

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
이 매우 간단한 계획을 사용하면 일정에 맞춰 기차를 빠르게 탈 수 있습니다. 이동 시간과 열차 정차 시간을 조정할 수 있습니다. 열차 가속 및 제동도 구성할 수 있습니다. 스케치에서 일정 매개변수를 변경하여 모든 유형의 자동 이동을 생성할 수 있습니다. 전원을 켜기만 하면 열차가 출발합니다.
스케치에서 시간 매개변수 변경:
<사전><코드>// 1 | 0> 시간 <5초 (counterScheduler <=5) { ......// 2 | 10초> 시간 <15초 ((counterScheduler>=10) &&(counterScheduler <=15)) { ......// 3 | 방향 변경if (counterScheduler ==16) {.... 등시간표를 생성합니다.
변수:
int 제동Delta =5; 정수 가속델타 =6; 기차 이동 매개변수 정의
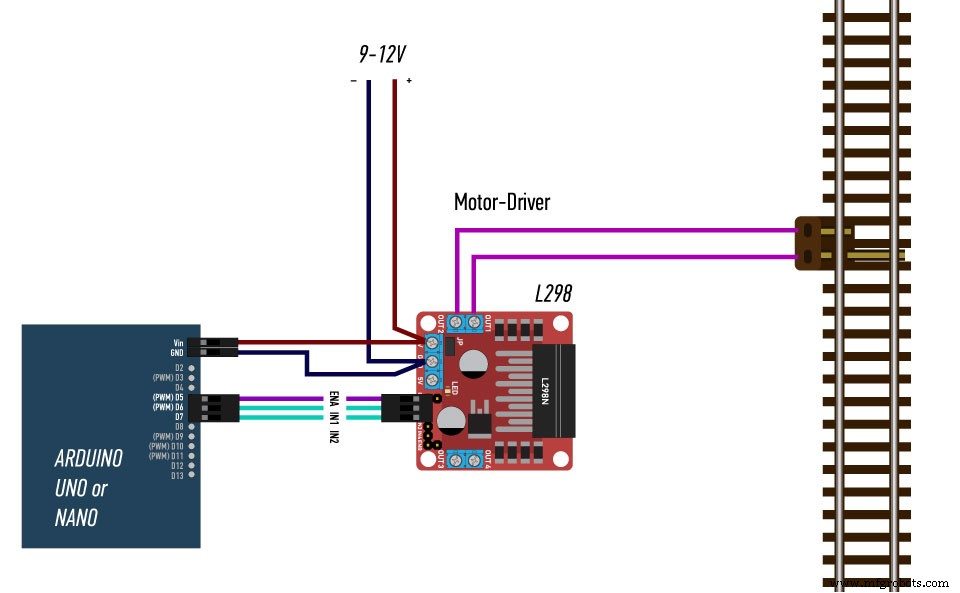
기차의 방향은 핀 D6 및 D7의 상태에 따라 결정됩니다.
// 기본 방향을 FORWARD digitalWrite(L298_IN1, HIGH)로 설정합니다. 디지털 쓰기(L298_IN2, LOW); 이 스케치를 끝없이 변경하여 자동 기차 이동에 대한 새로운 옵션을 얻을 수 있습니다.
탑승을 환영합니다!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">// L298 #define L298_ENA 5#define L298_IN1 6#define L298_IN2 7// SCRIPTS VARIABLESint counterScheduler;unsigned long timerScheduler =0;unsigned long timerLocal =0;byte speedAuto =0/void setup() 핀모드(L298_ENA, 출력); 핀모드(L298_IN1, 출력); pinMode(L298_IN2, OUTPUT);// 기본 방향을 FORWARD로 설정 digitalWrite(L298_IN1, HIGH); 디지털 쓰기(L298_IN2, LOW); }void loop() { // 스케줄러 시작 if (millis()> (timerScheduler + 1000)) { // 1초마다 틱 counterScheduler++; timerScheduler =millis(); } // ------------- SCRIPT SWING int 제동Delta =5; 정수 가속델타 =6; // 1 | 0> 시간 <5초 if (counterScheduler <=5) { // 기차 시작 if (millis()> (timerLocal + 100)) { if (speedAuto <240) speedAuto =speedAuto + 가속델타; 그렇지 않으면 속도 자동 =255; analogWrite(L298_ENA, speedAuto); timerLocal =밀리(); } } // 2 | 10초> 시간 <15초 if ((counterScheduler>=10) &&(counterScheduler <=15)) { // 10초 후 열차 정지 // 열차 정지 if (millis()> (timerLocal + 100)) { if ( speedAuto> 30) speedAuto =speedAuto - 제동Delta; 그렇지 않으면 속도 자동 =0; analogWrite(L298_ENA, speedAuto); timerLocal =밀리(); } } // 3 | 방향 변경 if (counterScheduler ==16) { digitalWrite(L298_IN1, LOW); 디지털 쓰기(L298_IN2, 높음); } // 4 | 20초> 시간 <30초 if ((counterScheduler>=20) &&(counterScheduler <=30)) { // 기차 시작 if (millis()> (timerLocal + 100)) { if (speedAuto <240) speedAuto =speedAuto + 가속델타; 그렇지 않으면 속도 자동 =255; analogWrite(L298_ENA, speedAuto); timerLocal =밀리(); } } // 5 | 31초> 시간 <40초 if ((counterScheduler>=31) &&(counterScheduler <=40)) { // 기차 중지 // 기차 중지 if (millis()> (timerLocal + 100)) { if (speedAuto> 30 ) speedAuto =speedAuto - 제동델타; 그렇지 않으면 속도 자동 =0; analogWrite(L298_ENA, speedAuto); timerLocal =밀리(); } } // 6 | if (counterScheduler> 40) { counterScheduler =0; 디지털 쓰기(L298_IN1, 높음); 디지털 쓰기(L298_IN2, LOW); }} 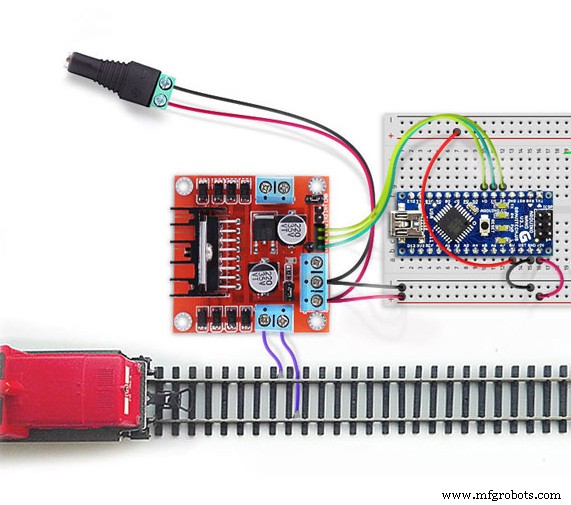
제조공정
Arduino 및 초음파 센서를 사용한 고속 자동 철도 게이트 컨트롤러 회로 이 튜토리얼에서는 간단하고 효율적인 자동 고속 철도 게이트 컨트롤러 시스템을 설계하는 방법을 배웁니다. 이것은 이 프로젝트에 대한 비교적 간단한 접근 방식이지만 이를 기본 빌딩 블록으로 사용할 수 있으며 추가 수정을 통해 기차가 지나가는 속도 등을 추적할 수도 있습니다. 하지만 튜토리얼로 바로 넘어가기 전에 자동화가 무엇이고 자동화에서 정확히 무엇을 기대할 수 있는지에 대한 아이디어를 얻어야 합니다. 자동화는 기본적으로 인간의 노력/개입을 줄이거나 제거하
재고 관리의 정의 재고 관리라고도 하는 재고 관리는 너무 광범위하고 많은 기능을 통합하여 제한된 정의로 설명하기 어렵지만 이 Inc.com 항목이 말하는 방식이 좋습니다. 재고 관리는 회사 재고 관리의 모든 측면:구매, 배송, 수령, 추적, 창고 보관 및 보관, 회전율, 재주문. 재고 관리는 조직의 운영 및 수익에서 매우 중요한 부분이므로 인적 오류나 구식 시스템에 맡기는 것이 너무 중요합니다. 그렇기 때문에 많은 기업이 재고 관리 시스템에 투자하여 재고 관리의 모든 구성 요소를 하나의 통합 시스템에서 관리하도록 선택합니다.재고