

자동화 제어 시스템

산업 제조
통역사를 사용하여 서로를 이해하는 유엔의 국제 대표단과 마찬가지로 다양한 공급업체의 로봇, 기계 및 기타 산업 구성 요소는 서로 다른 컴퓨터 언어를 사용하며 의사 소통을 돕기 위해 번역가가 필요합니다.
주로 경제성 때문에 공작 기계, 로봇, 컨베이어 등을 제조하는 회사는 센서, 드라이버 및 PLC와 같은 구성 요소와 작동 및 통신을 위해 독점 소프트웨어를 사용합니다. 기계 제조업체는 공장 구매 부서가 더 많은 수익을 창출하기 위해 토털 솔루션이라는 브랜드를 고수하기를 원합니다.
Southwest Research의 ROS-Industrial(ROS-I) Consortium Americas 프로그램 관리자인 매튜 로빈슨은 “한때 만연한 생각은 내가 자금을 투자하고 솔루션을 제공하면 매출을 보호하고 싶다는 생각이었습니다. 학회. "내가 공작 기계를 제공하는 경우 고객이 내 모든 제품, 내 소프트웨어, 하드웨어 및 이와 관련된 상호 연결된 기술을 사용하기를 바랍니다."
공장 소유주가 다른 브랜드로 전환하기로 결정하면 커뮤니케이션 문제가 발생하고 생산과 품질을 높일 수 있는 통합, 시뮬레이션 및 분석을 방해합니다.
지금까지 공장의 모든 기술 간의 통신을 가능하게 하는 작업은 3D 카메라에서 로봇으로 또는 서로 다른 공급업체에서 만든 두 로봇 간에 컴퓨터 코드 번역기 또는 다리를 만드는 시스템 통합업체에 주로 맡겨졌습니다. . 시간이 오래 걸리고 비용이 많이 드는 프로세스이므로 엔지니어링 연결 비용이 기계 자체 비용을 초과할 수 있습니다.
지멘스 테크놀로지(Siemens Technology)의 첨단 제조 자동화 연구 그룹 책임자인 후안 아파리시오(Juan Aparicio)는 “엔지니어링 시간이 너무 오래 걸리고 비용이 많이 든다. "자동화를 정당화할 수 있는 큰 예산이 없기 때문에 의미가 없습니다."
이 시나리오는 대규모 문제로 이어졌습니다. 통합과 관련된 시간과 비용이 많은 상점에서 자동화 채택을 방해하고 미국 산업의 발전을 방해하고 있습니다.
제조업체와 Robinson, Aparicio 및 기타 업체와 같은 희망적인 통합 문제 해결사가 현재 경험하고 있는 것은 다른 제조 영역에서 전례가 있는 일입니다.
약 30년 전 반도체 산업에서는 서로 다른 공급업체의 식각 리소그래피 장비와 같은 웨이퍼 처리 장비도 서로 대화할 수 없었습니다. 이 경우 임박한 위축을 방지하기 위해 반도체 제조업체는 컨소시엄을 구성하고 공급업체에 공통 표준을 만들어야 한다고 말했습니다. 바로 그 일이 일어났습니다.
"문제는 '고객의 요구가 [현재] 공통 표준을 만들 만큼 강력합니까?"입니다. 이것은 Rensselaer Polytechnic Institute의 전기, 컴퓨터 및 시스템 엔지니어링 책임자인 John Wen의 말입니다. "아직 두고 봐야 할 일이지만 그 방향으로 움직임이 있는 것 같습니다."
Wen은 또한 현재 공통성을 위한 노력을 기울이고 있으며 공장의 장치가 서로 통신할 수 있도록 기계어를 번역하는 다리를 만들고 있습니다.
그들의 작업은 Manufacturing USA의 일부인 ARM(Advanced Robotics for Manufacturing) 연구소에서 자금을 지원합니다. ARM 인스티튜트가 자금을 지원하는 프로젝트에는 학계의 미들웨어와 자금이 넉넉한 기업가인 Scott Hassan의 미들웨어를 더 높은 기술적 준비 수준으로 개발하여 미들웨어 옵션이 일반 산업용으로 준비되고 실행 가능한 커뮤니케이션으로 공장이 흥얼거리는 데 도움이 될 수 있는 특정 미들웨어 개발이 포함됩니다. .
Wen은 "Robot Raconteur(RR):로봇 공학을 위한 상호 운용 가능한 미들웨어"라는 프로젝트를 이끌고 있습니다. RR은 데이터를 수집하고 카메라 작동과 같은 기능을 호출합니다.
Wen의 연구 제안서에 따르면 "Robot Raconteur ...는 자동화/로봇 시스템을 위한 진정한 플러그 앤 플레이 상호 운용성 기능을 제공하도록 특별히 설계된 고급 증강 객체 지향 미들웨어 기술입니다."라고 합니다.
RR은 이미 다재다능합니다. Linux, Windows, OSX, iOS, Android, OpenBSD, QNX, Arduino 및 xPC Target 운영 체제와 호환됩니다. C++, Python, C#, Java, MATLAB, LabView, 브라우저 JavaScript 및 xPC Target용 라이브러리가 있습니다.
Raconteur 미들웨어는 John Wason이 Wen의 Rensselaer 연구실에서 개발했습니다. Wason은 박사 학위를 취득한 후 미들웨어에 중점을 둔 자신의 회사인 Wason Technology를 분사했습니다. Wason은 Southwest Research Institute 및 United Technology Corp.와 마찬가지로 Rensselaer와 함께 ARM 연구소에서 자금을 지원하는 연구에 참여하고 있습니다.
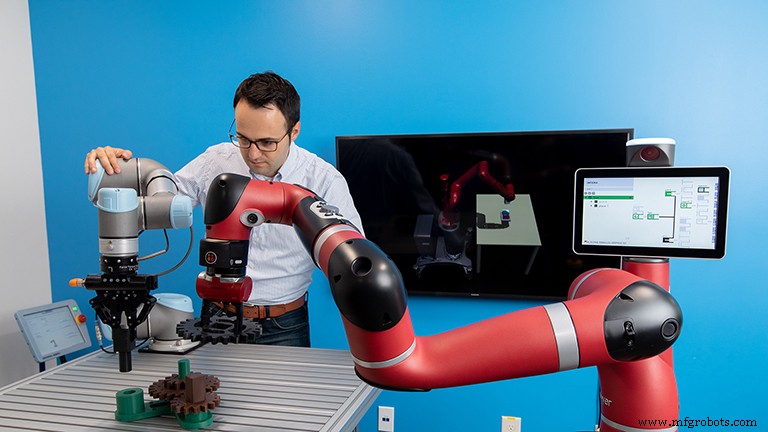
그 동안 산업용 로봇 사용자는 여전히 가르치고 반복하는 프로세스에 의존하여 작업을 수행합니다.
교육 및 반복 패러다임에서 벗어나는 열쇠는 비전, 3D, 레이저 스캐닝, 근접성, 촉각 또는 힘에 상관없이 센서를 사용하는 것이라고 Wen은 말했습니다.
그러나 로봇에 센서를 통합하고 프로그래밍하면 복잡성이 추가됩니다. 추가 비용이 발생합니다. 그리고 센서가 파손될 수 있습니다. 부러질 수 있는 것들이 많을수록 라인이 내려갈 확률이 높아져 플랜트 비용이 발생합니다.
Wen의 솔루션은 RR을 여러 공급업체와 플랫폼의 로봇, 센서, 주변 장치 및 시뮬레이션 소프트웨어를 쉽고 빠르고 안전하게 프로그래밍하고 통합할 수 있는 오픈 소스 플러그 앤 플레이 시스템으로 개발하는 것입니다.
또한 애저 키넥트(Azure Kinect) 및 인텔 리얼센스 3D 카메라(Intel RealSense 3D 카메라)와 같은 저가형 소비자용 제품을 포함해 더 다양한 센서를 사용할 수 있는 기회가 열릴 것이라고 Wen은 말했습니다.
Southwest Research Institute에서 Robinson의 임무는 다양한 장치 세트를 연결할 수 있지만 시각화 및 시뮬레이션도 촉진한다는 점에서 RR과 유사한 또 다른 오픈 소스 미들웨어인 ROS-I를 사용하고 홍보하는 것입니다.
그는 단 하나의 솔루션을 홍보하는 공급업체의 사일로 패러다임이 연결성 분야에서 처음부터 제조에 문제를 야기했다는 것을 알고 있습니다.
따라서 Robinson은 장단점을 저울질하고 IoT의 특정 영역에서 기반인 ROS(로봇 운영 체제)의 부정적인 측면에 대해 솔직하게 말했습니다.
"ROS의 가장 큰 단점 중 하나는 C++가 많다는 것입니다. 이는 빠르게 발전하고 업데이트되는 컴퓨터 언어입니다."라고 그는 말했습니다. “새로 온 사람들에게는 위협적이고 모든 종류의 문제로 가득 차 있을 수 있습니다. 따라서 모든 종류의 심오하고 하드코어한 C++ 컴퓨터 과학 소프트웨어 작성 작업에서 시스템을 작동시키려는 업계 사람들을 보호할 수 있는 엔터티와 도구가 많이 있습니다.
"RR은 진입 장벽을 낮추려고 합니다."
Aparicio는 컴퓨터 언어 다양성의 또 다른 지지자입니다.
그는 “제조에 하나의 언어만 있을 것이라고 말하는 것은 비현실적이라고 생각하지만, 여러 언어가 있을 경우(장단점은 모두) 통역사 역할을 하는 소프트웨어 형태의 게이트웨이가 필요하다”고 말했다.
Aparicio는 자동화 시스템, 시뮬레이터, 클라우드 플랫폼 및 로봇(ROS-I에 의해 제어됨) 간의 상호 운용성 및 통신을 위한 플러그 앤 플레이, 오픈 소스 소프트웨어를 만드는 ARM 연구소 자금 지원 프로젝트의 수석 연구원입니다.
게이트웨이는 제조 분야에서 널리 사용되는 세 가지 표준 및 프로토콜인 OPC-UA, MTConnect 및 DDS와 함께 작동합니다.
이 프로젝트에 Siemens 및 Southwest Research Institute와 함께 소프트웨어 회사인 Real Time Innovations와 로봇 공급업체인 Keba 및 Yaskawa가 있습니다.
Aparicio는 "결국 비밀 소스는 이러한 모든 기계가 서로 통신하고 ... 상호 운용하고 ... 이러한 모든 저수준 통신을 추상화하여 선택한 언어로 프로그래밍할 수 있도록 하는 방법"이라고 말했습니다.
새로운 공작 기계와 공장 장치는 연결 및 상호 운용성을 위해 장착되어 있으며 소유자는 Aparicio, Wen 및 Robinson이 하고 있는 작업을 강력하게 활용할 수 있어야 합니다.
하지만 레거시 시스템은 어떻습니까?
Robinson은 "일반적으로 네트워크 카드가 있고 기존 인터넷을 통한 정보 이동을 지원할 수 있다면 우리는 할 수 있습니다."라고 말했습니다.
10년 정도 된 일부 레거시 로봇도 공장 창고에 먼지를 모으는 대신 작업에 투입될 수 있습니다.
로빈슨은 “만약 10년 된 로봇이 있다면 그 시점에서는 본질적으로 무료 자산이기 때문에 일부 소프트웨어를 활용하여 센서를 추가하는 것뿐입니다.”라고 말했습니다. “좋은 내부 팀이 없는 한 계약 파트너와 협력해야 할 수도 있지만 처음부터 완전히 새로운 시스템을 구입하는 것보다 훨씬 더 낮은 [비용으로] 가동할 수 있습니다.
"투자 수익은 매우 매력적입니다."
ARM 연구소에서 자금을 지원하는 프로젝트에 모든 전문 지식과 노력을 투입하고 성공적인 결과를 얻었음에도 불구하고 미국 제조업이 완전한 상호 운용성과 연결 가능성에 도달하도록 돕기 위해 해야 할 일이 여전히 많이 있습니다.
더 많은 참가자를 위한 공간도 있습니다.
“이것은 아는 사람이 많을수록 좋은 프로젝트입니다. 우리는 점점 더 많은 회사가 참여하기를 원합니다.”라고 Aparicio가 말했습니다. “우리가 문제를 완전히 해결하는 것은 아닙니다. 우리는 작은 장애물을 해결하고 있습니다. 더 큰 문제를 해결하는 데 필요한 몇 가지 추가 프로젝트가 있을 것입니다.
Wen은 프로젝트 결과에 대해 "모두가 이것을 원합니다."라고 말했습니다.
ARM(Advanced Robotics for Manufacturing) 연구소에서 자금을 지원하는 기술 개발 프로젝트 중 일부는 ROS-Industrial 소프트웨어 내의 많은 콘텐츠를 활용하여 기능을 강화하고 일반 산업용으로 개발된 모듈을 이상적으로 강화합니다.

ROS-Industrial의 기본 소프트웨어 코드인 ROS의 역사는 실리콘 밸리에 뿌리를 두고 있습니다.
ROS 코드는 구글의 핵심 소프트웨어 아키텍트인 실리콘 밸리의 억만장자이자 창업자인 스콧 하산(Scott Hassan)이 이끄는 윌로우 개러지(Willow Garage)에서 일하는 팀이 개발했다고 그의 후속 회사인 적당한 테크놀로지스의 웹사이트에 게시된 약력에 따르면. ROS, 현재 ROS2는 현재 비영리 Open Robotics에서 개발 및 유지 관리하고 있습니다.
일반적으로 사용되는 이름인 ROS는 "로봇 운영 체제"의 약어이지만 기능이 부족합니다.
“ROS는 프로세스 관리 및 스케줄링이라는 전통적인 의미의 운영 체제가 아닙니다. 오히려 호스트 운영 체제 위에 구조화된 통신 계층을 제공합니다… ,” Willow Garage 웹사이트의 ROS 개요에 따르면
자동화 제어 시스템
산업 자동화는 컴퓨터나 로봇과 같은 제어 시스템과 정보 기술을 인간을 대체하기 위해 산업에서 다양한 프로세스와 기계를 처리합니다. 산업화의 범위에서 기계화를 넘어선 두 번째 단계입니다. 제조 공정의 품질 및 유연성 향상 이전에 자동화의 목적은 생산성을 높이고(자동화 시스템은 하루 24시간 작동할 수 있기 때문에) 인간 작업자와 관련된 비용(예:임금 및 수당)을 줄이는 것이었습니다. 그러나 오늘날 자동화의 초점은 제조 공정의 품질과 유연성 향상으로 이동했습니다. 자동차 산업에서 엔진에 피스톤을 장착하는 작업은 1~1.5%의 오류율로
완전 자동화된 치즈 브라인 시스템 완전 자동화된 치즈 브라인 시스템을 기대할 수 있습니다. 위의 그림과 같이 버그가 있는 마지막으로 떠오를 수 있는 것은 산업 자동화입니다. Amish 커뮤니티 한가운데 있는 치즈 공장에 설치된 OEM(Original Equipment Manufacturer)과 함께 완전 자동화된 치즈 브리닝 프로젝트에 참여하기 전까지는 그 말이 사실이었습니다. 이것은 경쟁력을 유지하기 위해 자동화해야 한다는 것을 알고 있는 현명한 미래 지향적인 비즈니스 소유자의 예입니다. 이 투자를 통해 프로세스를 소등 상태로