

verilog

산업 제조
클록은 서로 다른 블록이 서로 동기화될 수 있도록 하므로 디지털 회로를 구축하는 데 기본입니다.
디지털 시계의 주요 속성은 주파수입니다. 시계 주기를 결정합니다. , 듀티 사이클 및 시계 단계 다른 시계와 관련하여.
빈도는 특정 기간에 몇 개의 사이클을 찾을 수 있는지 나타냅니다. 따라서 시계 주기는 1주기를 완료하는 데 걸리는 시간입니다.
<노스크립트>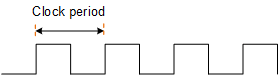
클록이 해당 기간에 비해 높은 시간이 듀티 사이클을 정의합니다.
<노스크립트>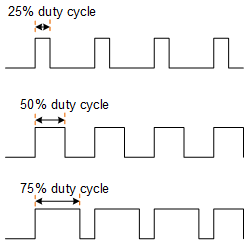
시계의 한 주기를 360도의 완전한 원으로 볼 수 있다면 다른 시계는 다른 위상을 차지하는 원의 다른 위치에 상대적으로 배치할 수 있습니다. 예를 들어, 같은 주기의 다른 클록이 그 주기의 1/4만큼 오른쪽으로 이동하면 위상차가 90도라고 할 수 있습니다.
<노스크립트>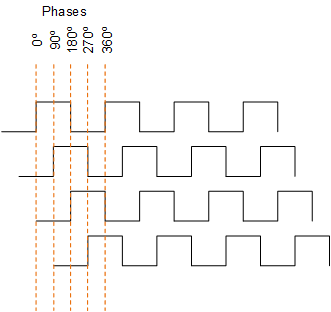
timescale 지시문에 지정된 대로 제한된 정밀도를 갖는 주어진 시간 척도에서 작동하려면 시뮬레이션이 필요합니다. 따라서 시간 척도의 정밀도가 클록 주기를 나타낼 만큼 충분히 좋은 것이 중요합니다. 예를 들어, 클록의 주파수가 640000kHz로 설정되면 클록 주기는 1.5625ns가 되며, 표시할 추가 포인트가 있기 때문에 1ps의 시간 척도 정밀도로는 충분하지 않습니다. 따라서 시뮬레이션은 마지막 숫자를 반올림하여 3포인트 시간 척도 정밀도에 맞춥니다. 이것은 실제로 639795kHz를 나타내는 1.563으로 클록 주기를 증가시킬 것입니다!
다음 Verilog 클록 생성기 모듈에는 위에서 설명한 세 가지 다른 속성을 조정하는 세 가지 매개변수가 있습니다. 모듈에는 필요에 따라 클록을 비활성화 및 활성화할 수 있는 입력 활성화가 있습니다. 여러 클록이 공통 인에이블 신호로 제어되는 경우 상대적으로 쉽게 위상을 조정할 수 있습니다.
`timescale 1ns/1ps
module clock_gen ( input enable,
output reg clk);
parameter FREQ = 100000; // in kHZ
parameter PHASE = 0; // in degrees
parameter DUTY = 50; // in percentage
real clk_pd = 1.0/(FREQ * 1e3) * 1e9; // convert to ns
real clk_on = DUTY/100.0 * clk_pd;
real clk_off = (100.0 - DUTY)/100.0 * clk_pd;
real quarter = clk_pd/4;
real start_dly = quarter * PHASE/90;
reg start_clk;
initial begin
$display("FREQ = %0d kHz", FREQ);
$display("PHASE = %0d deg", PHASE);
$display("DUTY = %0d %%", DUTY);
$display("PERIOD = %0.3f ns", clk_pd);
$display("CLK_ON = %0.3f ns", clk_on);
$display("CLK_OFF = %0.3f ns", clk_off);
$display("QUARTER = %0.3f ns", quarter);
$display("START_DLY = %0.3f ns", start_dly);
end
// Initialize variables to zero
initial begin
clk <= 0;
start_clk <= 0;
end
// When clock is enabled, delay driving the clock to one in order
// to achieve the phase effect. start_dly is configured to the
// correct delay for the configured phase. When enable is 0,
// allow enough time to complete the current clock period
always @ (posedge enable or negedge enable) begin
if (enable) begin
#(start_dly) start_clk = 1;
end else begin
#(start_dly) start_clk = 0;
end
end
// Achieve duty cycle by a skewed clock on/off time and let this
// run as long as the clocks are turned on.
always @(posedge start_clk) begin
if (start_clk) begin
clk = 1;
while (start_clk) begin
#(clk_on) clk = 0;
#(clk_off) clk = 1;
end
clk = 0;
end
end
endmodule
module tb;
wire clk1;
wire clk2;
wire clk3;
wire clk4;
reg enable;
reg [7:0] dly;
clock_gen u0(enable, clk1);
clock_gen #(.FREQ(200000)) u1(enable, clk2);
clock_gen #(.FREQ(400000)) u2(enable, clk3);
clock_gen #(.FREQ(800000)) u3(enable, clk4);
initial begin
enable <= 0;
for (int i = 0; i < 10; i= i+1) begin
dly = $random;
#(dly) enable <= ~enable;
$display("i=%0d dly=%0d", i, dly);
#50;
end
#50 $finish;
end
endmodule
<노스크립트>  시뮬레이션 로그
시뮬레이션 로그 xcelium> run FREQ = 100000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 200000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 5.000 ns CLK_ON = 2.500 ns CLK_OFF = 2.500 ns QUARTER = 1.250 ns START_DLY = 0.000 ns FREQ = 400000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 2.500 ns CLK_ON = 1.250 ns CLK_OFF = 1.250 ns QUARTER = 0.625 ns START_DLY = 0.000 ns FREQ = 800000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 1.250 ns CLK_ON = 0.625 ns CLK_OFF = 0.625 ns QUARTER = 0.312 ns START_DLY = 0.000 ns i=0 dly=36 i=1 dly=129 i=2 dly=9 i=3 dly=99 i=4 dly=13 i=5 dly=141 i=6 dly=101 i=7 dly=18 i=8 dly=1 i=9 dly=13 Simulation complete via $finish(1) at time 1110 NS + 0
module tb;
wire clk1;
wire clk2;
reg enable;
reg [7:0] dly;
clock_gen u0(enable, clk1);
clock_gen #(.FREQ(50000), .PHASE(90)) u1(enable, clk2);
initial begin
enable <= 0;
for (int i = 0; i < 10; i=i+1) begin
dly = $random;
#(dly) enable <= ~enable;
$display("i=%0d dly=%0d", i, dly);
end
#50 $finish;
end
endmodule
<노스크립트>  시뮬레이션 로그
시뮬레이션 로그 xcelium> run FREQ = 100000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 100000 kHz PHASE = 90 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 2.500 ns FREQ = 100000 kHz PHASE = 180 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 5.000 ns FREQ = 100000 kHz PHASE = 270 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 7.500 ns i=0 dly=36 i=1 dly=129 i=2 dly=9 i=3 dly=99 i=4 dly=13 i=5 dly=141 i=6 dly=101 i=7 dly=18 i=8 dly=1 i=9 dly=13 Simulation complete via $finish(1) at time 1110 NS + 0
module tb;
wire clk1;
wire clk2;
wire clk3;
wire clk4;
reg enable;
reg [7:0] dly;
clock_gen u0(enable, clk1);
clock_gen #(.DUTY(25)) u1(enable, clk2);
clock_gen #(.DUTY(75)) u2(enable, clk3);
clock_gen #(.DUTY(90)) u3(enable, clk4);
initial begin
enable <= 0;
for (int i = 0; i < 10; i= i+1) begin
dly = $random;
#(dly) enable <= ~enable;
$display("i=%0d dly=%0d", i, dly);
#50;
end
#50 $finish;
end
endmodule
<노스크립트>  시뮬레이션 로그
시뮬레이션 로그 xcelium> run FREQ = 100000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 100000 kHz PHASE = 0 deg DUTY = 25 % PERIOD = 10.000 ns CLK_ON = 2.500 ns CLK_OFF = 7.500 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 100000 kHz PHASE = 0 deg DUTY = 75 % PERIOD = 10.000 ns CLK_ON = 7.500 ns CLK_OFF = 2.500 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 100000 kHz PHASE = 0 deg DUTY = 90 % PERIOD = 10.000 ns CLK_ON = 9.000 ns CLK_OFF = 1.000 ns QUARTER = 2.500 ns START_DLY = 0.000 ns i=0 dly=36 i=1 dly=129 i=2 dly=9 i=3 dly=99 i=4 dly=13 i=5 dly=141 i=6 dly=101 i=7 dly=18 i=8 dly=1 i=9 dly=13 Simulation complete via $finish(1) at time 1110 NS + 0
아래 파형은 Enable이 Low일 때 클럭이 멈추고 Enable이 High일 때 클럭이 시작되는 것을 보여줍니다.
<노스크립트>
verilog
Verilog는 하드웨어 설명 언어이며 설계자가 RTL 설계를 시뮬레이션하여 논리 게이트로 변환할 필요가 없습니다. 시뮬레이션이 필요한 이유는 무엇입니까? 시뮬레이션은 RTL 코드가 의도한 대로 동작하는지 확인하기 위해 다른 시간에 다른 입력 자극을 설계에 적용하는 기술입니다. 기본적으로 시뮬레이션은 설계의 견고성을 검증하기 위해 잘 따라야 하는 기술입니다. 또한 가공된 칩이 실제 세계에서 사용되는 방식과 다양한 입력에 반응하는 방식과 유사합니다. 예를 들어, 위의 디자인은 출력 pe 보여진 바와 같이. 시뮬레이션을 통해
디자인 module pr_en ( input [7:0] a, input [7:0] b, input [7:0] c, input [7:0] d, input [1:0] sel, output reg [7:0] out); always @ (a or b or c or d or sel) begin if (sel == 2b00) out <= a; else if