

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
 |
|
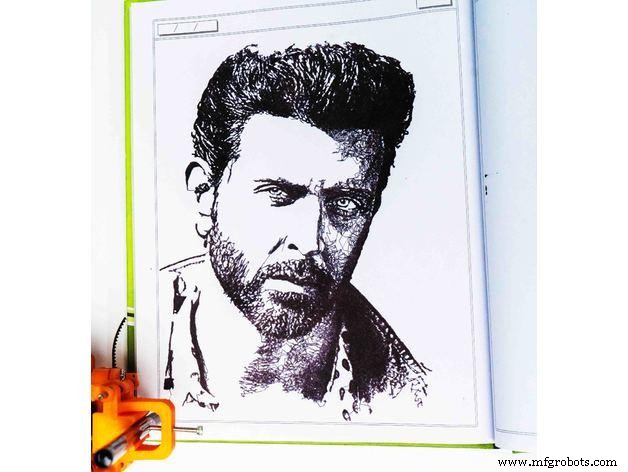
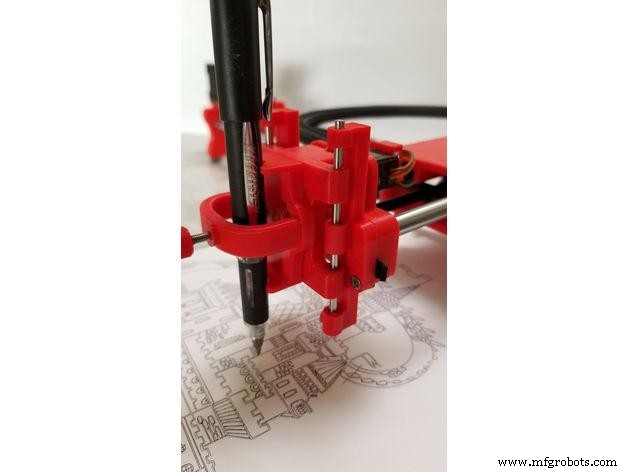
Drawing Robot/Pen Plotter/Drawing Machine은 거의 모든 평평한 표면에 쓰거나 그릴 수 있는 펜 플로터인 유명한 기계 AxiDraw의 개방형 하드웨어 버전입니다. 펜, 영구 마커, 연필 및 기타 필기 도구로 필기할 수 있어 끝없이 다양한 응용 프로그램을 처리할 수 있습니다.
독특한 디자인에는 기계 너머까지 확장된 쓰기 헤드가 있어 기계 자체보다 큰 물체에도 그림을 그릴 수 있습니다. 기계의 가장 큰 장점은 기계의 핵심 XY 확장 설계로 인해 책 위에 놓을 수 있다는 것입니다.
이 드로잉 로봇/펜 플로터/드로잉 머신은 시판되는 AxiDraw와 유사합니다. Arduino Uno 컨트롤러로 구동되며 CNC Shield 및 GRBL 펌웨어를 사용합니다.
드로잉 로봇을 만드는 데 드는 비용은 부품 구입처와 Arduino와 같은 부품을 이미 소유하고 있는지 여부에 따라 75달러 사이입니다.
https://www.diyprojectslab.com/
에서 내 모든 프로젝트를 찾을 수 있습니다.최대 그리기 영역 24 * 30CM.
NextPCB 감사합니다
이 프로젝트는 NextPCB의 도움과 지원으로 성공적으로 완료되었습니다. 여러분, PCB 프로젝트가 있다면 웹사이트를 방문하여 흥미로운 할인과 쿠폰을 받으세요.
무료 배송 0$ PCB 프로토타입:https://www.nextpcb.com/pcb-quote?act=2&code=Romeo...
추수감사절 크리스마스 럭키드로우 100% 당첨:https://www.nextpcb.com/christmas-lucky-draw?code...
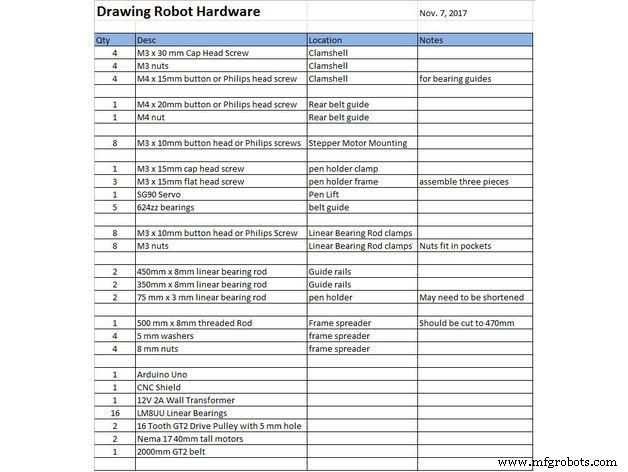
1단계:필요한 부품 및 재료

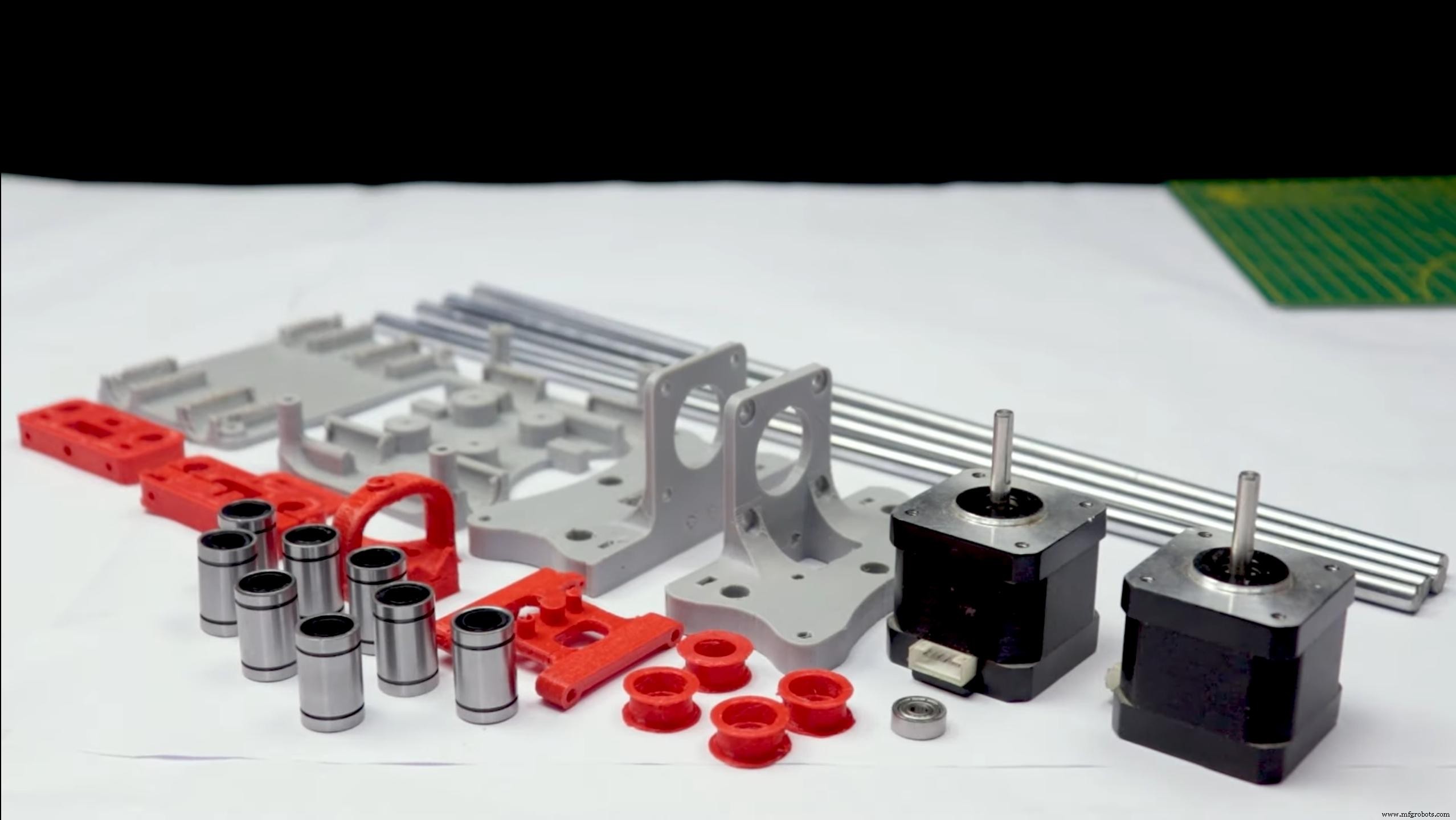
2 x Nema 17 스테퍼 모터 Amazon.com
X Axis Amazon.com용 선형 로드 M8 x 450mm 2개
Y축 Amazon.com용 선형 로드 M8 x 350mm 2개
Z축용 Linear Rod 3mm 2개(이전 CDROM에서 얻을 수 있음)
1 x 스레드 로드 M8 x 480mm8 x LM8UU 베어링 Amazon.com
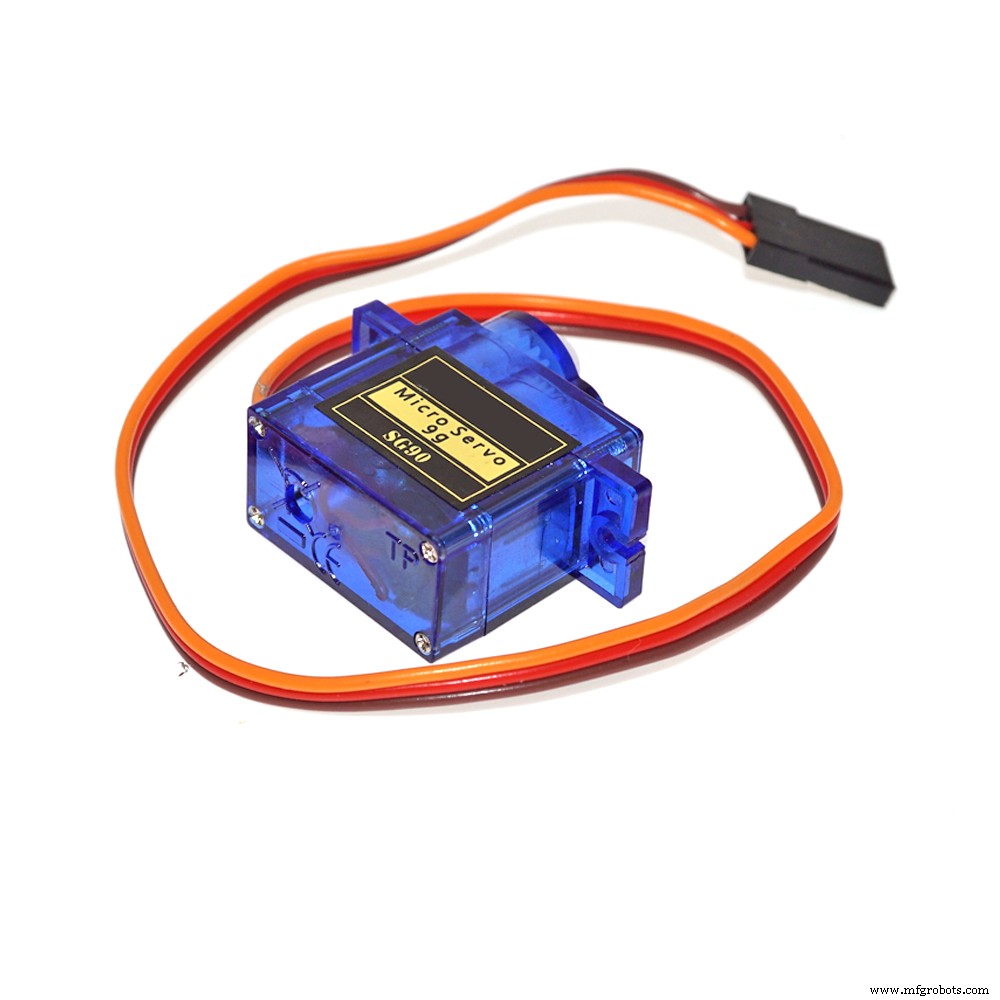
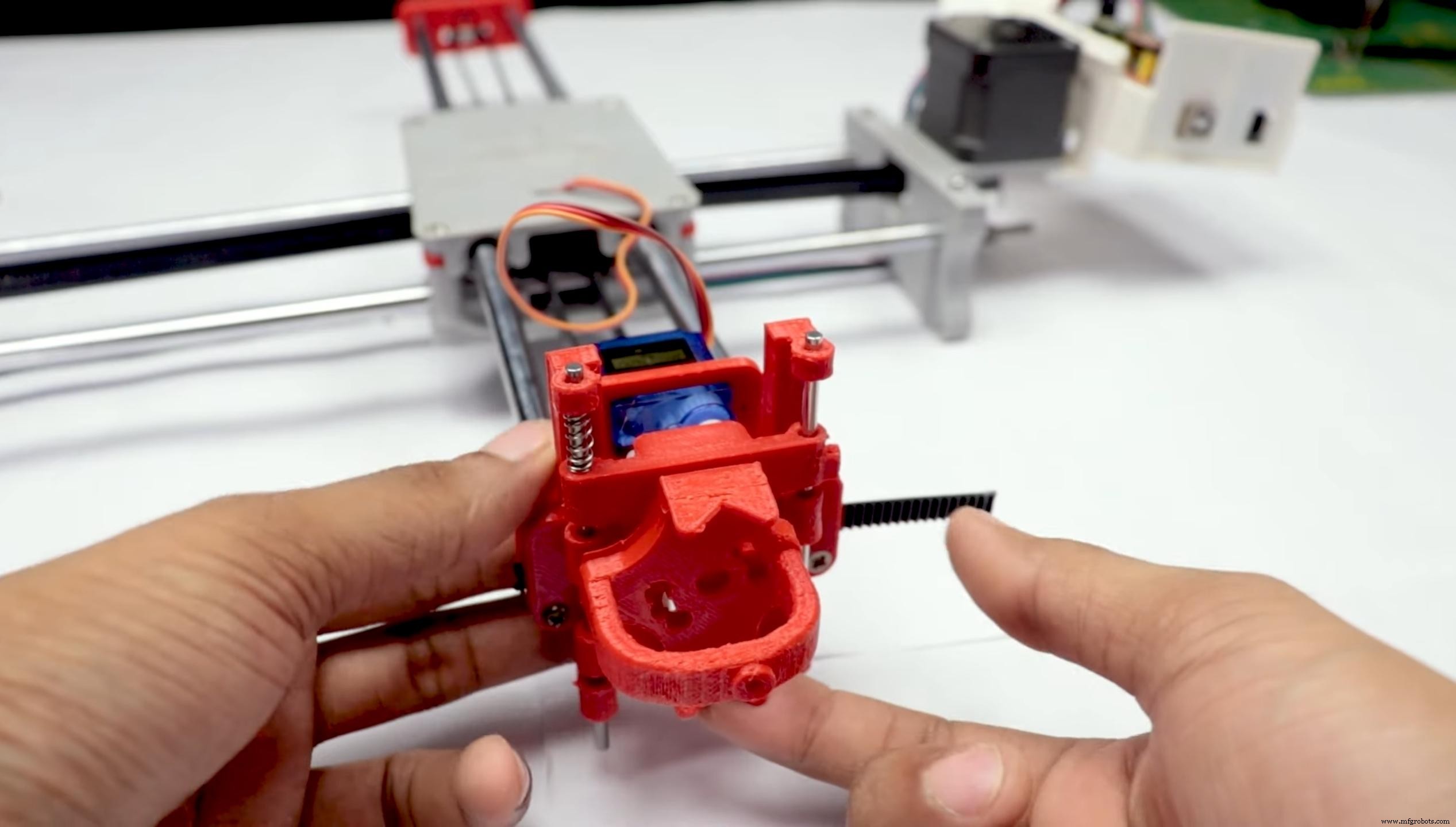
1 x 서보 Sg901 x 스프링 5m(볼펜에서) Amazon.com
2 x GT2 풀리, 16개 톱니 Amazon.com
5 x 베어링 624zz Amazon.com
1 x 2000mm GT2 벨트 Amazon.com
1 x Arduino Uno Amazon.com
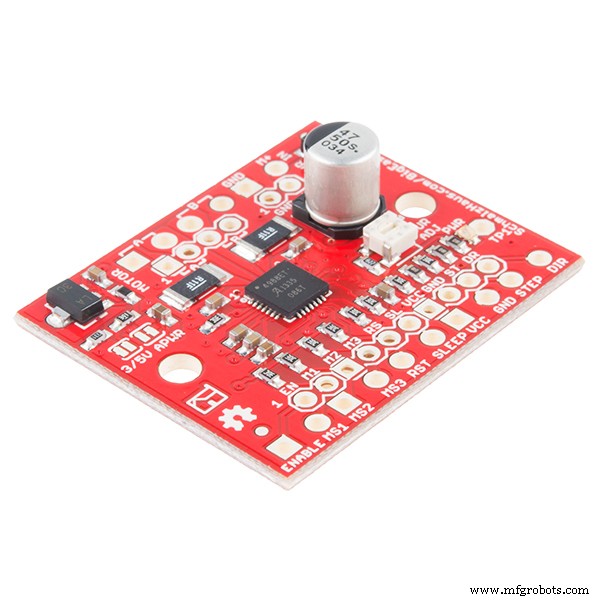
1 x CNC 쉴드 Amazon.com
방열판 포함 2 x A4988 스테퍼 드라이버 Amazon.com
6 x 점퍼 Amazon.com
1 x 12V 2A 전원 공급 장치 Amazon.com
견과류
<울>아마존
나사
<울>와셔
<울>
2단계:3D 프린팅

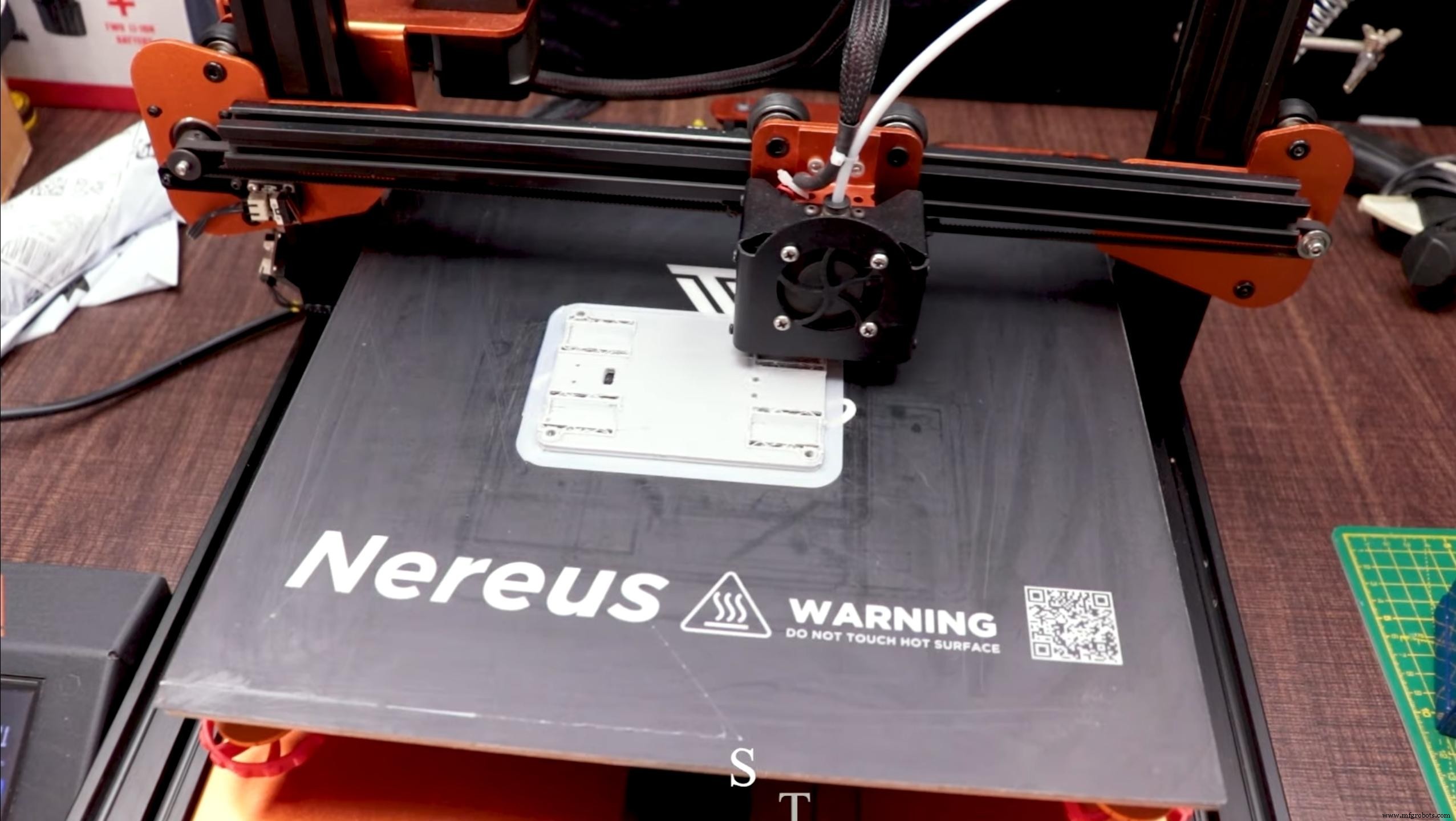
Thingiverse에서 파일 다운로드
Cura 또는 다른 슬라이서에서 3D 모델을 엽니다.
모든 부품에 75% 채우기 사용(70~100% 채우기도 효과가 있음)
0.10 – 0.20 mm 레이어 높이로 모든 부품 인쇄
PLA로 인쇄
Penholder, Slider, X_Support_L 및 X_Support_R에서 지지대 사용
참고:가장 긴 부분은 인쇄하는 데 약 10시간이 걸렸고 가장 짧은 부분은 인쇄하는 데 30분이 걸렸습니다.
PLA는 이 디자인에 적합합니다. BuildTak에서 200C로 인쇄합니다. 어떤 부품도 뗏목이나 챙이 필요하지 않습니다. 서있는 Z축 엔드플레이트와 펜홀더만을 위한 지지대를 제안합니다.
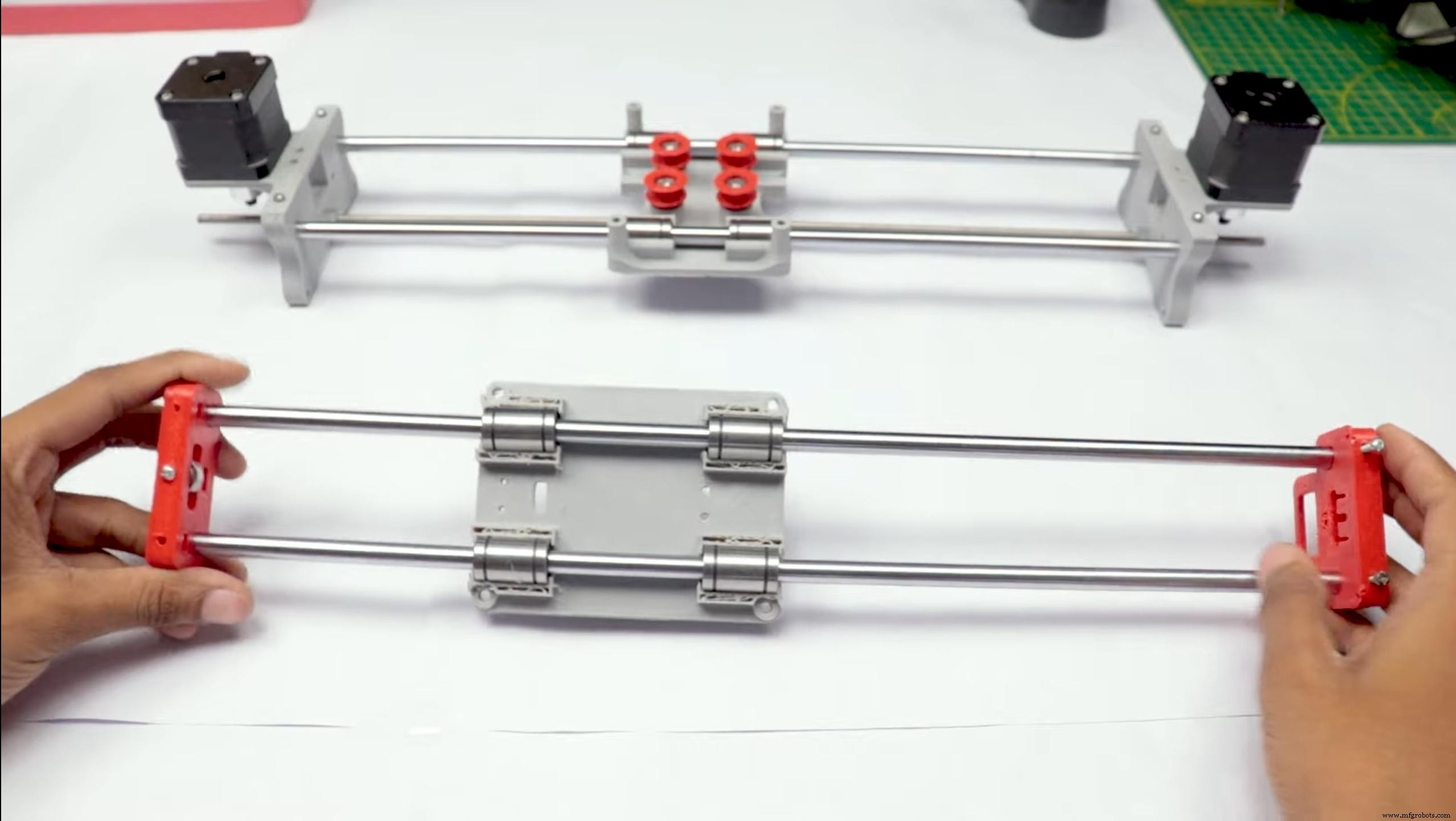
3단계:X축 조립
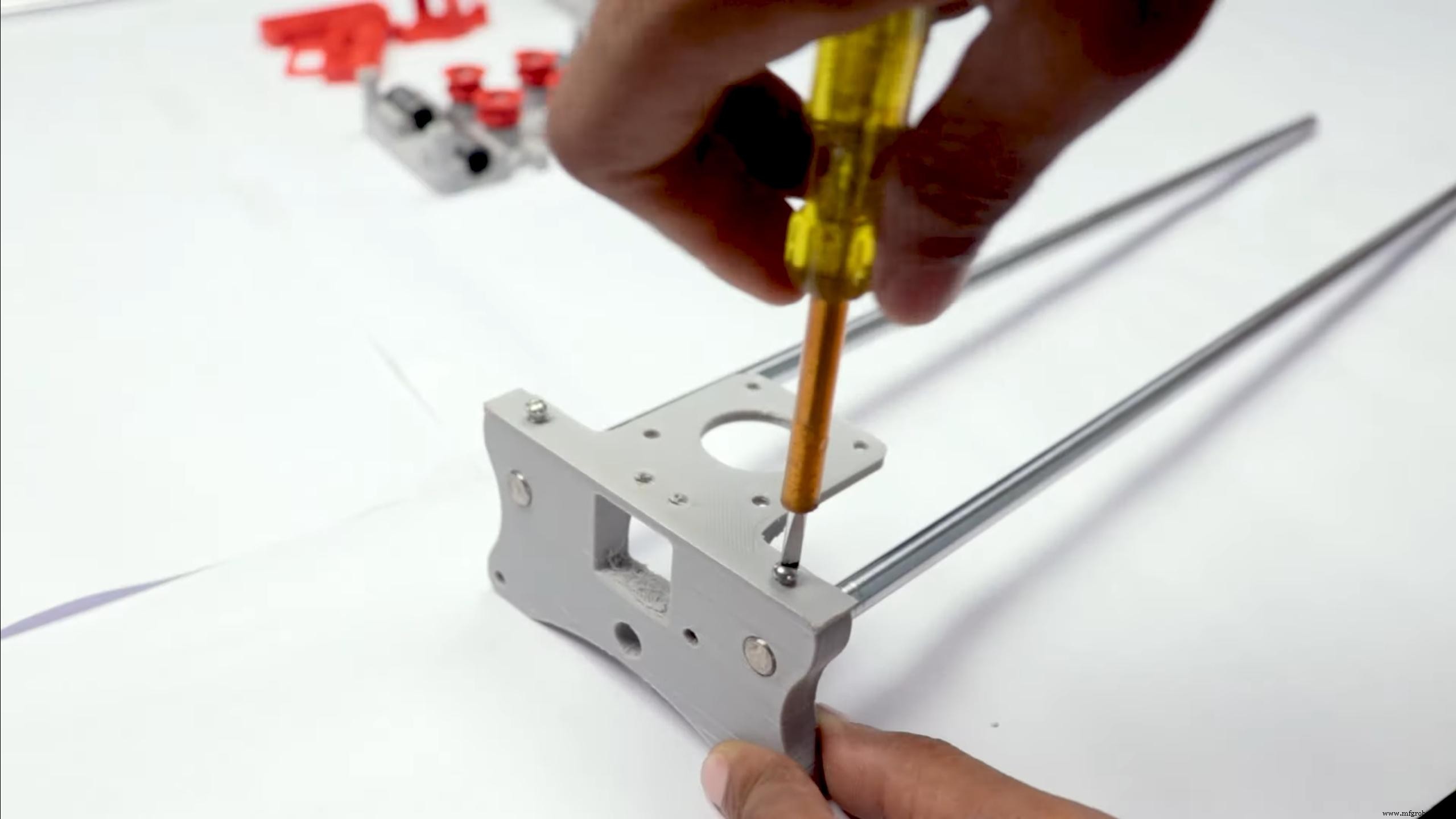
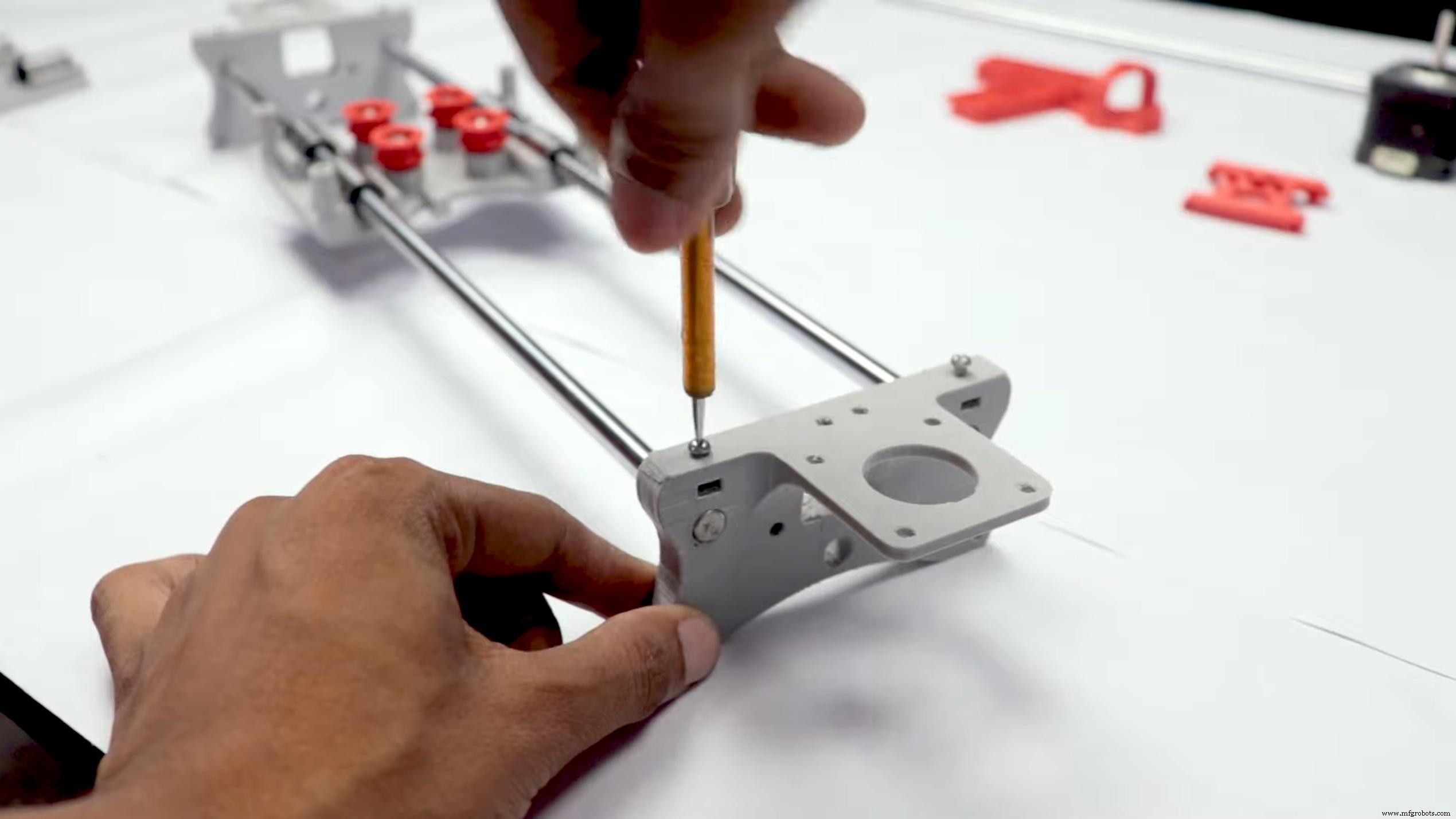
(2) 350mm 및 (2) 450mm 길이의 선형 막대가 필요함을 기억하십시오.
(2) 450mm 선형 막대를 x-지지 부분 중 하나에 삽입합니다.
<울>이제 나사 막대를 잡고 아래 구멍에 삽입하십시오. x 지지 부분의 양쪽에 5/16인치 와셔 및 5/16인치 너트 공급
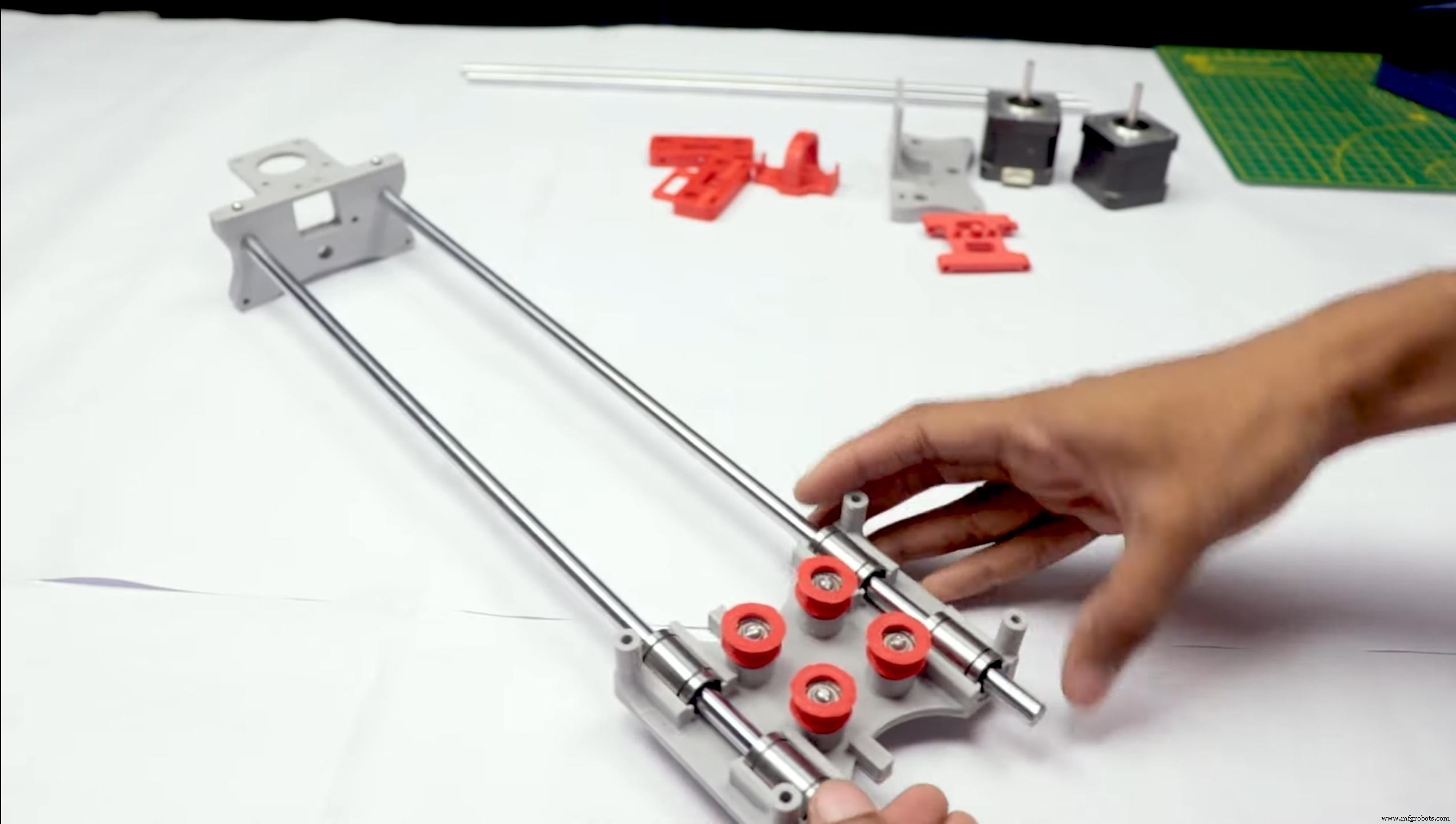
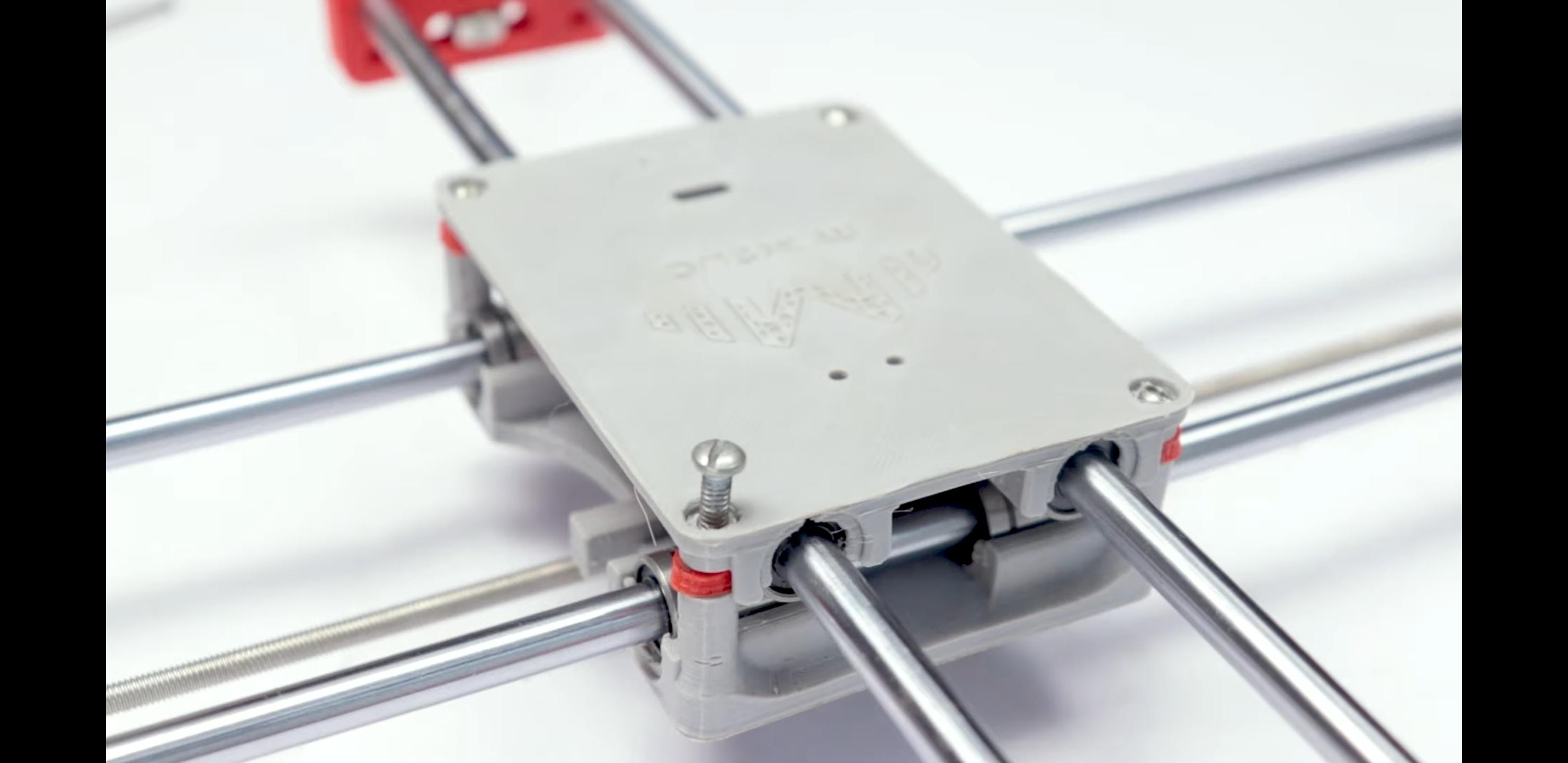
4단계:X축 베어링 조립


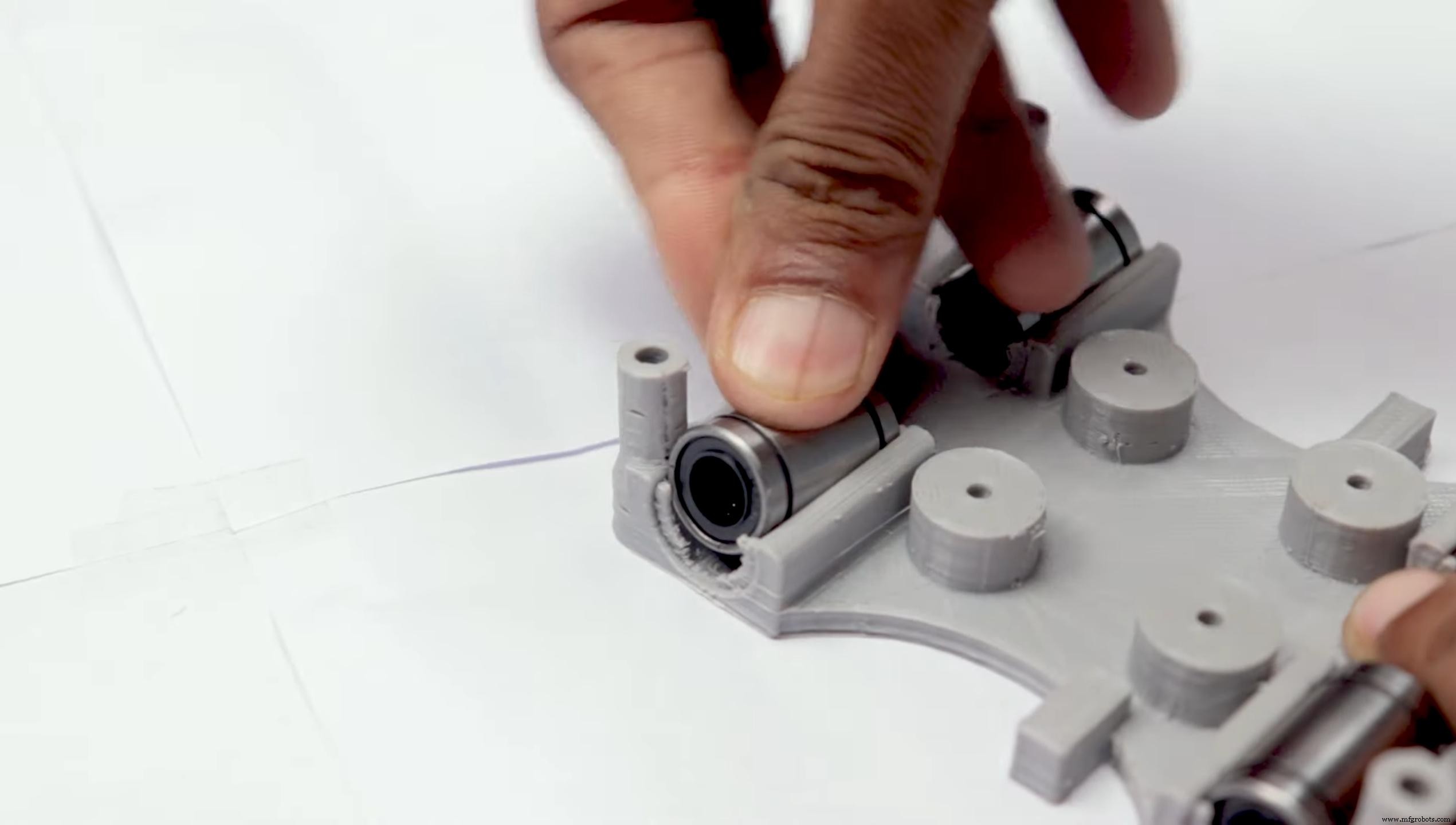


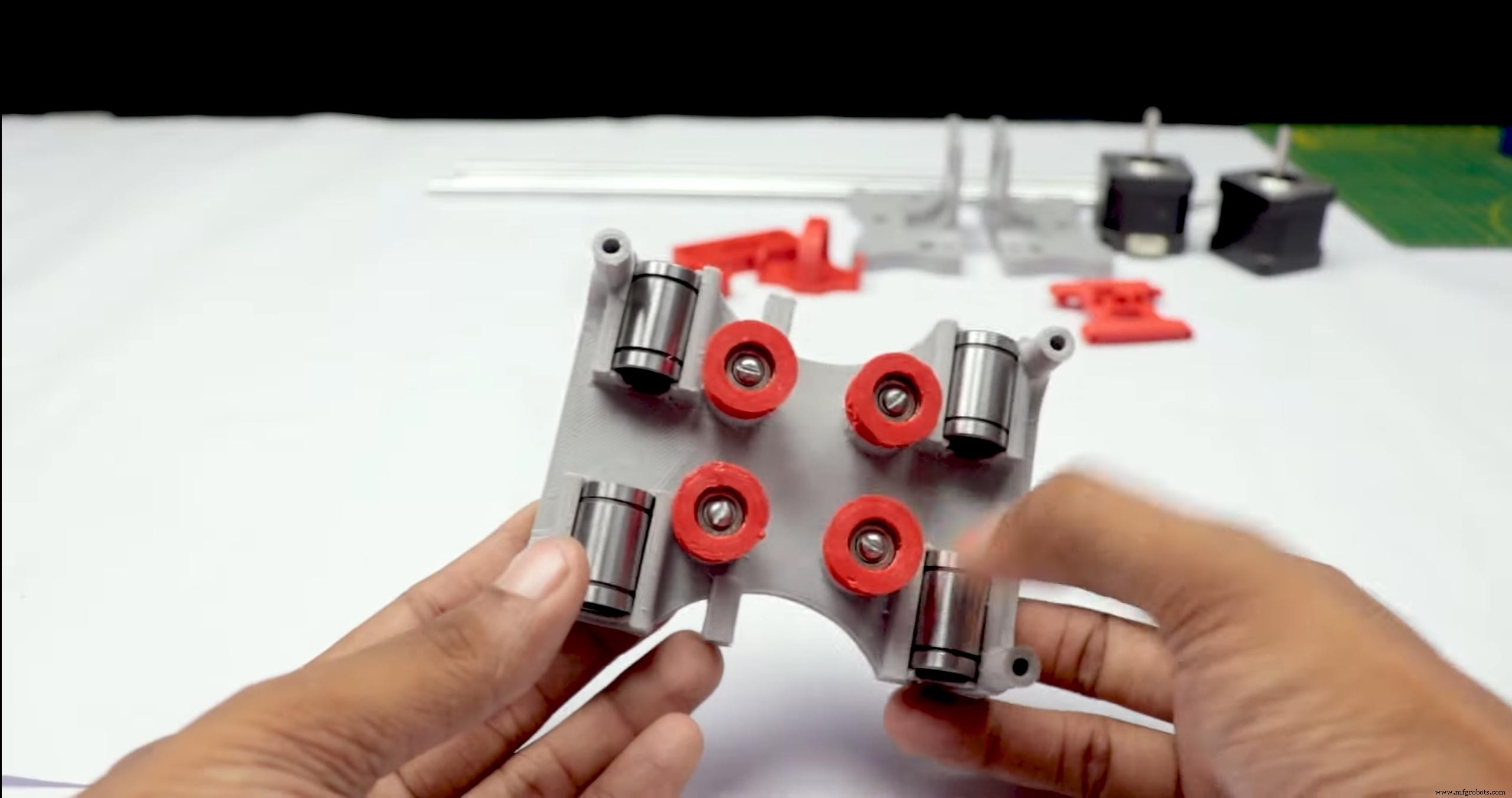
이제 LM8UU 베어링을 상단 및 하단 클램쉘의 제자리에 밀어 넣으려고 합니다(상단 및 하단 클램쉘은 각각 (4)개의 베어링을 사용합니다)
4개의 624zz 베어링을 3D 인쇄된 아이들러 풀리를 통해 밀어 넣습니다. 5번째 베어링은 나중에 Y축 조립시 남겨두세요
X축 조립(캐리지)
<울>X축 조립(X-Support)
<울>
5단계:Y축 조립
와이백
<울>Y 전면
<울>
6단계:X-Y 축(벨트) 조립
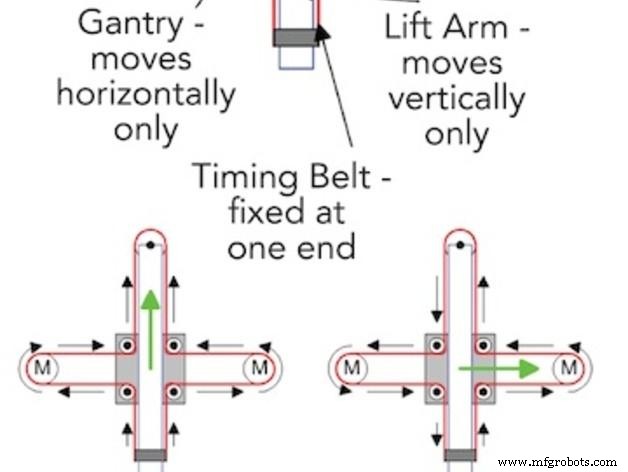
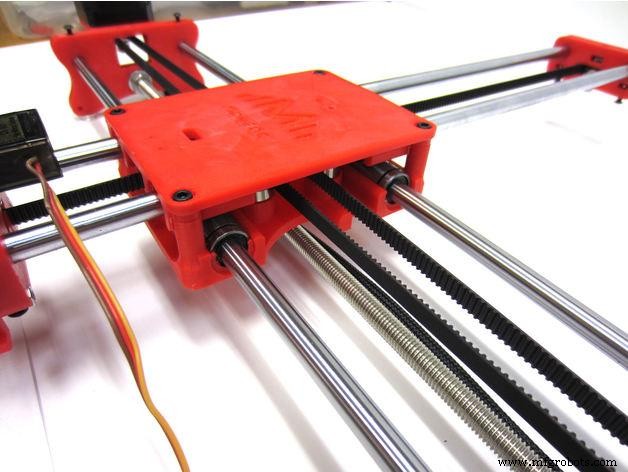
 <울>
<울>
7단계:Z축 조립

 <울>
<울>
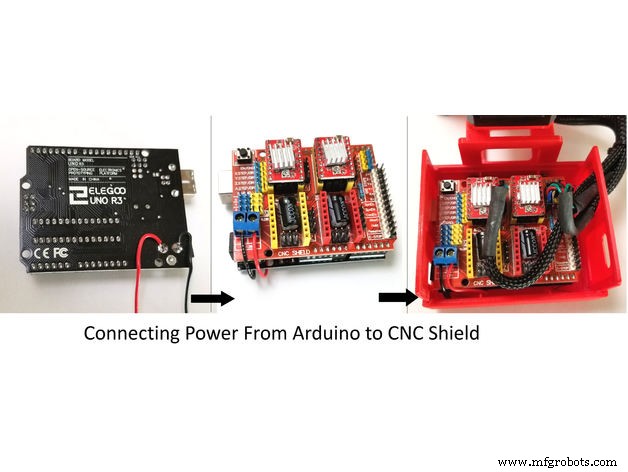
8단계:전자공학
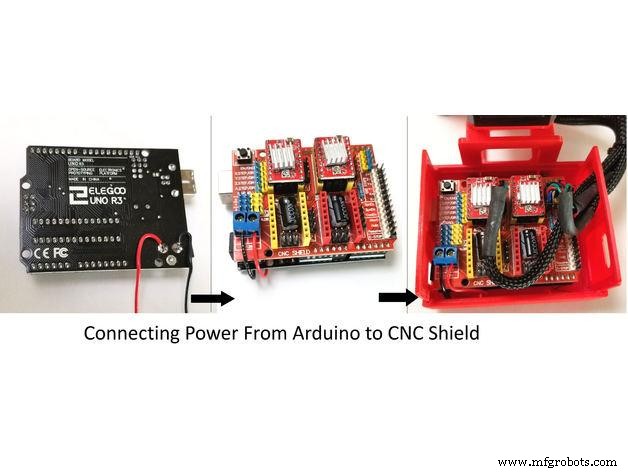

전자공학
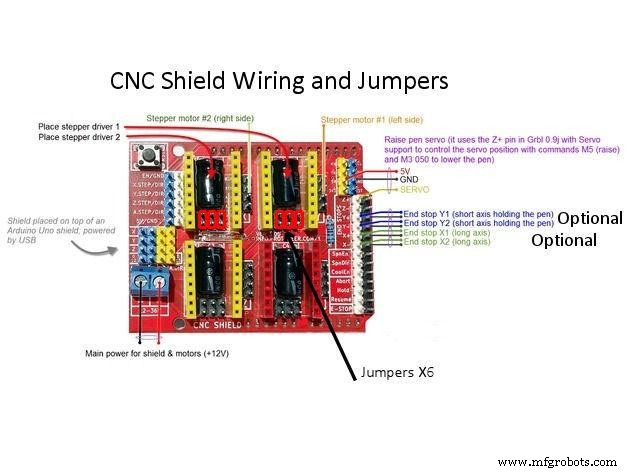
Arduino uno CNC Shield를 사용하는 것이 좋습니다.
모든 회로 준비
1) 4pcs A4988 스테퍼 모터 드라이버
2) 확장 보드 A4988 드라이버
3)Arduino UNO 먼저 히트 싱크를 잡고 A4988 모터 드라이버에 고정합니다.
4pcs A4988 스테퍼 모터 드라이버는 확장 보드 A4988 드라이버 모듈에 연결한 다음 arduino를 확장 보드와 연결하고 모든 배선을 연결합니다. 쉴드에는 마이크로 스테핑 컨트롤이 내장되어 있습니다. 즉, 대형 CNC와 같은 전체 단계 또는 절반 단계를 사용하는 대신 그렇게 하면 모터가 1/16 또는 1/32 단계로 이동하여 레이저가 최대한의 정밀도로 이동하도록 할 수 있습니다. 그러나 모터는 더 많은 전기를 소비하므로 더 빨리 뜨거워집니다.
마이크로 스테핑 모드를 사용하려면 일부 모드 핀을 함께 단락시키십시오. 다른 조합은 다른 해상도를 제공합니다. 가능한 다양한 구성에 대한 차트를 살펴보십시오. 쉴드가 프로그래밍되면 여기에 A4988 드라이버를 추가하고 나머지 전자 장치를 배선합니다.
스테퍼 모터의 코일을 찾으려면 멀티 미터를 사용하십시오. 두 전선 사이에 저항이 있으면 코일이 있습니다. 회로도에서 코일은 동일한 색상의 두 와이어로 표시됩니다.
9단계:소프트웨어
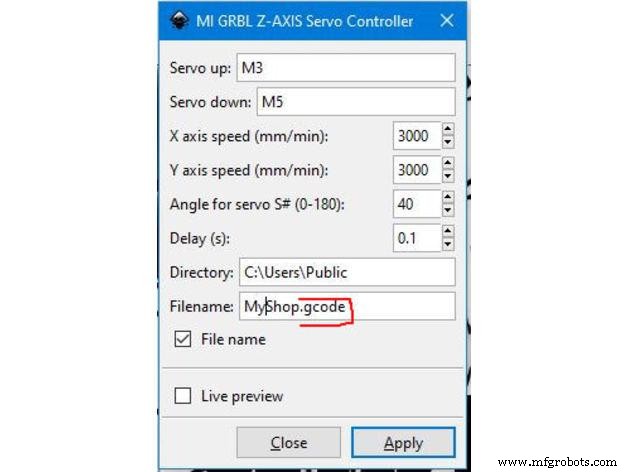
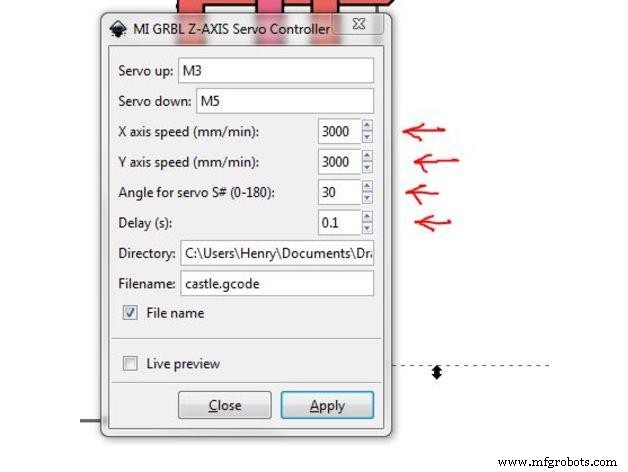
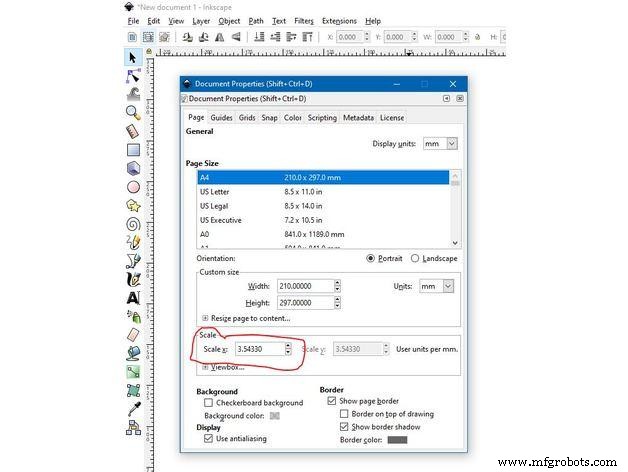
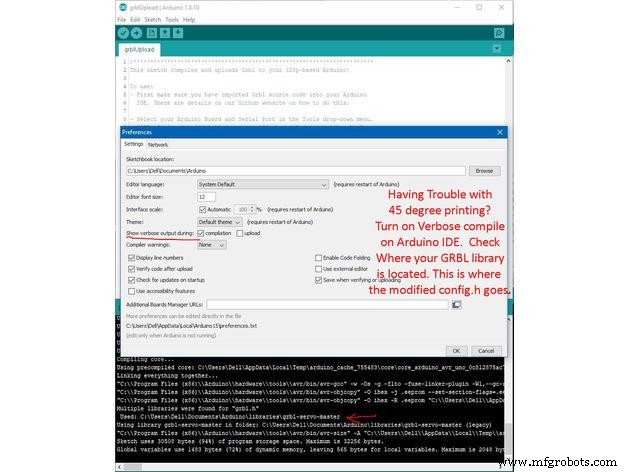
그래픽 디자인 소프트웨어인 Inkscape(그래픽 그리기 또는 가져오기)
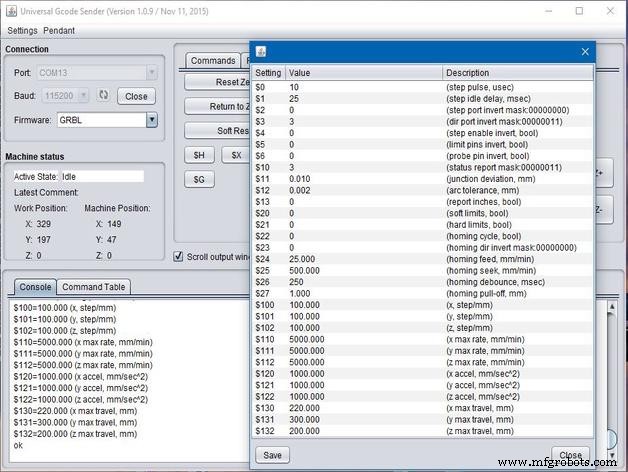
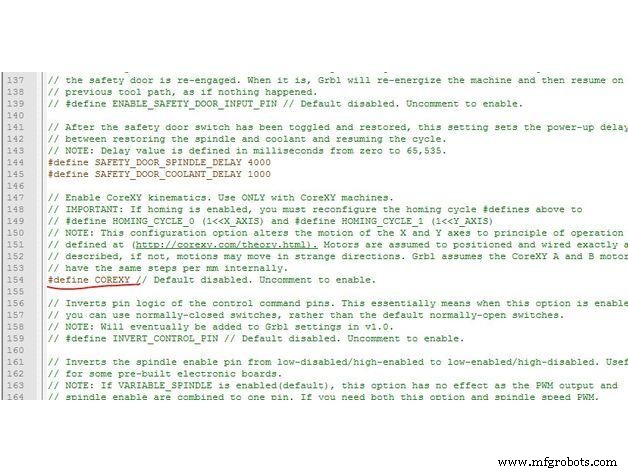
Inkscape MI GRBL 확장(그래픽을 G 코드로 변환) 범용 G 코드 전송기(G 코드를 로봇에 전송하여 그리기 동작을 유발) Arduino 펌웨어인 GRBL(Arduino Uno에 프로그래밍됨)
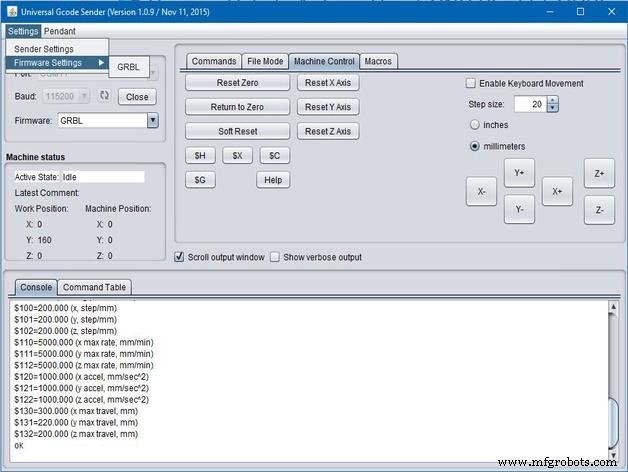
아두이노:https://www.arduino.cc/en/software
범용 G 코드 발신자:https://winder.github.io/ugs_website/...
잉크스케이프:https://inkscape.org/release/inkscape..
4xiDraw 및 km 레이저:https://drive.google.com/file/d/1YO8-...
처리:https://processing.org/download/
G 코드 처리로 그리기:https://drive.google.com/file/d/1PIFx...
전체 설정 동영상 보기
10단계:작업 중인 드로잉 머신
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
이 튜토리얼에서는 Arduino 기반 3D 와이어 벤딩 머신을 구축한 방법을 보여 드리겠습니다. 이것은 기계, 전기 및 컴퓨터 공학을 포함하기 때문에 실제로 일반적인 메카트로닉스 시스템입니다. 따라서 많은 엔지니어링 학생이나 메카트로닉스를 처음 접하는 사람이라면 누구나 이 프로젝트를 흥미롭게 여길 것입니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 이 3D 와이어 벤딩 머신의 작동 원리는 다음과 같습니다. 따라서 먼저 와이어가 시리즈 롤러 또는 스트레이트너를 통과합니다. 스테퍼 모터를 사용하여 와
이 프로젝트에서는 Arduino 기반 DIY 자판기를 만드는 방법을 배웁니다. MDF 기판을 자르고 조립하는 것부터 모든 전자 부품을 연결하고 Arduino 코드를 작성하는 것까지 만드는 전체 과정을 보여 드리겠습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 자판기는 4개의 연속 회전 서보 모터로 제어되는 4개의 배출 장치, 스테퍼 모터로 제어되는 캐리어 시스템, LCD, 품목 선택을 위한 4개의 버튼 및 동전 감지기로 구성되어 있습니다. 당신은 이제 아이템 캐리어가 이 자판기에 그다지 유