

나노물질

산업 제조
탄소 나노튜브의 움직임을 제어하는 것은 나노 로봇을 포함한 나노 장치를 조작하는 데 중요합니다. 여기에서 우리는 분자 역학 시뮬레이션을 사용하여 Si 기판에서 SWCNT(10,10)의 동작 거동을 조사합니다. 우리는 수산기가 탄소 나노튜브의 운동 모드에 민감한 영향을 미친다는 것을 보여줍니다. 탄소나노튜브와 실리콘 기판 표면의 수산기 비율이 각각 10%와 20%보다 크면 탄소나노튜브의 운동이 슬라이딩에서 롤링으로 변환됩니다. 하이드록실 그룹의 비율이 작을 때 슬라이드 또는 롤 모드는 탄소 나노튜브의 속도에 의해 제어될 수 있으며, 이는 궁극적으로 계면 위치 에너지와 운동 에너지 간의 경쟁에 의해 결정됩니다. 움직임 모드의 변화는 하이드록실 그룹이 있는 다른 탄소 나노튜브에 적용됩니다. 키랄성은 하이드록실 그룹의 비율로 인한 직경과 달리 운동 거동에 거의 영향을 미치지 않습니다. 우리의 연구는 수산기를 통해 탄소 나노튜브의 운동 거동을 제어하는 새로운 경로를 제안합니다.
<섹션 데이터-제목="배경">나노전자기계 시스템(NEMS) 및 나노로봇의 동작 동작을 제어하는 것은 표면 및 인터페이스 효과로 인해 복잡하고 어려운 문제입니다. 천연, 합성, 물리적 및 기타 에너지원의 자극은 나노 및 마이크로 모터의 기계적 움직임을 제어할 수 있습니다[1]. 예를 들어, 외부 전기장의 도움으로 비극성 나노카를 단방향으로 구동하고[2] 4륜 분자를 방향으로 구동하고[3] 분자 나노카를 방향으로 열 구동하는 것이 가능합니다[4].
탄소 나노튜브는 우수한 전기적, 기계적 및 열적 특성으로 인해 NEMS에서 중요한 역할을 합니다. 나노기어[5], 나노모터[6, 7], 나노베어링[8, 9], 나노크기 전기기계 액추에이터[10]와 같은 탄소 나노튜브를 기반으로 하는 나노장치가 설계되었습니다. 그러나 이러한 나노 장치의 움직임을 조정하는 것은 여전히 미해결 문제입니다. 연구 문서는 열 구배가 동축 나노튜브를 작동시키는 데 사용되었다고 보고했습니다[11]. 한편, 연구자들은 계면 사이의 공평하거나 공평하지 않은 상태[12], 탄소 나노튜브의 변형[13,14,15], 탄소 나노튜브의 모터의 끝 [16]. 이러한 요인들 중에서 탄소나노튜브에 작용기를 도입하는 것은 비교적 쉽게 달성할 수 있다. 연구원들은 표면 불소화 탄소 나노튜브[17], 다른 작용기를 갖는 산화 그래핀 층[18], 수소화 그래핀[19, 20]의 운동 및 마찰 특성을 연구했습니다. 그러나 도입된 수산기가 탄소나노튜브의 운동 거동에 미치는 영향은 지금까지 보고된 바 없다. 이 논문은 하이드록실 그룹의 도입이 탄소 나노튜브의 롤링 또는 슬라이딩 거동을 조정할 수 있음을 보여줍니다. 우리의 연구는 랙-앤-피니언 나노기어와 같은 탄소 나노튜브를 기반으로 하는 정교한 분자 기계 시스템의 방향 제어 운동에 대해 밝힐 수 있습니다. 게다가, 큰 잠재력을 가진 나노스크롤과 같은 다른 원통형 나노물질의 경우[21], 결과는 또한 그들의 움직임을 제어할 수 있는 방법을 제공합니다.
시뮬레이션 모델은 단일벽 탄소 나노튜브(10,10)(SWCNT)와 Si 기판으로 구성됩니다. 그림 1과 같이 세 가지 다른 구조가 고려됩니다. 모델 a는 수평으로 배향된 탄소 나노튜브와 Si 기판을 포함하는 이상적인 시뮬레이션 모델(그림 1a)입니다. 모델 b는 탄소나노튜브와 하이드록실 그룹으로 덮인 Si 기판으로 구성됩니다(그림 1b). 모델 c도 탄소나노튜브와 Si 기판으로 구성되어 있지만 두 부분 모두 표면의 수산기로 덮여 있습니다(그림 1c). Si 기판 상의 수산기 함량은 Si 기판 표면 상의 Si 원자 수에 대한 수산기 수의 비율을 의미한다. Si(0 0 1) 기판의 치수는 x에서 8.01nm입니다. y 방향 및 7.98nm 방향. Si 기판은 5400개의 Si 원자로 구성됩니다.
<그림>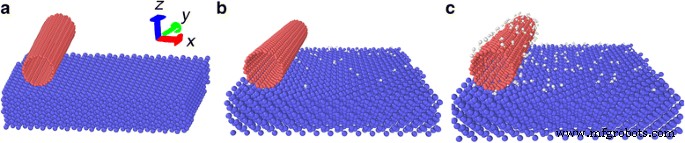
시뮬레이션 모델. 아 이상적인. ㄴ 하이드록실 그룹으로 덮인 Si 기판. ㄷ 탄소나노튜브와 Si 기판은 모두 수산기로 덮여 있습니다.
AIREBO 전위[22]와 TERSOFF 전위[23]는 각각 탄소나노튜브 내의 C 원자와 기판 내의 Si 원자 간의 상호작용을 설명하기 위해 적용됩니다. O 원자는 AIREBO 전위에서 고려되지 않기 때문에 OPLS 힘장은 Si 기판의 Si-O-H와 탄소 나노튜브의 C-O-H를 설명하는 데 사용됩니다[24,25,26,27]. 모델 c에서 계면 사이의 수소 결합은 DREIDING force field[28]에 의해 계산됩니다. 탄소 나노튜브와 Si 기판 사이의 Van der Waals 힘은 Classic 12-6 Lennard-Jones(L-J) 전위로 설명됩니다[29]. C, H, O에 대한 매개변수는 문헌[25]에서 찾을 수 있고 Si에 대한 매개변수는 문헌[28]에 있습니다. 여기에 제시된 탄소 나노튜브의 움직임은 LAMMPS(Large-Scale Atomic/Molecular Massively Parallel Simulator)에 의해 시뮬레이션됩니다[30]. 모든 시뮬레이션은 표준 앙상블(NVT)에서 수행됩니다. 시스템 온도는 300K입니다. Nosé-Hoover 온도 조절 장치와 모델 a의 Langevin 온도 조절 장치를 사용한 결과를 비교하면 Langevin 온도 조절 장치가 탄소 나노튜브의 운동에 거의 영향을 미치고 시스템이 평형에 더 쉽게 도달하도록 하는 것으로 나타났습니다. 따라서 Langevin 온도 조절 장치가 시뮬레이션에 채택됩니다. Langevin 온도 조절기의 감쇠 계수, t r Langevin 방정식에서 임의의 힘의 기여도를 나타내는 는 모든 경우에 대해 0.1ps로 설정됩니다[31]. Si 기판의 바닥층 원자는 Si 웨이퍼를 시뮬레이션하기 위해 고정됩니다. 주기 경계 조건은 x를 따라 적용됩니다. 그리고 y 지도. y에서 탄소나노튜브와 Si 기판에 대해 동일한 주기 경계를 수행하기 위해 방향, Si 기판은 y를 따라 1.90% 압축됩니다. 작은 방향; 따라서 탄소나노튜브의 움직임에 대한 영향은 무시할 수 있습니다. 동역학 방정식의 수치 적분은 0.001ps의 시간 간격으로 Velocity-Verlet 알고리즘에 의해 수행됩니다. 시뮬레이션 과정은 다음과 같습니다. 첫째, 시뮬레이션 시스템의 구조는 에너지 최소화를 통해 최적화된다. 그런 다음 시스템이 평형에 도달하도록 100ps 동안 이완을 수행합니다. 마지막으로 x를 따라 탄소나노튜브에 일정한 속도 또는 일정한 힘이 가해집니다. 방향은 Si 기판에서 움직이도록 설정됩니다. x를 따라 일정한 속도 탄소나노튜브 중심의 횡력을 0으로 하여 방향을 진행합니다.
먼저 x에서 탄소 나노튜브의 일정한 병진 속도를 10m/s로 설정했습니다. 방향. 모델과 b 모두에서 탄소 나노튜브는 기판 위에서 미끄러집니다. 그러나 탄소 나노튜브와 Si 기판이 모두 수산기로 덮인 모델 c에서 롤링이 발생합니다. 탄소나노튜브와 Si 기판의 수산기 비율이 모두 10%일 때 탄소나노튜브가 Si 기판 위에서 구르면서 약간의 미끄러짐이 발생합니다(추가 파일 1:Movie S1). 또한 탄소나노튜브와 Si 기판의 수산기 비율이 각각 10%와 20%이면 시뮬레이션 시간 동안 탄소나노튜브가 Si 기판 위에서 계속 굴러갑니다(추가 파일 2:Movie S2). 그림 2a는 탄소나노튜브와 Si 기판의 수산기 비율이 각각 10%와 20%일 때 탄소나노튜브의 C 원자의 3차원 운동 궤적을 보여줍니다. C 원자의 움직임은 탄소나노튜브의 움직임을 나타내는데, 그 이유는 탄소나노튜브가 모양을 분명히 바꾸지 않을 것이기 때문입니다. 탄소나노튜브의 z 좌표 방향은 분명히 위아래로 움직이며 최대 z 변위는 약 1.3nm이며, 이는 1.38nm의 SWCNT(10,10) 직경과 유사합니다. 결과는 롤링의 동작을 나타냅니다. 탄소 나노튜브는 x에서 약 10.8nm 이동합니다. 방향. x에서 등속 10m/s이기 때문에 방향이 탄소 나노튜브에 적용되어 탄소 나노튜브가 x에서 9.5nm 이동합니다. 950ps 모션 프로세스 동안 방향. 따라서 x의 추가 이동 거리는 방향은 1.3nm입니다. 이 값은 z 변위의 최대값과 같으며, 이는 롤링이 모션에서 지배적임을 나타냅니다. 게다가 y 방향도 생긴다. 그 이유는 탄소나노튜브가 y 방향으로 미끄러지게 만드는 수산기의 무작위 분포로 인한 탄소나노튜브의 축 방향을 따른 불균형력 때문일 수 있습니다. 방향. 이와 유사한 현상은 다른 연구에서도 찾아볼 수 있다[31]. 탄소나노튜브와 Si 기판의 수산기 비율이 5%와 5%, 5%와 10%로 변하면 탄소나노튜브의 움직임이 달라집니다. 그림 2b는 z에서 C 원자의 위치를 보여줍니다. 탄소나노튜브와 Si 기판의 수산기 비율이 각각 5%/5%, 5%/10%, 10%/10% 및 10%/20%일 때 방향입니다. 수산기의 비율이 5%/5% 및 5%/10%인 경우 슬라이딩이 주요 이동이며 약간의 롤링이 동반됩니다. 수산기 비율이 5%/5%인 경우 탄소나노튜브는 약간의 롤링과 함께 약 500ps 슬라이드한 다음 약 500ps 롤링됩니다. 수산기 비율이 5%/10%인 경우 탄소나노튜브는 약 500ps의 약간의 롤링과 함께 미끄러졌다가 계속 미끄러진다.
<그림>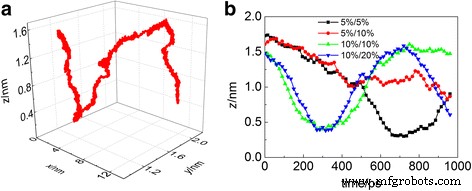
아 탄소나노튜브에 있는 C 원자의 3차원 운동 궤적. 탄소나노튜브와 Si 기판의 수산기 비율은 각각 10%와 20%입니다. ㄴ z에서 탄소 나노튜브의 C 원자 좌표 시간의 함수로서의 방향. 탄소나노튜브와 Si 기판의 수산기 비율은 각각 5%/5%, 5%/10%, 10%/10% 및 10%/20%입니다.
추가 파일 1:영화 S1 . (AVI 4439kb)
추가 파일 2:영화 S2 . (AVI 4929kb)
수산기로 인한 움직임 모드의 변화 메커니즘을 확립하기 위해 SWCNT의 움직임 거동이 계면 전위 장벽에 의해 영향을 받기 때문에 다양한 조건에서 계면 전위 에너지를 조사합니다[15]. 모델 a와 c에서 탄소 나노튜브와 Si 기판 사이의 계면 전위 에너지는 그림 3a, b에 표시되어 있으며, 이는 탄소 나노튜브가 x 그리고 y 이완 후 각각의 방향. 모델 c에서 탄소나노튜브와 Si 기판의 수산기 비율이 10%/20%인 경우는 탄소나노튜브가 이 조건에서 계속 회전하기 때문에 선택됩니다. 이상적인 모델 a에서는 탄소나노튜브와 Si 기판 사이의 균형이 맞지 않는 상태로 인해 계면 사이의 위치 에너지 분포가 균일합니다. 그 결과 탄소나노튜브가 기판 위에서 미끄러진다. 그러나 모델 c에서 계면 사이의 수산기 상호 작용은 계면 위치 에너지의 엄청난 변화를 초래합니다. 국부적 포텐셜 장벽의 최고점은 10 7 도 됩니다. eV. 수산기의 무작위 분포는 고전위 장벽의 균일한 분포를 유발합니다. 따라서 탄소나노튜브는 전위장벽을 직접적으로 통과할 수 없어 롤링을 일으켜 계면 전위장벽을 감소시킨다. 잠재적인 장벽은 수산기의 무작위 분포로 인해 전체 표면을 덮기 때문에 탄소 나노튜브는 x를 따라 계속 굴러갑니다. 방향. 탄소나노튜브와 Si 기판의 수산기 비율이 5%/5%, 5%/10%, 10%/10%인 경우는 수산기가 수산기인 경우보다 전위 장벽이 상대적으로 낮습니다. ' 비율은 10%/20%입니다. 그 이유는 계면의 수산기가 적을수록 상호 작용이 약하기 때문입니다. 탄소나노튜브의 운동에너지가 장벽보다 높으면 미끄러진다. 그렇지 않으면 탄소나노튜브가 굴러다니기 시작합니다.
<그림>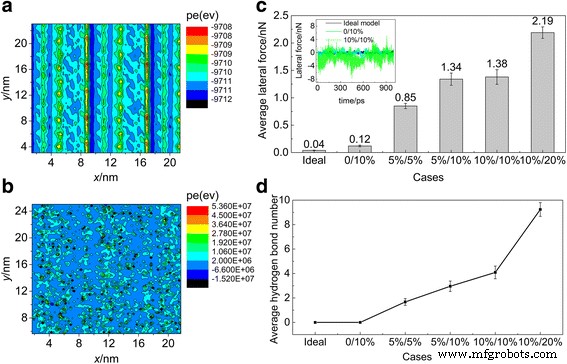
아 , b 탄소나노튜브와 Si 기판 사이의 계면 위치 에너지. 아 이상적인 모델입니다. ㄴ 탄소나노튜브와 Si 기판의 수산기 비율은 10%/20%입니다. ㄷ 6개의 경우에서 탄소 나노튜브의 평균 마찰. 삽입된 그림은 모델 a, b, c의 세 가지 경우에서 시간에 따른 탄소나노튜브의 마찰을 보여줍니다. 모델 b와 c에서 탄소나노튜브와 Si 기판의 수산기 비율은 각각 0/10% 및 10%/10%입니다. d c의 6가지 경우의 평균 수소 결합 수
계면 사이의 수산기 도입은 탄소나노튜브의 운동뿐만 아니라 계면 간의 마찰에도 영향을 미친다. 그림 3c는 탄소나노튜브와 Si 기판의 수산기 비율이 0/0, 0/10%, 5%/5%, 5%/10%, 10%인 6가지 경우의 탄소나노튜브의 평균 마찰을 보여줍니다. /10% 및 10%/20%. 결과는 평균 마찰이 수산기의 비율에 따라 크게 증가함을 보여줍니다. 모델과 b에서 평균 마찰력은 거의 0입니다. 수산기의 도입으로 인해 표면 거칠기가 증가하기 때문에 모델 b의 평균 마찰은 이상적인 모델의 평균 마찰보다 큽니다. 그림 3c의 삽입은 모델 b에서 횡력의 변동이 모델 a보다 더 크다는 것을 보여줍니다. 모델 c에서 탄소나노튜브와 Si 기판은 모두 그라프트된 수산기이기 때문에 횡력의 변동과 평균 마찰은 모델 a와 b보다 훨씬 더 큽니다. 수산기의 비율이 10%/20%일 때 평균 마찰은 약 2.19nN으로 증가합니다.
마찰 및 운동 거동의 메커니즘에 대한 보다 심층적인 통찰력을 얻기 위해 우리는 운동 중 화학 결합을 연구했습니다. 우리는 계면의 하이드록실 그룹 사이에 수소 결합이 형성되는 것을 관찰합니다. 이 6가지 경우에 해당하는 평균 수소 결합 수는 그림 3d에 나와 있습니다. 수소 결합 수의 증가는 수산기 비율의 증가와 함께 더 높은 전위 장벽 및 마찰로 이어집니다. 이는 수소결합이 마찰에 큰 영향을 미친다는 내용이다[32].
탄소나노튜브의 운동 거동은 계면 사이의 수산기뿐만 아니라 탄소나노튜브의 속도에 의해 영향을 받으며, 특히 계면의 수산기 수가 적어 계면 전위 장벽이 상대적으로 낮을 때 더욱 그러하다. 20, 50, 70m/s의 속도에서 탄소 나노튜브를 사용하여 그림 4a는 z에서 C 원자의 좌표를 보여줍니다. 탄소나노튜브와 Si 기판의 수산기 비율이 5%/5%일 때 방향입니다. 20m/s의 속도에서 탄소 나노튜브의 움직임은 롤링이 지배적입니다. 50m/s의 속도로 탄소 나노튜브는 x 한 라운드 동안 방향과 롤링이 발생하므로 슬라이딩과 롤링이 교대로 발생합니다. 70m/s의 속도로 탄소나노튜브는 주로 기판 위에서 약간의 롤링과 함께 미끄러집니다. 그 이유는 표면 사이에 도입된 수산기가 탄소나노튜브의 움직임을 조절할 수 있기 때문이다. 계면장벽이 상대적으로 낮기 때문에 탄소나노튜브의 운동에너지가 크면 탄소나노튜브가 직접 통과한다. 그러나 운동에너지가 낮으면 탄소나노튜브가 구르면서 계면장벽을 낮추는 경향이 있다. 또한 수산기 비율이 5%/5%일 때 탄소나노튜브의 속도에 따른 평균 마찰력의 곡선을 그림 4b에 나타내었다. 마찰은 속도에 따라 감소하며, 이는 다른 연구자의 실험 작업과 일치합니다[32].
<그림>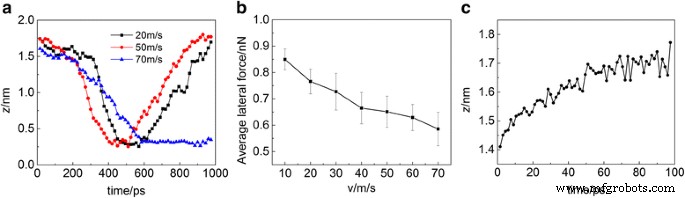
아 z에서 탄소 나노튜브의 C 원자 좌표 탄소 나노튜브가 20, 50, 70m/s의 속도로 움직일 때 시간의 함수로서의 방향. ㄴ 탄소나노튜브의 속도에 따른 평균 마찰력 곡선. ㄷ z에서 탄소나노튜브의 C 원자 좌표 탄소나노튜브와 Si 기판의 수산기 비율이 5%/10%일 때 방향입니다. 탄소 나노튜브에 가해진 일정한 외력은 x에서 0.000625nN입니다. 방향
x에서 탄소나노튜브에 일정한 외력을 가해도 유사한 결과를 얻을 수 있습니다. 방향. 한편, 외력이 크면 탄소나노튜브는 기판 위에서만 미끄러진다. 반면에 힘이 너무 작으면 탄소나노튜브가 움직일 수 없습니다. 결과적으로 0.000625nN의 일정한 외력 하에서 롤-슬라이드 전이가 발생합니다. 그림 4c는 z에서 탄소나노튜브의 C 원자 좌표를 보여줍니다. 탄소나노튜브와 Si 기판의 수산기 비율이 5%/10%일 때 방향입니다. 결과는 z에서 C 원자의 좌표가 방향은 롤링 모드를 나타내는 첫 번째 단계에서 분명히 증가합니다. 그런 다음 z의 좌표 이후 단계에서는 방향이 많이 바뀌지 않습니다. 즉, 슬라이딩 모드가 모션에서 지배적입니다. 그 이유는 탄소나노튜브의 운동에너지가 초기에 작아 계면장벽을 직접적으로 극복하지 못해 롤링 현상이 발생하기 때문이다. 탄소나노튜브의 운동에너지가 증가함에 따라 그 움직임은 롤에서 슬라이드로 변합니다.
우리는 탄소 나노튜브의 키랄 각도, 직경 및 길이가 모션 거동에 미치는 영향을 추가로 조사합니다. 먼저 SWCNT(11,9), SWCNT(12,8), SWCNT(13,7), SWCNT(14,6) 및 SWCNT(15,0)의 5가지 구성을 사용하여 키랄 각 효과를 조사합니다. 각도는 다양하지만 직경은 거의 같습니다. 결과는 이들의 운동 거동이 SWCNT(10,10)의 운동 거동과 동일하다는 것을 보여주며, 이는 접목된 하이드록실 탄소 나노튜브의 운동 거동에 대한 키랄 각의 영향이 무시될 수 있음을 나타냅니다. 다음으로 직경의 영향을 연구하기 위해 SWCNT(7,7), SWCNT(15,15), SWCNT(20,20) 및 SWCNT(25,25)를 선택합니다. 모델 b의 결과는 SWCNT의 결과와 유사하다(10,10). 그러나 모델 c의 결과는 SWCNT의 결과와 다릅니다(10,10). SWCNT(15,15), SWCNT(20,20), SWCNT(25,25)의 모션 모드가 연속 압연으로 변경될 때 수산기의 비율은 10%/25%, 15%/30%, 각각 20%/30%. 직경이 클수록 모션 모드가 변경될 때 수산기의 비율이 높아집니다. 그 이유는 인터페이스 접촉 면적의 변화에 기인할 수 있습니다. 인터페이스 구조는 SWCNT(15,15), SWCNT(20,20) 및 SWCNT(25,25)가 모두 바닥에 플랫폼이 있음을 보여줍니다(그림 5 참조). 이는 더 높은 마찰과 어려움을 야기합니다. 롤. 하이드록실 그룹의 비율이 높을수록 더 강한 계면 상호 작용을 제공하고 최종적으로 롤링이 발생합니다. SWCNT(7,7)와 SWCNT(10,10)는 모두 바닥에 플랫폼이 없기 때문에 SWCNT(7,7)의 동작거동은 SWCNT(10,10)와 거의 동일하다. 마지막으로 SWCNT(10,10)의 길이를 변경하여 모션에 대한 길이 효과를 탐색합니다. 21.7, 54.3, 81.4nm의 세 가지 길이가 명시적으로 조사되었습니다. 길이가 21.7nm인 SWCNT(10,10)의 모션 동작이 초기 모델 c와 일치함을 발견했습니다. 그러나 길이가 54.3 및 81.4 nm인 경우 길이 대 직경의 큰 종횡비로 인해 압연 과정에서 약간의 굽힘 변형이 나타납니다.
<그림>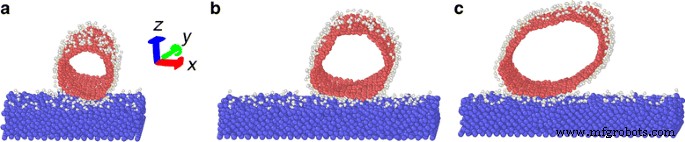
Si 기판 상의 탄소나노튜브 구조. 아 SWCNT(15,15). ㄴ SWCNT(20,20). ㄷ SWCNT (25,25)
요약하면, 계면 사이에 하이드록실 그룹이 도입되면 수소 결합이 형성되어 계면 장벽과 마찰이 증가한다는 사실이 밝혀졌습니다. Si 기판 위의 탄소나노튜브의 움직임 모드(슬라이드 또는 롤)는 계면에 도입된 수산기의 비율과 탄소나노튜브의 속도에 의해 조정될 수 있습니다. 탄소나노튜브와 Si 기판의 수산기 비율이 작은 경우(<10%/20%), 탄소나노튜브의 운동은 계면 전위 장벽과 운동 에너지에 따라 달라집니다. 탄소나노튜브의 운동에너지가 크면 탄소나노튜브가 기판 위에서 미끄러진다. 그렇지 않으면 탄소 나노튜브는 장벽을 낮추기 위해 굴러가는 경향이 있습니다. 탄소나노튜브와 Si 기판의 수산기 비율이 10%/20%보다 높으면 계면 포텐셜 에너지 장벽이 매우 높아 탄소나노튜브가 계속 구르게 된다. 모션 모드의 조정은 하이드록실 그룹의 비율을 조정하여 키랄 각도, 길이 및 직경이 다른 CNT에 실현 가능합니다. 탄소나노튜브의 움직임 모드에 대한 하이드록실 그룹의 효과는 CNT의 움직임을 제어하는 데 사용될 수 있으며 프로그래밍 가능한 나노소자가 제작될 수 있습니다.
대규모 원자/분자 대량 병렬 시뮬레이터
나노전자기계 시스템
단일벽 탄소 나노튜브
나노물질
탄소 섬유는 탄소 섬유로 구성된 매우 강한 폴리머입니다. 이 소재는 가볍고 다양한 산업 분야에서 여러 용도로 사용됩니다. 탄소 섬유는 약간 비싼 편이지만 자동차 및 항공 우주 산업에서 많이 사용되는 소재입니다. 탄소 섬유 합성물은 범선, 자전거, 오토바이와 같은 여러 운송 수단에서 발견됩니다. 다른 산업에서는 강도 때문에 탄소 섬유를 사용하기 시작했습니다. 텐트 폴, 골프 클럽, 헬멧과 같은 일반적인 품목에 사용됩니다. 탄소 섬유는 칼이나 톱질 도구를 사용하는 일반 절단 응용 프로그램으로 절단할 수 있습니다. 연마제와 혼합된
강철의 변형은 탄소로 가능합니다. 철강의 탄소 함량은 다양한 용도로 철강의 특성을 변화시킵니다. 인장 속성은 측정된 강철의 탄소 백분위수를 사용하여 구부릴 수 있는 알루미늄 강철에서 충격 방지 장갑판에 이르기까지 무엇이든 만들 수 있습니다. 강철의 속성 철은 강철의 기본 금속이지만 너무 부드러워서 생산적이지 못합니다. 오스테나이트와 페라이트(탄소의 형태)가 도입되면 강철의 다양한 형성이 실현될 수 있습니다. 시멘타이트와 같은 다른 합금 원소도 강철의 구조적 가치를 변경하는 데 사용할 수 있습니다. 제어된 조건에서 추가 가열 및 냉