

제조공정

산업 제조
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 |
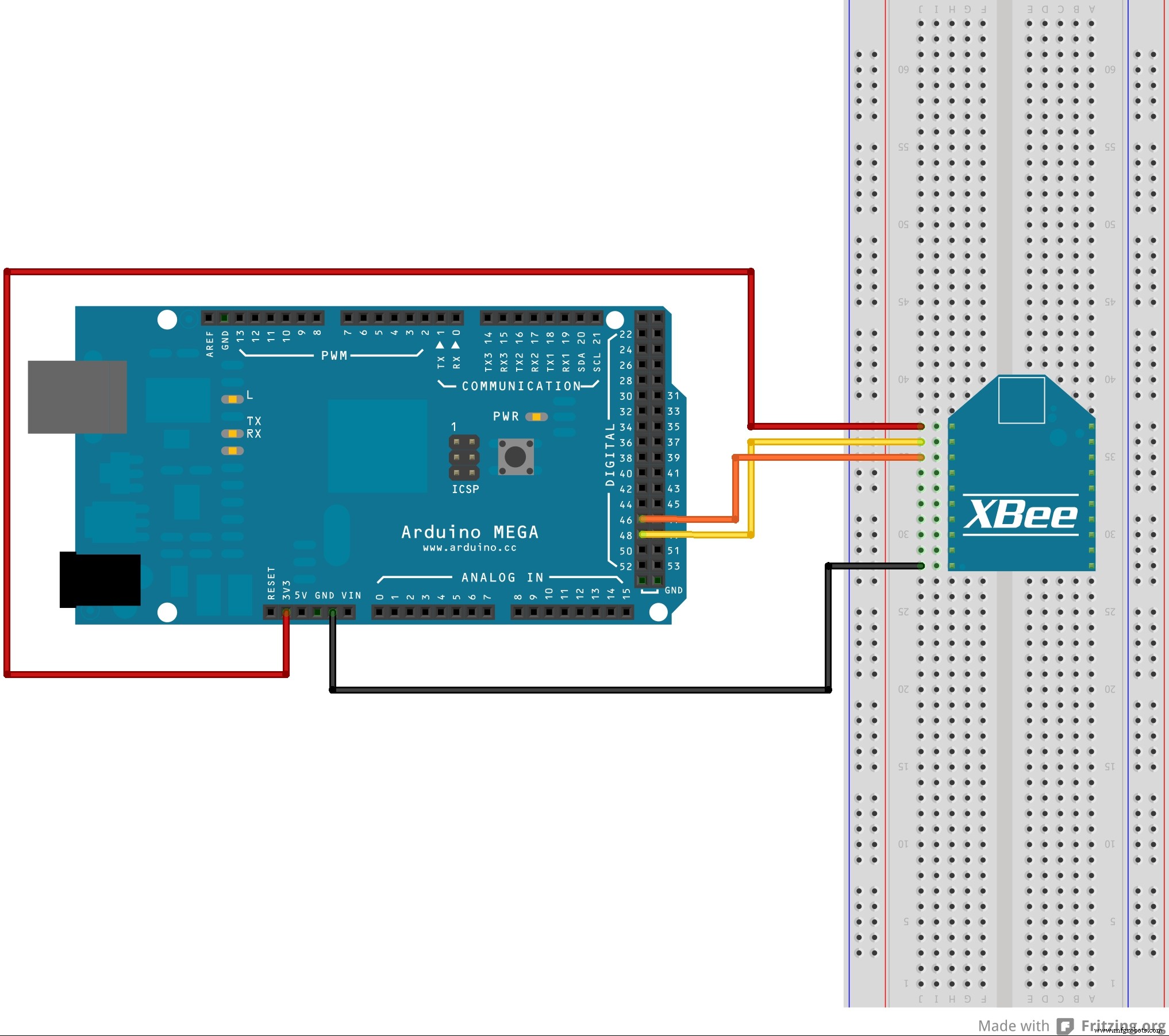
우리의 프로젝트는 가속도계 센서, GPS 위치, 소음 드론, 방향, 자이로스코프 등 스마트폰에 의해 기록되고 실시간으로 PC로 전송되는 다양한 비행 데이터의 제어를 봅니다.
우리는 데이터 제어를 위해 두 개의 Arduino를 사용합니다. 하나는 드론에, 다른 하나는 컴퓨터에, 두 개의 xBee를 사용하여 1쉴드의 원격 데이터를 PC와 통신합니다.
스마트폰의 모든 기능과 센서를 활용하고 멋진 사진을 찍을 수 있는 재미있고 쉬운 방법;)
#includeint verifica=0;AltSoftSerial xBee;char c;char h;char stop='s 라이브러리를 다운로드해야 합니다. '; 무효 설정() { Serial.begin(115200); Serial.println("마스터 확인"); 직렬.println(); Serial.println("숫자:"); Serial.println("'o' 방향 센서 값"); Serial.println("'a' 가속도 센서 값"); Serial.println("'b' 밝기 센서 값"); Serial.println("'g' GPS 위치"); Serial.println("''마이크로폰 노이즈"); Serial.println("'p' 사진을 찍습니다."); xBee.begin(9600);} 무효 루프() { Serial.flush(); if (Serial.available()>0) { c =Serial.read(); if(c=='o'||c=='a'||c=='m'||c=='g'||c=='b'||c=='p'){ //----------방향-------------------------------------- ---- if(c=='o'){ Serial.println("방향"); c='1'; xBee.print(c); for(int i=0; i<10;i++){지연(20); c='오'; xBee.print(c); 하세요{ h=0; h=xBee.read(); Serial.print(h); } 동안(xBee.available()>0); 지연(100); i=i-1; if(Serial.available()>0); if(stop==Serial.read()){ Serial.println("분석 중지됨"); c='0'; 직렬.println(); Serial.println("숫자:"); Serial.println("'o' 방향 센서 값"); Serial.println("'a' 가속도 센서 값"); Serial.println("'b' 밝기 센서 값"); Serial.println("'g' GPS 위치"); Serial.println("''마이크로폰 노이즈"); Serial.println("'p' 사진을 찍습니다."); xBee.print(c); 나는 =11; } } } //----------가속 ---------------------------------- ------- if(c=='a'){ Serial.println("가속"); c='2'; xBee.print(c); for(int i=0; i<10;i++){지연(20); c='아'; xBee.print(c); 하세요{ h=0; h=xBee.read(); Serial.print(h); } 동안(xBee.available()>0); 지연(100); i=i-1; if(Serial.available()>0); if(stop==Serial.read()){ Serial.println("분석 중지됨"); c='0'; 직렬.println(); Serial.println("숫자:"); Serial.println("'o' 방향 센서 값"); Serial.println("'a' 가속도 센서 값"); Serial.println("'b' 밝기 센서 값"); Serial.println("'g' GPS 위치"); Serial.println("''마이크로폰 노이즈"); Serial.println("'p' 사진을 찍습니다."); xBee.print(c); 나는 =11; } } } //----------밝기----------------------------------- ------ if(c=='b'){ Serial.println("밝기"); c='3'; xBee.print(c); for(int i=0; i<10;i++){지연(20); c='b'; xBee.print(c); 하세요{ h=0; h=xBee.read(); Serial.print(h); } 동안(xBee.available()>0); 지연(50); i=i-1; if(Serial.available()>0); if(stop==Serial.read()){ Serial.println("분석 중지됨"); c='0'; 직렬.println(); Serial.println("숫자:"); Serial.println("'o' 방향 센서 값"); Serial.println("'a' 가속도 센서 값"); Serial.println("'b' 밝기 센서 값"); Serial.println("'g' GPS 위치"); Serial.println("''마이크로폰 노이즈"); Serial.println("'p' 사진을 찍습니다."); xBee.print(c); 나는 =11; } } } //----------GPS---------------------------------- ------- if(c=='g'){ Serial.println("GPS 위치'"); c='4'; xBee.print(c); for(int i=0; i<10;i++){지연(20); c='g'; xBee.print(c); 하세요{ h=0; h=xBee.read(); Serial.print(h); } 동안(xBee.available()>0); 지연(500); i=i-1; if(Serial.available()>0); if(stop==Serial.read()){ Serial.println("분석 중지됨"); c='0'; 직렬.println(); Serial.println("숫자:"); Serial.println("'o' 방향 센서 값"); Serial.println("'a' 가속도 센서 값"); Serial.println("'b' 밝기 센서 값"); Serial.println("'g' GPS 위치"); Serial.println("''마이크로폰 노이즈"); Serial.println("'p' 사진을 찍습니다."); xBee.print(c); 나는 =11; } } } //----------마이크로포노----------------------------------- ------- if(c=='m'){ Serial.println("마이크"); c='5'; xBee.print(c); for(int i=0; i<10;i++){지연(20); c=''; xBee.print(c); 하세요{ h=0; h=xBee.read(); Serial.print(h); } 동안(xBee.available()>0); 지연(100); i=i-1; if(Serial.available()>0); if(stop==Serial.read()){ Serial.println("분석 중지됨"); c='0'; 직렬.println(); Serial.println("숫자:"); Serial.println("'o' 방향 센서 값"); Serial.println("'a' 가속도 센서 값"); Serial.println("'b' 밝기 센서 값"); Serial.println("'g' GPS 위치"); Serial.println("''마이크로폰 노이즈"); Serial.println("'p' 사진을 찍습니다."); xBee.print(c); 나는 =11; } } } //----------사진----------------------------------- ------- if(c=='p'){ Serial.println("사진 찍기"); c='6'; xBee.print(c); 지연(20); c='p'; 직렬.println(); Serial.println("숫자:"); Serial.println("'o' 방향 센서 값"); Serial.println("'a' 가속도 센서 값"); Serial.println("'b' 밝기 센서 값"); Serial.println("'g' GPS 위치"); Serial.println("''마이크로폰 노이즈"); Serial.println("'p' 사진을 찍습니다."); xBee.print(c); } } }}
#include#include char variabile;AltSoftSerial xBee;char master;int voce=0;void setup(){ Serial.begin (115200); Serial.println("슬레이브 확인"); OneSheeld.begin(); xBee.begin(9600);}무효 루프(){receiveEvent(); requestEvent();}receiveEvent(){ while(xBee.available()>0){ master=xBee.read(); 변수=마스터; }} 무효 requestEvent(){ if(variabile=='o'){ xBee.print("Asse x:"); xBee.print(OrientationSensor.getX()); xBee.print(" y 평가:"); xBee.print(OrientationSensor.getY()); xBee.print(" z 평가:"); xBee.println(OrientationSensor.getZ()); 변수=0; } if(변수=='a'){ xBee.print("X 평가:"); xBee.print(가속도계센서.getX()); xBee.print(" y 평가:"); xBee.print(가속도계센서.getX()); xBee.print(" z 평가:"); xBee.println(가속도계센서.getX()); 변수=0; } if(변수=='g'){ xBee.print("경도:"); xBee.print(GPS.getLongitude()); xBee.print(" 위도;:"); xBee.println(GPS.getLatitude()); 변수=0; } if(변수=='m'){ xBee.print("db:"); xBee.println(Mic.getValue()); 변수=0; } if(변수=='b'){ xBee.print("루멘:"); xBee.println(LightSensor.getValue()); 변수=0; } if(변수=='p'){ 카메라.setFlash(ON); Camera.rearCapture(); xBee.println("촬영한 사진"); 변수=0; } if(variabile=='1'){ TextToSpeech.say("분석 방향"); 변수=0; } if(variabile=='2'){ TextToSpeech.say("분석 가속"); 변수=0; } if(variabile=='3'){ TextToSpeech.say("분석 밝기 강도"); 변수=0; } if(variabile=='4'){ TextToSpeech.say("GPS 위치 분석"); 변수=0; } if(variabile=='5'){ TextToSpeech.say("데시벨 노이즈 분석"); 변수=0; } if(variabile=='6'){ TextToSpeech.say("사진 찍기"); 변수=0; } if(variabile=='0'){ TextToSpeech.say("분석 중지됨"); 변수=0; }}
제조공정
프로토타입을 빠르게 구축할 수 있는 방법을 찾고 계십니까? 아니면 새로운 프로젝트를 시도할 개발 보드를 찾고 계십니까? 그렇다면 STM32 Nucleo 개발 보드가 필요합니다. SMT32 Nucleo는 개발자를 위한 여러 확장 기능, 저전력 소비 및 기타 기능을 제공합니다. 그러나 STM32 Nucleo는 어떻게 작동합니까? 이 기사에서는 STM32 Nucleo, Arduino IDE와 함께 사용하는 방법 등에 대한 모든 것을 배울 것입니다. 시작합니다! STM32 Nucleo 보드란 무엇입니까? STM32 보드 핀아웃
제품 아이디어를 현실로 만들고자 하는 제품 디자이너입니까, 아니면 제조하고 싶은 부품이 있습니까? 그렇다면 부품을 정확하고 정밀하게 만들기 위해 제조 기술을 선택하려고 할 것입니다. 컴퓨터 수치 제어(CNC) 기계는 이러한 모든 요구 사항 이상을 충족합니다. 이 기계는 간단하고 복잡한 부품을 정확하고 정확하게 만들 수 있을 뿐만 아니라 빠르고 비용 효율적입니다. 그러나 여러 유형의 CNC 기계가 있으며 각각 고유한 디자인과 다양한 부품 기능을 생성하는 데 적합합니다. 이 기사에서는 제조 산업에서 가장 일반적인 10가지 유형의 C