

제조공정

산업 제조
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
SnowPlow Robot을 만들고 싶었던 이유는? 생활을 편하게 해주는 솔루션에 둔감한 편이 아니라서 사람들이 겨울의 추운 기온과 전통적인 수동 삽을 사용하는 피로를 피할 수 있는 솔루션을 만들고 제안하는 아이디어를 고려했습니다. 보도에서 눈을 제거하십시오. 이를 위해 저는 재미있고 기술적인 것을 선택했습니다. 이런 식으로 강력한 역학, 제어 전자 장치 및 강력한 전기 모터를 갖춘 원격 제어 Snowplow 로봇 개발을 시작하기로 결정했습니다. 그 결과 애벌레, 전동 블레이드(올리고 이동할 수 있음) 및 상단에 장착된 조명 프로젝터가 있는 실제 제설기의 미니어처 버전으로 어둠 속에서 길을 밝혀줍니다. 로봇은 PlayStation 리모컨으로 원격 제어할 수 있습니다.
다음 비디오에서 제설차 로봇이 작동하는 것을 볼 수 있습니다. 누군가 제설차 로봇이 삽질을 하기 위해 준비를 해야 하는 것 같다고 말했습니다. 그렇지 않습니다 , 눈이 제거되는 모습을 영상으로 만들어 봤습니다.
어떻게 만들어지나요?
로봇은 전동 블레이드(올리고 이동할 수 있음)를 지지하는 프레임과 전기 모터, 바퀴 및 궤도 트랙으로 구성된 견인 시스템으로 구성됩니다. 섀시는 함께 용접된 직사각형 섹션 철봉으로 실현됩니다. 로봇의 크기는 블레이드를 제외하고 600X375X240mm, 무게는 약 30kg이다.
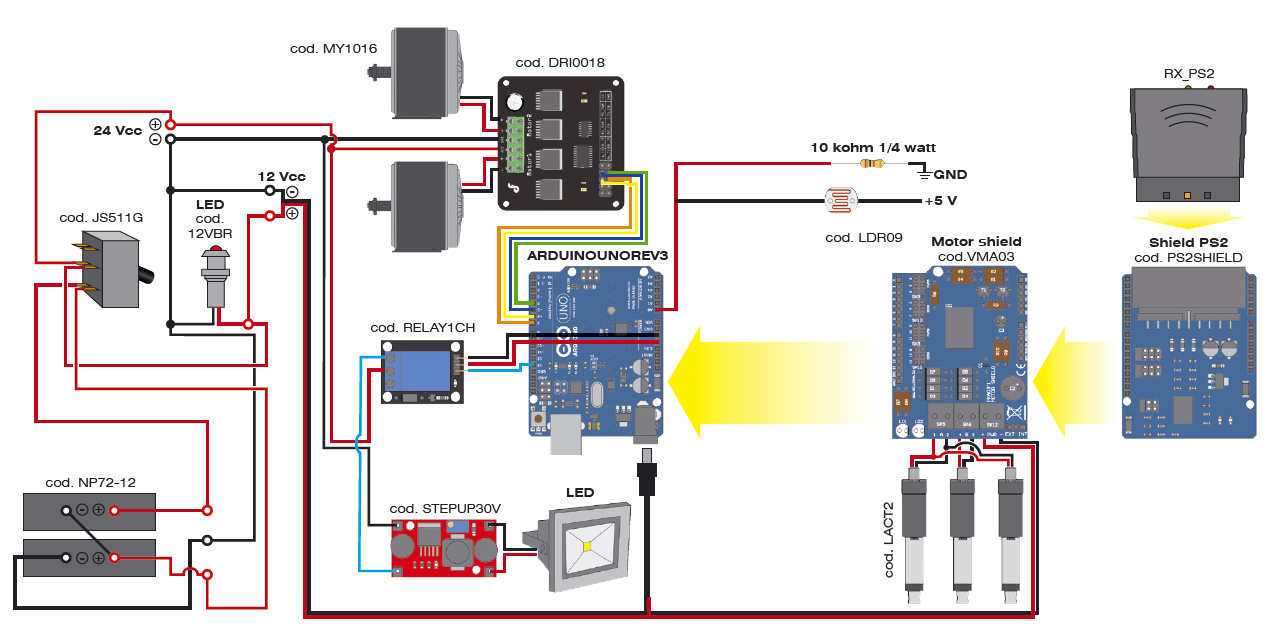

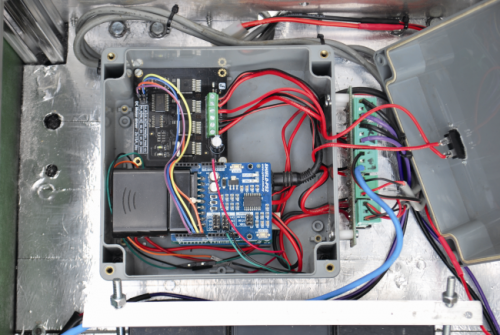
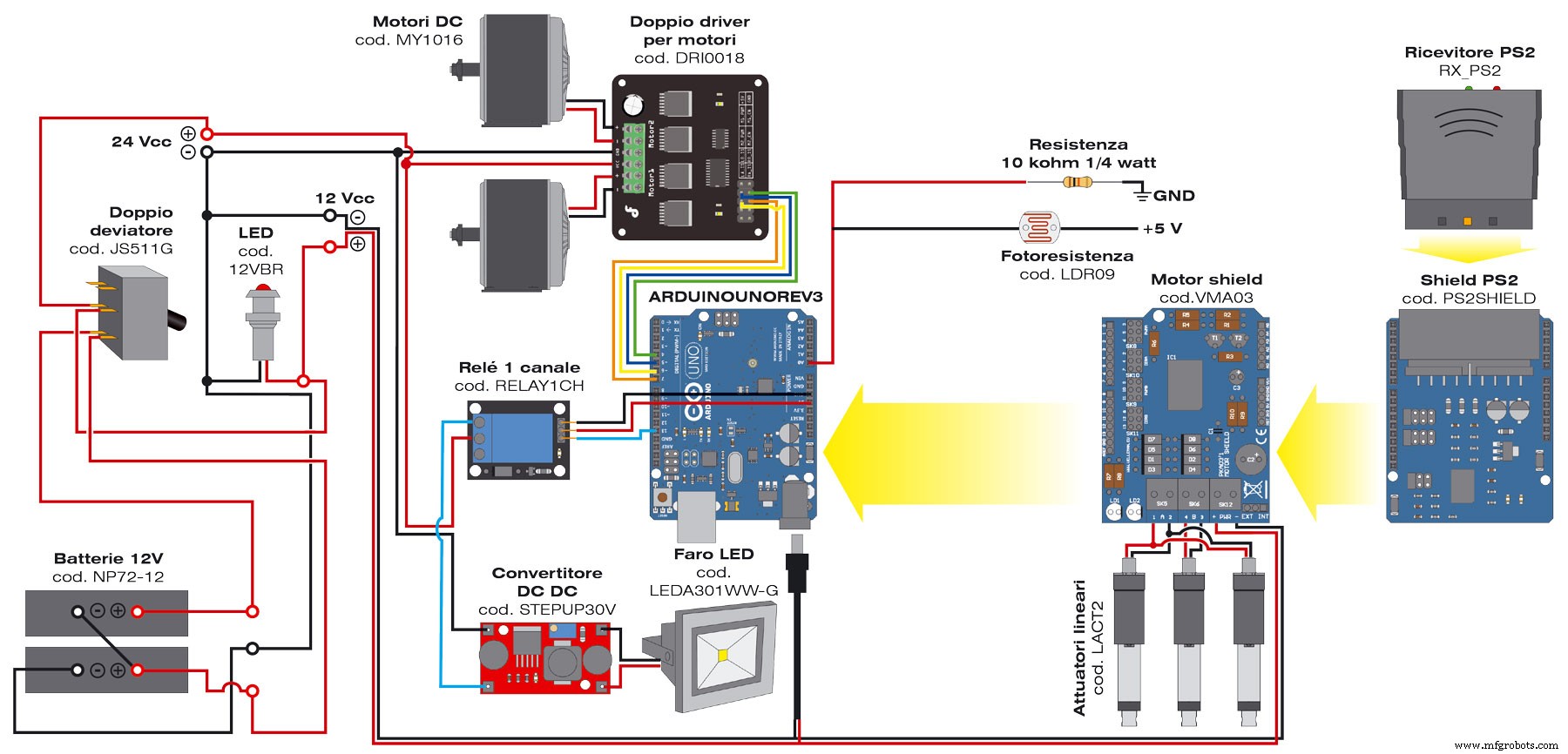
제설기의 전기 및 전자 부품은 Arduino Uno를 기반으로 하며 3개의 실드를 호스팅하고 다음과 인터페이스합니다.
<울>Arduino에 장착된 쉴드는 블레이드의 움직임을 관리하는 3개의 선형 모터를 제어하는 모터 쉴드와 PlayStation 2(PS2)와 인터페이스할 수 있는 PS2SHIELD입니다. 후자는 앞서 언급한 콘솔에서 특정 명령을 송수신하기 위한 2.4GHz 무선 수신기인 RX-PS2가 필요합니다. 로봇의 배선도는 이 페이지에서 찾을 수 있는 것입니다. 전원은 7.2Ah의 두 개의 납 젤 배터리 시리즈로 만들어집니다. 두 개의 중간 지점 연결에서 12V를 가져오고 직렬의 음극과 양극 사이에서 24V를 사용합니다. 스위치(125V, 2×15 암페어)는 2개의 공급 라인을 제어합니다. 12볼트를 사용하여 핀 스트립을 통해 실드에 전원을 공급하는 Arduino를 실행합니다. Arduino가 실행 중일 때 LED(내부적으로 제한 저항 장착)가 표시됩니다.
배터리 스택에서 직접 12볼트가 모터 실드의 전원 섹션에도 공급됩니다. 사실, 3개의 선형 액추에이터(cod. LACT2)의 흡수가 높기 때문에 Arduino에서 12V를 가져오는 것은 권장하지 않습니다. 적절한 PWR 단자에 제공되는 외부 전원 공급 장치를 선택합니다. 외부 전원 공급 장치를 사용하려면 터미널 근처, 중앙과 EXT 사이의 점퍼(실드에 있음)를 이동해야 합니다. 쉴드를 관리하려면 구성 요소와 함께 제공되는 Arduino용 특수 라이브러리가 필요합니다. 각 선형 액추에이터는 길이를 따라 샤프트를 앞뒤로 움직이기 위해 웜 나사를 사용하는 12Vdc 기어 모터로 구성됩니다(최대 5cm).
액추에이터의 동적 하중은 50kg이고 최대 속도는 1.3cm/s입니다. 움직이지 않을 때 약 250kg까지 지탱할 수 있으며, 토크가 있어 동력이 없는 상태에서도 샤프트의 위치를 유지한다. 2개의 리미트 스위치는 엔진이 최대 확장 및 수축에 도달할 때 엔진을 멈추게 하는 반면, 다이오드는 한계점에 도달한 후 역방향을 허용합니다. 액추에이터는 금속으로 만들어졌으며 먼지와 물로부터 보호하도록 밀봉되어 있습니다(IP63 등급).
이제 트랙션 및 프로젝터(옵션) 섹션인 제설기의 전원 부분에 전원을 공급하는 24볼트 공급 라인을 살펴보겠습니다. 첫 번째는 모터 드라이버를 기반으로 하며 4개의 와이어로 연결됩니다. 같은 수의 Arduino 디지털 라인. 모터 드라이버는 최대 35VDC의 전압과 15A(각각)의 전류로 2개의 브러시 모터를 연속적으로 구동할 수 있는 이중 브리지 전원 드라이버입니다.
Arduino와 인터페이스하고 4개의 디지털 I/O(2 PWM)만 사용하여 모터의 회전 방향과 속도를 선택할 수 있습니다. 회로에는 4개의 제어 핀, 모터의 회전 방향을 나타내는 4개의 LED, 보드 전원 공급 장치(5 Vdc)용 핀 2개 및 인쇄 회로 후면에 위치한 2개의 알루미늄 방열판이 있어 작동 중 발생하는 열을 발산하는 데 필요합니다. 최대 전력으로.
Arduino에 의한 드라이버 관리를 위해 제조업체는 특수 라이브러리를 제공합니다. 출력 단자 블록을 사용하면 단면이 1.5제곱미터 이상인 케이블을 사용하여 두 개의 엔진을 연결하여 다이어그램에 표시된 대로 연결할 수 있습니다(극성을 반전하지 마십시오. 그렇지 않으면 트랙이 반대로 실행됩니다!). 제어 입력에 관해서는 Arduino와 컨트롤러 커넥터 피치 2.54 사이의 연결을 존중해야 합니다. 제조사에서 제공하는 라이브러리와 당사 펌웨어를 사용할 때 필요한 통신:수정 시 연결을 수정해야 합니다.
DIR은 모터 회전 방향을 설정하는 논리 레벨이고 PWM은 전원 드라이버에 명령을 내리는 PWM 신호라는 것을 기억하십시오. 컨트롤러 커넥터 접점을 식별하려면 회로 기판의 구성 요소 측면에서 옆에 보이는 실크스크린을 참조하는 것으로 충분합니다. 엔진 컨트롤러 외에도 24볼트가 LED 프로젝터 섹션에 전원을 공급합니다. 장착할 수 있습니다. 장착된 경우 적절한 배선이 표시되고 릴레이 카드(코드 RELAY1CH)에서 양의 24V를 가져오는 것을 기억하십시오. 후자는 디지털 I/O 13을 통해 Arduino에 의해 제어되는 릴레이와 각각의 구동 트랜지스터를 수용합니다. Arduino는 또한 +5V 및 접지(GND)를 통해 카드에 전원을 공급합니다.
릴레이를 사용하면 해당 회로의 동작을 대상으로 프로젝터를 켜고 끌 수 있습니다. 프로젝터는 220 Vac에서 작동하도록 설계되었지만 이 전압은 로봇에서 사용할 수 없기 때문에 인버터 사용을 피하기 위해 프로젝터를 열고 AC/DC를 제거하고 전원 LED의 두 와이어를 직접 가져와 프로젝터를 수정했습니다. 변환기의 출력 DC / DC (cod. STEPUP30V); 후자는 조정 가능한 출력 전압이 있는 스위칭 컨버터로, LED에 약 10와트에서 작동하도록 하는 것과 같은 전류를 제공하기 위해 조정되어야 합니다. 일반적으로 이것은 약 30볼트에서 달성됩니다. 그러나 전력은 제품 VxI에 의해 주어진다는 것을 기억하십시오(V가 볼트이고 I가 암페어인 경우 전압에 의한 전류, 와트 단위는 얻어짐). 그런 다음 30V까지 전류 소비는 340mA 미만이어야 합니다. LED 그룹은 내부적으로 과전류로부터 보호되지만 STEPUP30V는 출력 전류 제한이 2A로 제한되어 있어 출력 전류 제한 기능이 있는 DC/DC로 교체하는 것이 유용할 수 있습니다.
리모콘에서 데이터를 수신하는 것은 쉴드 PS2SHIELD에서 수행하는 작업이며 제조업체에서 특정 라이브러리를 사용할 수 있도록 합니다. 실드는 명령의 수신 및 디코딩을 수행합니다. 라디오 부분은 관련 커넥터에 삽입되는 RX _PS2에 남습니다. 마지막으로 주목해야 할 것은 Arduino가 주변 조명을 감지하고 보드 RELAY1CH를 제어하여 LED 프로젝터가 켜지도록 하는 데 사용되는 포토레지스터입니다. 구성 요소는 10kOhm(1/4W)의 저항에 의해 전압 분배기에 공급되고 아날로그 입력 A0 Arduino에서 읽습니다. 5V는 Arduino 5V에서 가져옵니다. 이 광 센서는 간단한 일을 합니다. 좋은 조명 조건에서 포토 레지스터의 저항은 낮고 Arduino 마이크로 컨트롤러의 ADC가 읽는 전압은 낮고 릴레이 보드를 트리거하지 않습니다. 대신 어둠은 저항을 많이 증가시키고 ADC는 5볼트에 가까운 전압을 읽어 프로젝터를 켜게 합니다.
빌드 지침
퀵 가이드
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
제조공정
이 튜토리얼에서는 어떤 방향으로든 움직일 수 있는 Arduino Mecanum Wheels 로봇을 만드는 방법을 배울 것입니다. 로봇의 이러한 독특한 이동성은 메카넘 휠(Mecanum Wheels)이라는 특수한 유형의 바퀴를 사용하여 이루어집니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 저는 실제로 이 휠을 디자인하고 3D로 인쇄했습니다. 구매 비용이 조금 비쌀 수 있기 때문입니다. 그것들은 아주 잘 작동하고 나는 이 로봇 플랫폼을 운전하는 것이 매우 재미있다고 말해야 합니다. NRF24L01
이 튜토리얼에서는 Arduino hexapod를 구축하는 방법을 보여줍니다. 이름에서 알 수 있듯이 헥사포드에는 6개의 다리가 있지만 그 외에도 꼬리 또는 복부, 머리, 안테나, 하악 및 기능적인 눈도 있습니다. 이 모든 것이 헥사포드를 개미처럼 보이게 하므로 Arduino Ant Robot이라고도 부를 수 있습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 로봇을 제어하기 위해 맞춤형 Android 애플리케이션을 만들었습니다. 앱에는 4개의 버튼이 있어 로봇에게 전진 또는 후진, 좌회전 또는 우