

산업기술

산업 제조
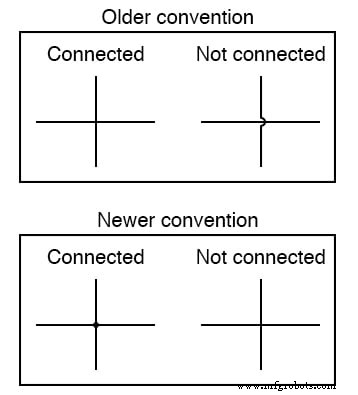
이전 전기 회로도에서는 연결 와이어가 교차하는 반면 연결되지 않은 와이어는 "뛰어넘었습니다. ” 작은 반원 표시로 서로 위에 표시됩니다. 최신 전기 회로도는 연결 와이어가 점으로 결합되는 반면 연결되지 않은 와이어는 점이 없이 교차하는 것을 보여줍니다. 그러나 일부 사람들은 여전히 점 없이 교차하는 전선을 연결하는 기존 규칙을 사용하므로 혼동을 일으킬 수 있습니다.
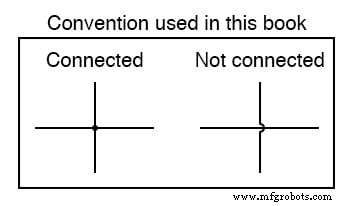
이러한 이유로 연결 와이어는 점으로 명확하게 연결되고 연결되지 않은 와이어는 "점프 ” 반원 표시로 서로 위에 표시됩니다. 일부 사람들은 이것이 눈살을 찌푸릴 수 있지만 해석 오류의 여지를 남기지 않습니다. 각각의 경우 의도가 명확하고 틀림이 없습니다.
산업기술
로봇 시스템에는 로봇의 여러 다른 영역에서 컨트롤러로 그리고 다시 돌아오는 전선과 케이블이 있습니다. 와이어링 및 케이블링 하니스를 사용함으로써 회사는 각 와이어 또는 케이블을 고유한 포트에 연결해야 하는 것과는 반대로 배선 세트에 대해 여러 개의 큰 포트 또는 플러그가 있을 수 있는 방식으로 이러한 케이블 및 와이어를 함께 그룹화할 수 있습니다. 포트. 산업 자동화, 항공 우주 기술, 컴퓨터, 심지어 러닝 머신 및 타원형 트레이너와 같은 피트니스 장비를 포함하여 와이어 및 케이블 하네스를 사용하는 여러 가지 유형의 전자 장치가
Sherline CNC 시스템 구성 요소 및 연결. 시스템 구성요소 1) 1-5/8″ 수동 핸드휠2) Z축 스테퍼 모터3) 스테퍼 모터 마운트4) 표준 액세서리가 있는 Sherline 수직 밀(그림은 모델 2000 밀)5) 백업 Linux/EMC2 설치 CD, Sherline 지침 CD6) Y축 스테퍼 모터7) X축 스테퍼 모터8) 선택적 A축용 케이블(CNC) 회전 테이블) 연결9) 키보드 및 마우스가 있는 컴퓨터10) 스테퍼 모터 전원 공급 장치용 켜기/끄기 스위치11) USB 드라이브 포트(전면)12) CD -RW 드라이