

제조공정

산업 제조
<메인 클래스="사이트-메인" id="메인">
이 튜토리얼에서 우리는 로봇 그리퍼 메커니즘의 3D 모델의 PID 제어를 만드는 방법을 볼 것입니다. Simulink 모델은 두 개의 하위 시스템으로 구성됩니다. Simulink 블록을 사용하는 모델인 DC 모터 하위 시스템과 SimMechanics Link를 사용하여 Solidworks에서 가져온 3D 모델. 스텝 기능을 사용하여 DC 모터를 활성화하여 로봇 그리퍼를 구동하고 Simulink PID 블록을 사용하여 PID 매개변수를 자동으로 조정합니다.
다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다.
여기에서 예제에서 Simulink 모델을 다운로드하십시오.

다음 링크에서 로봇 그리퍼 메커니즘의 3D 모델을 찾아 다운로드하십시오.
<그림 클래스="wp-block-image">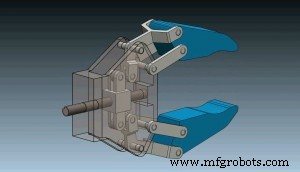
제조공정
로봇의 모델, 그리퍼 및 장착 옵션도 중요하지만 모든 것을 작동시키는 것은 실제로 로봇의 소프트웨어인 두뇌입니다. 팔레타이징 로봇 소프트웨어 개발은 대량으로 증가하는 로봇 수요를 충족하는 데 도움이 됩니다. 팔레타이징 로봇 소프트웨어는 작업 중 로봇이 수행하는 모든 작업을 제어합니다. 로봇이 팔레타이징할 화물을 픽업하는 시기, 이동 방법, 화물을 떨어뜨리는 위치 등을 제어합니다. 업계 최고의 팔레타이징 로봇 제조업체 중 하나인 Fanuc은 팔레타이징 애플리케이션을 최적화할 수 있는 iRvision 소프트웨어를 보유하고 있습니
자동차, 의료, 항공 우주 및 일반 산업을 위한 맞춤형 기계의 선두 제조업체인 DSC(Delta Sigma Corporation)는 로봇 공급업체가 필요했을 때 KUKA를 선택했습니다. DSC와 KUKA의 파트너십을 통해 KUKA의 모션 컨트롤 기술 플랫폼이 DSC의 맞춤형 6축 갠트리 디스펜싱 시스템의 제어 아키텍처가 되었습니다. KUKA의 Motion Control 기술이 선택된 이유는 배우고 프로그래밍하기 쉽고 작동하기 쉽기 때문입니다. 6축 갠트리 디스펜싱 시스템은 갠트리 로봇에 부착된 KUKA KR 16 로봇을 사용합니