가락의 위치를 추적하는 데 사용됩니다. 각 전위차계에 스프링(펜 스프링)을 부착했습니다. 스프링은 전위차계 슬라이더를 특정 위치에 고정하고 손가락이 움직이면 슬라이더가 당겨지고 전위차계의 저항이 변경됩니다. 아두이노 보드의 아날로그 입력에서 그 값을 읽고, 그에 따라 3D 모델의 손가락도 움직입니다.
나는 5개의 전위차계를 부착한 기초로 계산기의 플라스틱 덮개를 사용했습니다. 그 위에 아두이노 보드를 고정한 브레드보드와 가속도계를 테이프로 붙였습니다. 아래 사진에서 장치의 최종 모습을 볼 수 있습니다.
3D 모델은 사람의 팔을 표현한 것입니다. 먼저 Solidworks를 사용하여 모델링한 다음 Matworks의 SimMechanicsLink를 사용하여 Matlab/Simulink로 전송했습니다.
<그림 클래스="wp-block-image"> <그림 클래스="wp-block-image">
<그림 클래스="wp-block-image"> 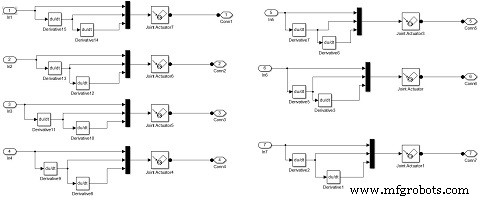
Simulink 모델을 빌드하기 전에 먼저 Arduino 보드와 통신하기 위한 Simulink 라이브러리로 구성된 Arduino IO 패키지를 설치해야 했습니다. 또한 Arduino IDE를 사용하여 Simulink 라이브러리를 활성화하기 위해 패키지와 함께 제공되는 Arduino 보드에 코드를 업로드해야 했습니다. 여기에서는 작동 원리를 이해하고 코드를 볼 수 있도록 Matlab 및 Arduino IO 패키지에 대한 자습서를 적극 권장합니다.
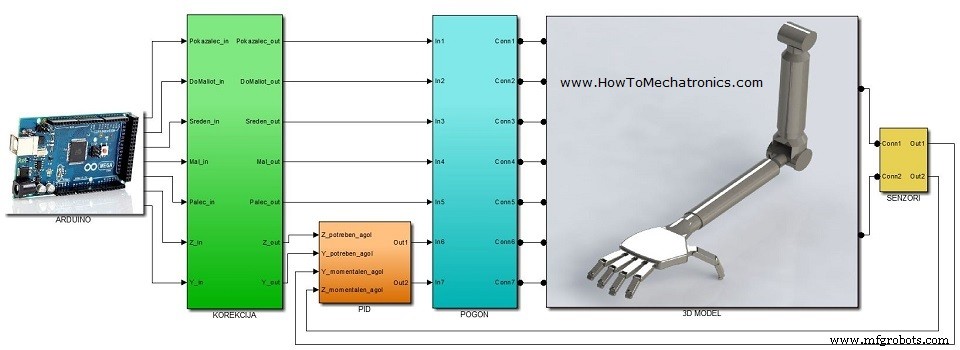
저는 Simulink 모델을 6개의 하위 시스템으로 구성했습니다.
 <그림 클래스="aligncenter">
<그림 클래스="aligncenter"> 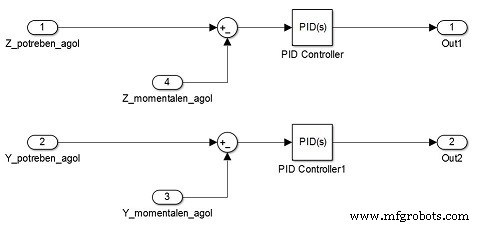 <그림 클래스="aligncenter">
<그림 클래스="aligncenter"> 여기에서 Simulink 모델을 다운로드할 수 있습니다.
이 프로젝트의 내 확장을 확인하십시오.
Arduino Glove를 게임 컨트롤러로 다시 프로그래밍했습니다.

제조공정
30개의 전자 제품 최종 연도 프로젝트 아이디어 목록 학생 다음 기사에서는 전자 공학 학생을 위한 최종 해 최고의 프로젝트 목록 아이디어를 보여줍니다. . 자동 차량 식별 및 유료 통행 시스템 이 프로젝트는 요금소에서 자동 차량 식별 및 통행료 징수를 가능하게 합니다. 차량별로 고유한 ID를 제공하는 RFID 칩과 차주에게 세금공제 정보를 제공하는 GSM 모듈을 이용하여 식별이 가능합니다. 연료, 시간 등을 절약하는 매우 효율적인 시스템입니다. 건강 모니터링 웨어러블 장갑 IoT 기반 이 프로젝트에서는 착용자의 건
공학 마지막 해 학생을 위한 85개 이상의 전기 프로젝트 다음 기사에서는 전기 공학 학생을 위한 최종 연도 최고의 프로젝트 목록 아이디어를 보여줍니다. 팔로워, 특히 뉴비와 EE 최종 학년 학생들로부터 이메일과 페이지 받은 편지함에 너무 많은 문의를 받고 있기 때문입니다. 관련 분야에서 최고의 아이디어와 전기 프로젝트가 소개될 때마다 목록을 업데이트할 예정입니다. 일시적인 오류에 대한 자동 재설정 및 영구 오류에 대한 트립이 있는 3상 오류 분석 : 이 프로젝트의 목적은 3상 시스템의 오류를 확인하고 오류가 영구적인 경우 전원