

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
| |
|




RC 자동차는 해킹하는 것이 정말 재미있고 로봇을 만들기 위해 저렴한 가격에 좋은 섀시를 제공하지만 만들 하나를 선택하는 것은 수백만 유형의 재에서 골치 아픈 일입니다. 제 동생이 얼마전에 생일이였는데 정말 멋진걸 주고싶어서 결국 이 rc카를 줬습니다. RC 자동차 해킹도 쉽고 어렵습니다. RC 자동차가 만들어지는 방식이 다르기 때문에 자동차를 해킹하는 쉽고 정의된 방법을 만들지는 못하지만 이 해킹은 보편적입니다. 또한 각 모듈 뒤에 있는 모든 부분과 이론에 대한 기본 사항을 다루려고 노력할 것입니다. 우리는 모듈을 사용했지만 pro mini를 제외하고 회로를 만드는 것이 좋습니다.
프로미니가 너무 작아서 정말 불편했는데 재밌었어요.
동영상을 확인하고 다음 동영상을 구독하십시오.
1단계:올바른 섀시 얻기



부품 목록
<울>적절한 섀시 구입
섀시를 선택하는 것은 드라이브 메커니즘에 대한 질문입니다. 많은 드라이브 메커니즘이 있습니다.
가장 인기 있는 두 가지 메커니즘에 대해 이야기해 보겠습니다.
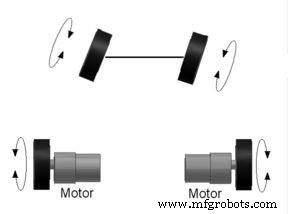
차동 드라이브 차동 드라이브란 무엇입니까?
차동이라는 용어는 두 엔티티 간의 차이를 의미하며 로봇 공학의 맥락에서 두 모터 간의 속도 차이일 뿐입니다. 이 속도 차이를 기반으로 로봇은 2D 레이아웃에서 임의의 방향으로 이동할 수 있습니다.
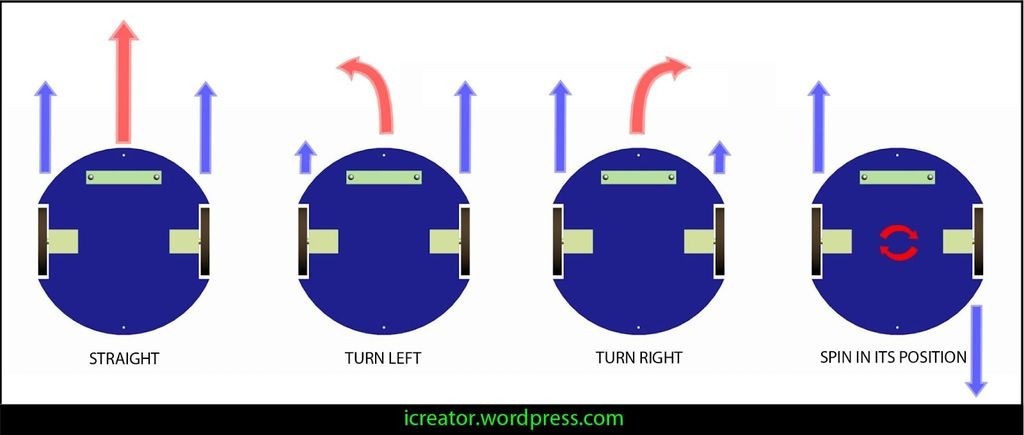
두 개의 모터가 한 줄로 바퀴에 연결되면 서로 반대 방향(한 쌍의 바퀴가 하나의 축에 연결된 것처럼)이 각 모터의 회전 속도에 따라 운동 방향이 결정됩니다. 두 바퀴가 같은 속도로 회전할 때 모터 간의 차이는 0입니다. 이렇게 하면 로봇이 직선으로 앞으로 이동합니다. 두 모터의 회전 방향이 반대로 되어 있으면 로봇이 반대 방향으로 이동할 수 있습니다. 속도 차이가 0이면 다시 직선이 됩니다. 이제 한 모터의 속도를 변경하면 직선에서 멀어지는 방향으로 이동하게 됩니다. 예를 들어, 오른쪽 모터의 속도를 줄이면 속도 차이가 발생하여 방향이 변경됩니다. 결과적으로 로봇이 우회전하는 힘이 발생합니다. 이 방향 변경은 모터의 속도를 더 줄임으로써 필요한 각도로 제어할 수 있습니다. 오른쪽 모터가 느릴수록, 오른쪽으로 회전할수록 날카로워집니다. 이것은 좌회전의 경우와 정확히 동일합니다.
결론적으로, 느린 오른쪽 모터, 더 날카로운 우회전. 더 느린 왼쪽 모터 더 날카로운 좌회전. 다음은 차동 구동 메커니즘의 작동을 설명하는 몇 가지 시나리오입니다. M1과 M2는 각각 좌우 바퀴를 구동하는 모터입니다.
스티어 타입 드라이브
조향형 드라이브란 무엇입니까?
자동차 드라이브는 현실 세계에서 가장 일반적이지만 로봇 세계에서는 그렇지 않습니다. 한 쌍의 구동 바퀴와 별도의 한 쌍의 핸들이 특징이며 병진 및 회전은 서로 독립적입니다. 그러나 변환과 회전은 서로 연결되어 있으므로 이 시스템은 심각한 경로 계획 문제에 직면해 있습니다. 네 바퀴는 세 바퀴나 두 바퀴보다 더 효율적입니다. 4개의 바퀴 중 처음 2개는 조종하는 데 사용되고 다음 2개는 로봇을 구동하는 데 사용할 수 있습니다. 4륜 로봇의 균형은 결코 문제가 되지 않습니다. 우리가 사용하는 대부분의 일상적인 자동차는 4륜이며 그 존재와 능력을 입증하기에 충분합니다.
자동차형 드라이브의 단점 :회전 메커니즘을 정확하게 제어해야 합니다. 약간의 부정확성으로 인해 큰 오도메트리 오류가 발생할 수 있습니다. 시스템이 Non – Holonomic이므로 경로 계획이 매우 어렵고 부정확합니다. 직접적인 방향 액추에이터가 없습니다.
따라서 단순하고 사용하기 쉽기 때문에 차동 드라이브를 사용하는 것이 좋습니다.
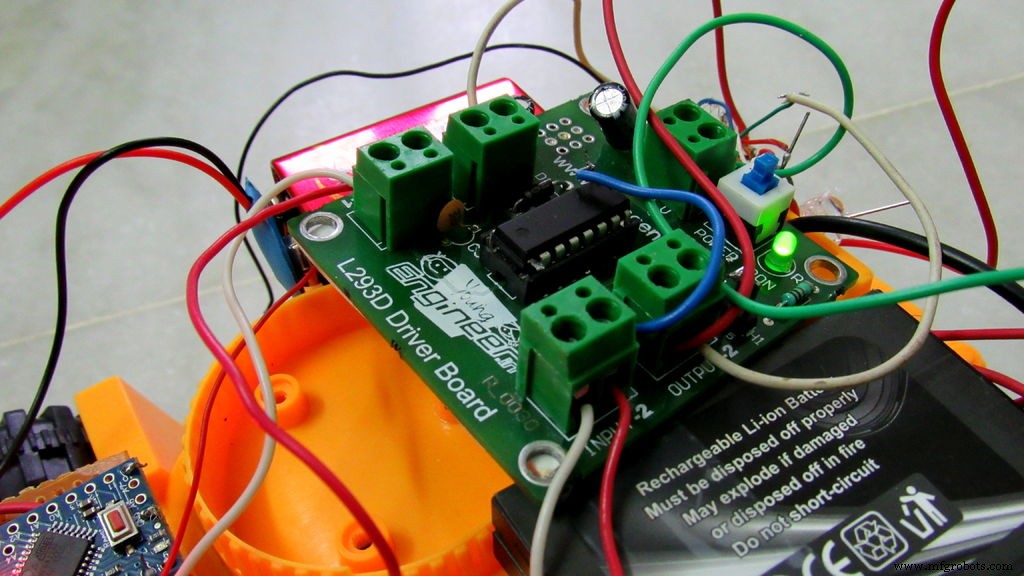
2단계:모터 제어
모터를 제어하려면 모터 드라이버라는 것이 필요합니다.
모터 드라이버란 무엇입니까?
모터 드라이버는 작은 전류 증폭기입니다. 모터 드라이버의 기능은 저전류 제어 신호를 받아 모터를 구동할 수 있는 더 높은 전류 신호로 바꾸는 것입니다.
l293d 모터 드라이버 모듈을 사용하고 있는 모터 드라이버가 많이 있습니다.
L293D는 양방향으로 회전하는 DC 모터를 구동하는 데 사용되는 모터 드라이버 집적 회로입니다. 2개의 DC 모터 세트를 동시에 제어할 수 있는 16핀 IC입니다. L293D는 자체 전원으로 5V를 사용하며 모터를 구동하려면 외부 전원이 필요하며 최대 36V이고 최대 600mA를 소비할 수 있습니다. L293D는 고전압이 양방향으로 흐를 수 있도록 하는 회로인 일반적인 H-브리지의 개념에서 작동합니다. 단일 L293D IC에는 2개의 DC 모터를 독립적으로 회전할 수 있는 2개의 H 브리지 회로가 있습니다.
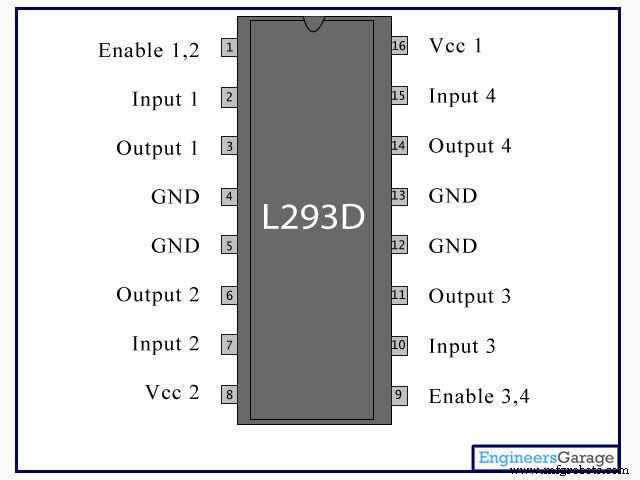
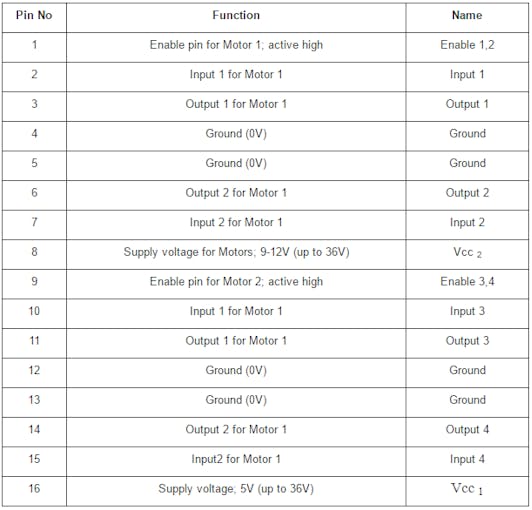
L293d의 핀 설명
1모터 1용 활성화 핀; 활성 높음 활성화 1,2 2 모터 1의 입력 1 입력 1 3 모터 1의 출력 1 출력 1 4 접지(0V) 접지 5 접지(0V) 접지 6 모터 1의 출력 2 출력 2 7 모터 1의 입력 2 입력 2 8 모터의 공급 전압; 9-12V(최대 36V) Vcc 2 9 모터 2용 활성화 핀; 활성 하이 활성화 3,4 10 모터 1 입력 3의 입력 1 11 모터 1 출력 3의 출력 1 12 접지(0V) 접지 13 접지(0V) 접지 14 모터 1 출력 4의 출력 2 15 모터 1 입력 4의 입력2 16 전원 전압; 5V(최대 36V) Vcc 1
3단계:앱 정보
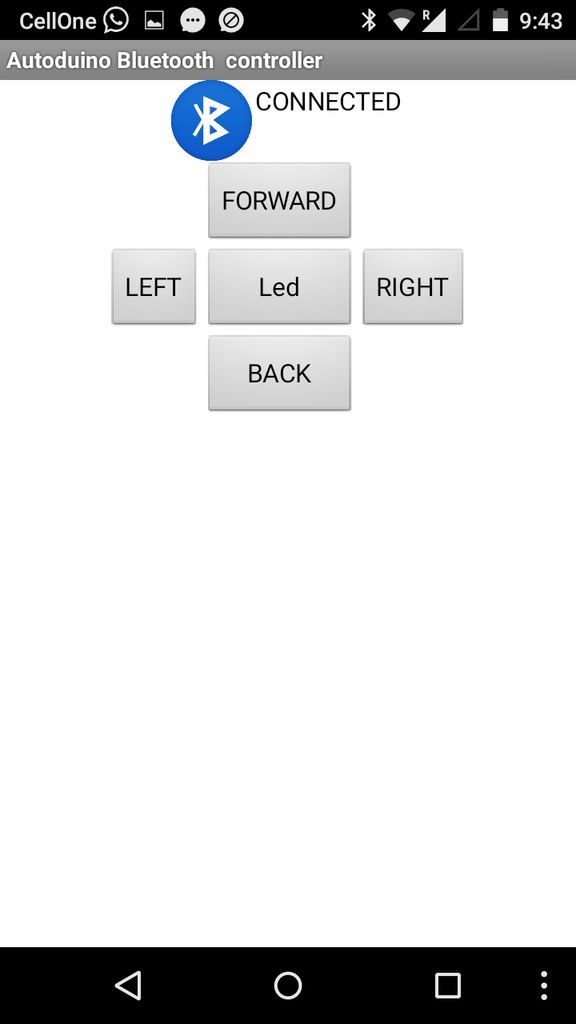


하나의 앱으로 제어할 수 있는 앱이 많이 있습니다. 로직은 매우 간단합니다. 블루투스를 통해 버튼을 누르면 모든 버튼이 문자를 보내고 arduino에서 처리합니다.
문자 기능
X Null 상태 F 앞으로 이동 B 뒤로 이동 L 좌회전 R 우회전
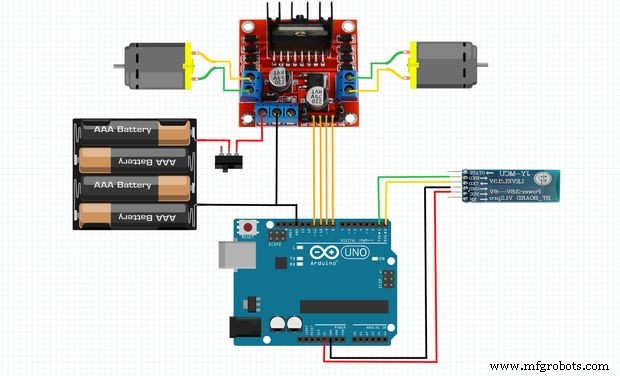
4단계:모든 부품 연결
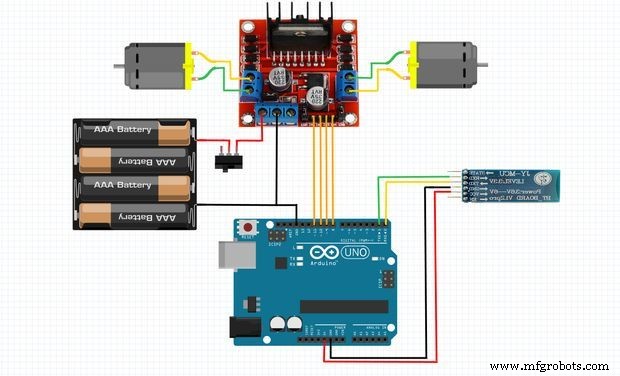

연결이 간단합니다.
다음과 같이 연결됩니다.
블루투스 모듈
Hc-05 Arduino Vcc 5v Gnd Gnd Rx Tx Tx Rx
모터 드라이버
모터 드라이버 Arduino 핀 2 8 핀 7 7 핀 10 6 핀 4 9 핀 3 및 6 모터 1 핀 11 및 핀 14 모터 2 핀 1 5v 핀 9 5v
5단계:코딩


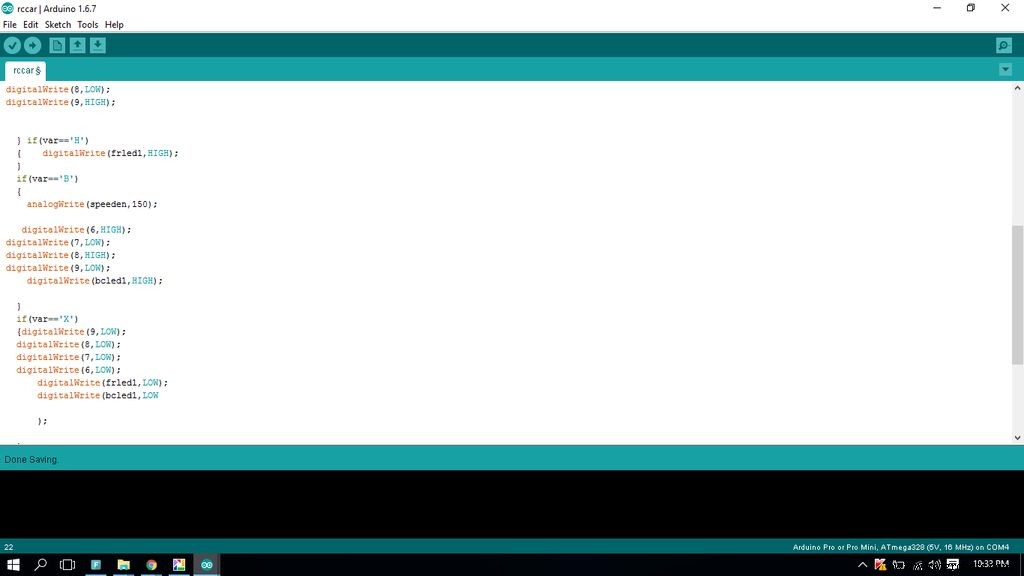
void setup() {Serial.begin(9600);pinMode(8, OUTPUT);pinMode(7, OUTPUT);pinMode(9, OUTPUT);pinMode(6, OUTPUT); 핀모드(5, 출력); 핀모드(4, 출력); 디지털 쓰기(4,LOW); digitalWrite(5,LOW);}// 루프 함수는 계속해서 실행됩니다.forevervoid loop() {var=Serial.read();if(var=='F'){digitalWrite(6,LOW);digitalWrite( 7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH);} if(var=='H'){ digitalWrite(frled1,HIGH);}if(var=='B'){ analogWrite( 속도를 내라,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); digitalWrite(bcled1,HIGH);}if(var=='X'){digitalWrite(9,LOW);digitalWrite(8,LOW);digitalWrite(7,LOW);digitalWrite(6,LOW); 디지털 쓰기(frled1,LOW); digitalWrite(bcled1,LOW);}if(var=='L'){digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW);}if(var =='R'){digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);;}} 내가 한 것처럼 프로젝트를 즐겁게 만드시기 바랍니다. 곧 더 멋진 프로젝트를 게시할 예정이니 팔로우하여 모든 업데이트를 받아보세요. 내 페이지도 좋아요 https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
녹색 모래 주조 과정 보기 금속 주물에는 여러 가지 유형이 있지만 가장 일반적으로 사용되는 유형은 모래 주물입니다. 프로세스는 믿을 수 없을 정도로 간단합니다. 원하는 금속 항목의 복제물을 주조 모래에 밀어 넣어 대상의 속이 빈 음화를 만듭니다. 그 빈 공간은 용융 금속으로 채워져 세부 사항을 포착합니다. 보이드가 식으면 모래에서 금속 물체를 끌어내 원래 디자인을 충실하게 포착합니다. 복잡한 모래성이나 모래 조각을 만든 사람이라면 누구나 모래가 작은 디자인을 잘 포착할 수 있다는 경험이 있습니다. 모래는 유연할 뿐만 아니라
소개: Mac이 갑자기 응답을 멈췄습니까? 켜지지 않습니까? 전혀 향상되지 않습니까? 글쎄, Mac은 문제에 면역되지 않습니다. 그러나 Mac을 다시 실행하는 방법을 알아낼 수 있습니다. 몇 가지 간단한 단계를 통해 Mac 또는 MacBook을 시작하는 방법을 알아보십시오. 1.Mac에 전원이 공급되는지 확인 먼저 가장 먼저(이것은 매우 분명합니다) Mac에 전원이 있는지 확인하십시오. Mac 배터리를 연결하면 소모되거나 손상될 수 있습니다. 어댑터도 손상될 가능성이 항상 있습니다. 여유 공간이 있는 경우 다른 전원 케이블을