

자동화 제어 시스템

산업 제조
과학자들은 Adam Conner-Simons 또는 MIT CSAIL이 보고한 바와 같이 수중 생물에 대한 더 많은 통찰력을 제공하는 '로보트 불가사리'를 발명했습니다. (아래 동영상 참조)
생물학자들은 많은 종류의 물고기가 인간의 수중 움직임에 매우 민감한 것으로 판명됨에 따라 해양 생물을 기록하는 문제를 오랫동안 경험해 왔습니다.
가능한 솔루션으로 컴퓨터 과학자들은 탄소 기반 로봇 사이에서 은밀하게 이동할 수 있는 특수 해양 로봇을 개발해 왔습니다. 예를 들어 2018년 MIT 컴퓨터 과학 및 인공 지능 연구소(CSAIL) 팀은 피지의 산호초를 따라 실제 물고기와 함께 자율적으로 수영하는 부드러운 로봇 물고기를 제작했습니다.
그러나 물이 움직이는 방식의 복잡한 역학과 일부 완벽하게 우수한 전자 시스템을 빠르게 파괴하는 능력으로 인해 수중 로봇은 공기나 육상 로봇에 비해 개발하기가 특히 어렵습니다.
물고기와 함께 CSAIL 팀은 실제로 안정적으로 물 속에서 작동할 수 있도록 디자인을 수동으로 조정하기 위해 몇 달 간의 시행착오를 거쳐야 했습니다.
그 로봇은 특히 복잡한 로봇이었지만 MIT 교수인 Wojciech Matusik과 Daniela Rus가 이끄는 그룹은 여전히 생산 프로세스를 가속화할 여지가 있다고 생각했습니다. 이를 염두에 두고 이제 몇 시간 만에 기능성 소프트 로봇을 시뮬레이션하고 제작할 수 있는 새로운 도구를 만들었습니다.
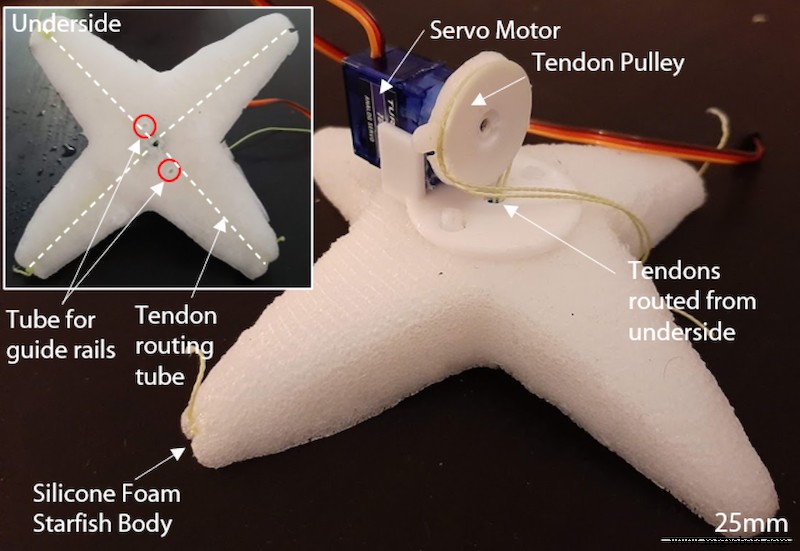
팀은 시스템을 사용하여 실리콘 폼으로 만들어지고 단일 저전력 액추에이터로 움직일 수 있는 부드러운 로봇 불가사리를 만들었습니다. 불가사리는 다리를 구부리고 이완시키는 데 사용되는 서보 모터에 연결된 네 다리의 힘줄을 통해 움직입니다.
CSAIL 박사후 연구원인 Tao Du와 함께 불가사리에 관한 새로운 논문의 공동 저자인 Josephine Hughes는 다음과 같이 말했습니다. 로봇이 안정된 지형을 걸을 때보다 훨씬 더 복잡하기 때문에 제어 시스템을 만들기가 상당히 어렵습니다.
"하지만 이 시뮬레이터를 사용하면 일반적으로 며칠 또는 몇 주가 걸리던 프로세스를 단 몇 시간 만에 완료할 수 있습니다."
Du는 팀이 다리를 쥐었다 떼면 앞으로 움직이는 동작의 단순함과 우아함 때문에 불가사리 디자인을 선택했다고 말합니다.
그러나 팀은 시뮬레이터가 다양한 신체 유형에 작동한다는 것을 발견했으며, 따라서 관절, 지느러미 및 오리발과 같은 더 복잡한 구조를 포함하는 바다 거북, 쥐가오리 및 상어에서 영감을 받은 디자인을 다음으로 탐색할 것입니다.
이 그룹의 도구에는 초기 시뮬레이션을 수행하는 기계 학습 모델과 로봇의 제어 메커니즘 설계가 포함되며, 그 후 빠르게 제작됩니다.
그런 다음 로봇을 사용한 실제 실험을 통해 더 많은 데이터를 수집하여 설계를 반복적으로 개선하고 최적화합니다. 그 결과 로봇은 일반적으로 한 번만 더 다시 제작하면 됩니다. (시뮬레이션 도구의 개발에 대한 별도의 문서는 현재 검토 중입니다.)
연구에 참여하지 않은 싱가포르 국립 대학교의 제어 및 메카트로닉스 교수인 Cecilia Laschi는 "로봇 시뮬레이션을 수행할 때 정의상 시뮬레이션과 현실 사이에 간격을 만드는 근사치를 만들어야 합니다."라고 말합니다. /P>
"이 작업은 매우 효과적인 시뮬레이션 및 실제 실험의 혼합 루프를 사용하여 현실의 격차를 줄이기 위한 것입니다."
불가사리의 몸에는 탄성, 자연 부력, 빠르고 쉽게 제작할 수 있는 능력 때문에 실리콘 폼을 사용했습니다. 실험에서 연구자들은 불가사리가 손으로 만든 컨트롤러를 사용할 때보다 4배 더 빠르게 물 속을 이동할 수 있다는 것을 발견했습니다. 인간 전문가에 의해.
실제로 Hughes는 팀이 시뮬레이터가 인간이 스스로 생각하지 못한 제어 전략을 사용하는 것으로 보인다는 것을 발견했다고 말합니다.
Hughes는 "로봇 불가사리를 통해 우리는 눈에 잘 띄는 다리 추진력 외에도 중요한 추진력을 줄 수 있는 미세한 고주파수 움직임이 있다는 것을 배웠습니다."라고 말합니다.
이 프로젝트는 소프트 로봇에 초점을 맞춘 일련의 CSAIL 프로젝트를 기반으로 하며 Rus는 이 로봇이 강체 로봇보다 더 안전하고 견고하며 민첩할 수 있다고 말합니다.
연구원들은 좁은 공간을 통과해야 하는 환경에서 소프트 로봇에 점점 더 눈을 돌리고 있습니다. 그러한 로봇은 충돌로부터 회복할 수 있는 탄력성이 더 높기 때문입니다.
Laschi는 팀의 도구가 심해의 여러 위치에서 데이터를 측정하고 연구원들이 아직 생각하지 못한 새로운 방식으로 움직일 수 있는 로봇을 일반적으로 구상하기 위한 로봇을 개발하는 데 사용될 수 있다고 말합니다.
"불가사리 로봇과 SoFi와 같은 생체에서 영감을 받은 로봇은 해양 생물을 방해하지 않고 더 가까이 다가갈 수 있습니다."라고 Rus는 말합니다. "미래에는 생체에서 영감을 받은 로봇 기기를 빠르게 설계하고 구축함으로써 야생에 배치되어 생명체를 관찰할 수 있는 맞춤형 관측소를 만드는 것이 가능할 것입니다."
Du와 Hughes는 Matusik, Rus 및 MIT 학부생 Sebastien Wah와 함께 논문을 공동 저술했습니다. 이 논문은 이번 주 Journal of Robotics Automation Letters에 게재되었으며 다음 달 IEEE의 소프트 로봇 공학에 관한 국제 회의(RoboSoft)에서도 가상으로 발표될 예정입니다.
자동화 제어 시스템
산업용 로봇은 1970년대 초 KUKA Robotics와 같은 회사에서 최초의 간단한 산업용 로봇을 출시하면서 등장하기 시작했습니다. 그 이후로 로봇 개발은 기본 그라인딩 및 폴리싱에서 고정밀 용접, 팔레타이징 및 자동 빈 피킹으로 응용 분야가 확장되면서 급속도로 가속화되었습니다. 산업용 로봇의 기하급수적인 성장은 자동차 산업에서 시작되어 다양한 유형의 제조 응용 분야로 확장되었습니다. 로봇의 사용 증가는 로봇이 품질 저하 없이 노동 비용을 절감하고 생산 효율성을 높임으로써 모든 규모의 제조업체 또는 비즈니스를 수익성 있는 글로벌
로봇은 George Charles Devol이 발명한 최초의 산업용 로봇인 Unimate 이후 먼 길을 왔습니다. 그 이후로 산업용 로봇은 국제표준화기구(ISO)에서 3개 이상의 축에서 프로그래밍할 수 있는 자동 제어, 재프로그래밍 가능, 다목적 조작기로 정의되었습니다. 이 기사에서는 현재 또는 미래의 로봇 사용자가 알아야 할 로봇에 대한 몇 가지 주요 사실을 살펴볼 것입니다. 로봇 유형: 로봇에는 3가지 주요 유형이 있습니다. 다관절 로봇 - 이러한 유형의 로봇에는 회전 관절이 있습니다. SCARA - 이 로봇은 Select