

사물 인터넷 기술

산업 제조
이 이야기는 반자율 자동차 기술에 관한 AspenCore 특별 프로젝트의 일부입니다.
이 특별 프로젝트의 다른 기사를 확인하십시오.
 SAM 기술 특별 프로젝트 소개
SAM 기술 특별 프로젝트 소개  운전할 수 없는 사람을 위한 차를 만드는 방법
운전할 수 없는 사람을 위한 차를 만드는 방법  눈은 그것을 가지고
눈은 그것을 가지고  자동차를 개조하자
자동차를 개조하자 이 프로젝트 및 AspenCore 네트워크에서 다루는 기타 주제에 대한 자세한 내용은 특별 프로젝트 홈페이지를 방문하십시오.
거동이 심하게 제한된 사람이 자동차를 운전할 수 있도록 하는 시스템을 구축하려면 어떻게 해야 합니까? Arrow Electronics는 SAM(Semi-Autonomous Motorcar) 프로젝트로 이에 답했습니다. 주로 기성품(OTS) 제품에 의존하고 상업적으로 이용 가능하지 않은 필요한 몇 가지를 구축하면서 SAM 팀의 엔지니어는 센서 입력을 받아 드라이브 바이 와이어에 공급하는 시스템을 통합했습니다. 시스템.
일반적으로 분해의 목적은 시스템을 열어 여러 가지 이유(예:제품 안전, 제품 무결성, 지적 재산권 보호 또는 IP 보호)로 제조업체가 봉인한 것을 발견하는 것이지만 Arrow는 항상 다음과 같이 말했습니다. SAM 자동차에 무엇이 들어 있었는지, 그래서 이것은 일반적인 분해가 아닐 것입니다. Arrow가 설계한 HMI(인간-기계 인터페이스) 컨트롤러용 BOM(Bill of Materials)을 포함하여 시스템의 모든 요소에 대한 상당히 완전한 목록이 있습니다.
간단히 말해서 SAM 자동차는 두 가지 핵심 센서 시스템을 사용하여 구동됩니다. 4개의 모션 추적 카메라 세트가 스티어링을 위해 운전자의 머리 움직임을 캡처합니다. 압력을 측정하는 sip/puff 센서도 있습니다. 운전자는 튜브를 통해 흡입(한모금)하여 제동하고, 숨을 내쉬(퍼프)하여 가속합니다. 또한 GPS 기반 내비게이션 시스템은 차량이 코스에서 급격하게 벗어나는 것을 방지하는 데 도움이 됩니다. 센서 데이터는 처리되어 하청업체에서 제공하는 드라이브 바이 와이어 시스템으로 공급됩니다. 추가 세부 사항은 EETimes:운전할 수 없는 사람을 위한 차를 만드는 방법에 대한 기사에 나와 있습니다.
중요한 작업의 대부분은 소프트웨어에서 수행되었습니다. 여기에는 내비게이션 시스템을 미세 조정하고 센서 데이터를 사용하여 궁극적으로 차량을 제어하는 방법이 포함되었습니다.
운전에 직접 사용되지 않는 대부분의 물리적 하위 시스템(입력 센서, 드라이브 바이 와이어 액츄에이터 및 공동 운전자 안전 장치 포함)은 운전자 뒤에 설치됩니다. 최초의 SAM 차량으로 사용되었던 쉐보레 콜벳의 경우 트렁크에 있었습니다. 이러한 하위 시스템은 다음 사진에 나열되어 있습니다.
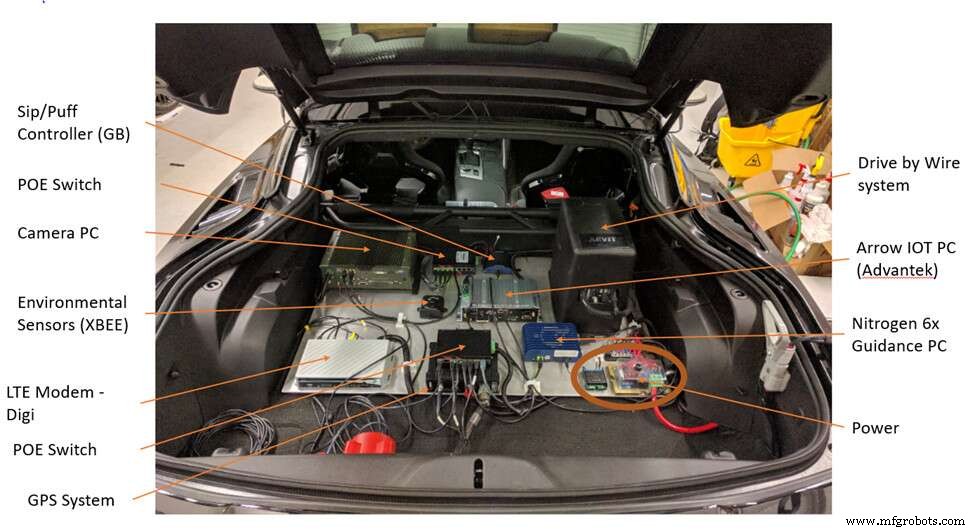
Arrow Electronics의 SAM 프로젝트 프로젝트 팀은 Chevrolet Corvette Stingray의 트렁크를 사용하여 사지 마비 운전자가 차량을 작동하는 데 필요한 대부분의 하위 시스템을 저장했습니다. 출처: 애로우 일렉트로닉스.
한 모금/퍼프 컨트롤러
sip/puff 컨트롤러는 가속 및 제동을 제어하기 위해 압력을 측정할 뿐만 아니라 해당 수준에 대한 피드백(시각, 청각 및/또는 촉각)을 운전자에게 전달하는 데 사용할 수도 있습니다. 이 보드의 주요 구성 요소는 다음과 같습니다.
보드용 BOM에는 일부 EEPROM도 포함됩니다. 여러 소스의 다양한 저항기, 커패시터 및 스위치; 및 기타 구성 요소.
NXP의 MPXV7025GP 압력 센서 출처: 애로우 일렉트로닉스
안내 컴퓨터
SAM 엔지니어인 Josh Willis는 안내 컴퓨터가 "조향 및 가스/브레이크 값을 집계한 다음 CAN 버스를 통해 드라이브 바이 와이어 시스템과 인터페이스하는 일련의 수동 제어 장치 역할을 합니다."라고 말했습니다. 위 사진에서 Nitrogen 6X Guidance PC라고 하며, 자동차 트렁크의 오른쪽 하단 모서리에 있는 파란색 상자입니다. Nitrogen 6X 단일 보드 컴퓨터(SBC)는 기성품입니다. NXP의 i.MX 6 ARM-Cortex A9 프로세서를 기반으로 하는 이 보드에는 1GB DDR3 및 기가비트 이더넷도 기본으로 제공됩니다. Arrow는 Boundary Devices에게 PoE를 지원하는 단일 수정 사항을 요청했습니다.
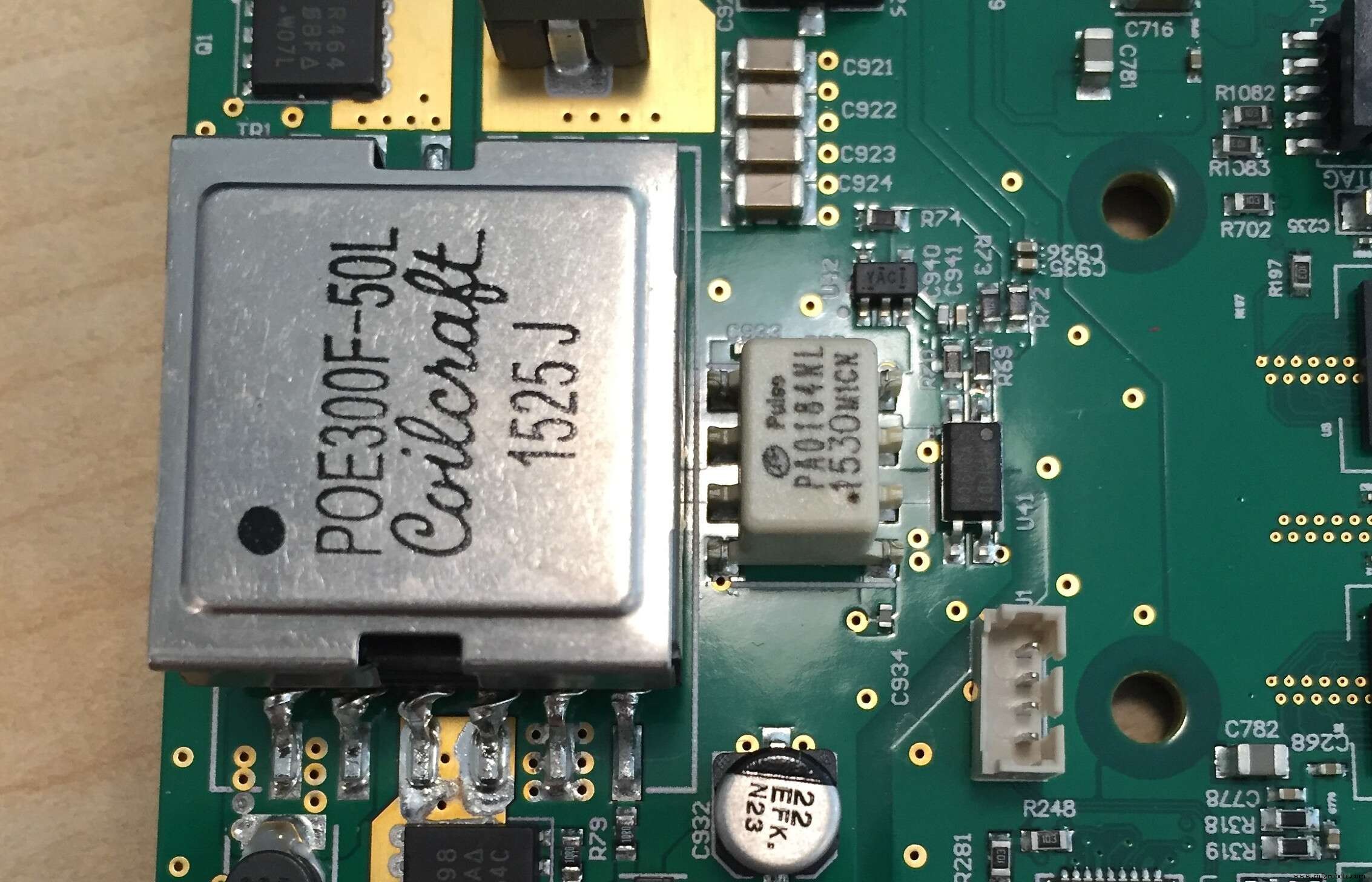
SAM 자동차 팀은 대부분 기성품 하위 시스템에 의존했습니다. 수정이 필요한 경우 PoE에 대한 지원을 추가하는 경우가 많았습니다. 출처: 애로우 일렉트로닉스
사물 인터넷 기술
고객은 부품을 제조할 때 다양한 선택을 할 수 있습니다. 일반적으로 사용할 프로세스를 결정하는 것은 제조 능력, 제품 타당성 및 비용으로 귀결됩니다. 매몰 주조 비용을 평가할 때 많은 고객이 이 프로세스를 얻는 데 드는 비용에 대해 이야기합니다. 비용은 필요한 부품 수와 같은 특정 제조 요구 사항에 따라 고객마다 다를 수 있습니다. 그러나 제조 기술을 결정할 때 고려해야 할 몇 가지 주요 비용 동인이 있습니다. 투자 주조와 관련된 몇 가지 비용 동인을 살펴보겠습니다. 디자인 복잡성 부품의 설계는 매몰 주조 비용에서 중요한 요
모래 주조는 다양한 금속으로 부품을 생산하는 비용 효율적인 방법입니다. 그러나 프로세스와 제작 중인 부품을 자세히 살펴보면 때때로 비용을 절감할 수 있는 기회가 나타날 수 있습니다. 핵심은 비용에 가장 큰 영향을 미치는 요인을 아는 것입니다. 반복 및 비반복 비용 모래 주조는 금속 성형 공정입니다. 용융 금속을 모래에 형성된 공동에 붓고 응고되도록 합니다. 냉각되면 주조 부품이 모래에서 부서지고 러너와 라이저(금속이 캐비티 안팎으로 흐르는 채널)가 제거됩니다. 여기에서 부품은 구멍, 나사산 및 장착 표면과 같은 엄격한 공차 형상이