

사물 인터넷 기술

산업 제조
로봇 공학의 미래가 배포됩니다. 모든 복잡한 로봇은 모듈과 시스템의 분산 세트로, 일부는 자율, 일부는 반자율, 일부는 인간이 제어하며 모두 밀접하게 작동하여 상호 운용되는 부품의 단일 응집 시스템을 형성합니다. 원격 로봇 공학에서 우리는 비디오와 상호 작용의 힘을 인간 조작자에게 다시 제공함으로써 로봇의 원격 조작을 가능하게 하고 조작자에게 로봇이 배치되는 위치에 대한 인간의 감각을 제공하려고 합니다.
ESA의 경우 이는 우주 또는 적대적인 행성 표면을 의미합니다. 인간 오퍼레이터는 우주 정거장에 있을 수도 있고 지구로 돌아올 수도 있습니다!
이를 위해 우리는 증강 현실 비디오와 결합된 오퍼레이터에 대한 햅틱 포스 피드백의 조합을 통해 텔레프레즌스를 활성화합니다.
사용자에게 시각 및 촉각 피드백을 모두 제공하면 텔레프레즌스가 가능합니다. 피드백이 더 현실적이고 정보가 많을수록 운영자의 텔레프레즌스 인식이 높아져 더 나은 원격 로봇 작동으로 이어집니다.
우주 원격 운용의 ESA에 대한 중요한 과제는 통신 링크입니다. 로봇에는 많은 실시간 제어 루프가 있지만 원격 조작 시스템에서 인간과 원격 로봇 사이의 제어 루프가 가장 문제입니다. 몇 가지 제어 루프는 가장 나쁜 통신 동작을 나타내는 패킷 교환 네트워크 링크를 통해 실행됩니다. 언제든지 연결이 끊길 수 있으며 대기 시간은 종종 몇 초 만에 측정될 수 있으며 매우 다양하며 패킷 손실이 정기적으로 발생합니다. 이것은 우주를 가로지르는 것처럼 인터넷을 통한 통신에서도 마찬가지입니다. 그러나 우리는 이 링크를 통해 모든 비디오를 보내야 하며, 시간은 로봇 제어 상태 및 양쪽 끝의 제어 명령과 상관 관계가 있습니다. 이는 링크 상태가 제어 루프의 필수적인 부분이 되어야 하며, 작업자가 적절하게 대응하고 원격 로봇이 안전하고 안정적인 상태를 유지할 수 있도록 양쪽 끝에서 사용할 수 있는 충분한 정보가 있어야 합니다. 링크 상태는 시스템 상태의 필수적인 부분이 되어야 합니다.
ESA의 개발 팀은 메카트로닉 엔지니어, 컴퓨터 비전 전문가, 제어 시스템 이론가 및 소수의 소프트웨어 엔지니어로 구성되어 있습니다. 초기 단계에서 우리는 특히 여러 대의 컴퓨터, 다양한 하드웨어 및 소프트웨어 플랫폼이 작동하는 복잡한 분산 시스템을 제공해야 하는 경우 시스템 요구 사항 및 인터페이스를 논의하기 위한 공통 방법을 찾아야 한다는 것이 분명했습니다. 우리는 데이터로 결정했습니다. 우리는 데이터를 시스템 상태를 이해하는 수단, 비디오 프레임을 표현하는 수단, 제어 이론을 표현하는 수단으로 생각합니다. 따라서 우리의 개발 환경과 시스템 개발에 데이터 중심적으로 접근하는 것이 합리적이었습니다. 원격 조작의 일부로 링크 상태를 이해해야 하는 중요한 필요성과 함께 우리는 불가피하게 DDS(데이터 배포 서비스)를 평가하게 되었습니다. NASA는 이미 우주 통신 시스템에서 DDS를 많이 사용하고 있었습니다. 그러나 DDS가 이러한 문제가 있는 링크를 통해 원격 조작을 가능하게 하여 실제로 가장 어려운 연결에 대한 실시간 제어를 가능하게 할 수 있습니까? 이것은 새로운 미개척 과학 영역이며 그 때문에 더욱 흥미진진합니다. 초기 징후는 매우 고무적입니다.
<그림 스타일="텍스트 정렬:센터;">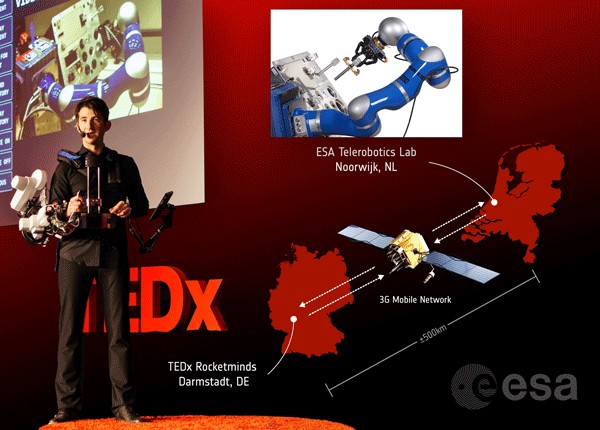
2014년 5월 TEDx RheinMain RocketMinds의 라이브 데모에서 저는 ESA Telerobotics에 물리적으로 위치한 로봇 팔을 원격으로 제어하기 위해 EXO-1 엑소-스켈레톤 팔 프로토타입을 사용했습니다. 500km 이상 떨어진 햅틱 연구실. 내 임무는 금속 핀을 집어 0.5mm 미만의 간격 허용 오차를 가진 구멍에 넣는 것이 었습니다. 계획된 3G 연결을 예기치 않게 사용할 수 없었기 때문에 전체 데모는 인터넷 기반 2G 전화 WAN 연결을 통해 실행되었습니다! 주머니에 전화기를 넣고 다니는 사람들로 가득 찬 폐쇄된 방에서 대역폭은 심각하게 제한되었고 실제로 우주에서 경험한 유형의 연결을 보여주거나 실제로는 훨씬 더 나쁩니다. 상당한 데이터 손실과 함께 15초 범위의 지연을 나타내는 링크를 통해 원격 작동하는 것보다 더 나빠질 수는 없습니다. 그럼에도 불구하고 2G 링크를 통해 실행되는 DDS는 햅틱 피드백, 로봇 팔 제어 루프 및 실험실의 로봇 팔 비디오에 대한 모든 통신을 처리할 수 있었습니다. 메인 TEDx 화면).
아직 우주에 있지는 않지만 원거리에 대한 정밀 원격 로봇 제어와 비전 및 햅틱 피드백을 통한 도전적인 데이터 링크는 말 그대로 우리가 이해할 수 있으며 우리는 이것을 광범위한 청중에게 시연했습니다. .
업데이트 :Haptics-1 실험은 NASA 우주비행사 Barry Wilmore에 의해 국제 우주 정거장에서 수행되었습니다. 첫 번째 사전 테스트는 2014년 12월 30일에 수행되었습니다. Haptics-1은 우주에서의 최초의 로봇 포스 피드백 실험입니다. 축하합니다! 더 읽어보기
우주에서 처음으로 #햅틱 피드백이 사용되었습니다! 오늘 @Space_Station#haptics-1이 성공적으로 진행되고 있습니다! pic.twitter.com/30zD5GzGqs
— ESATelerobotics(@ESATelerobotics) 2014년 12월 30일
공유하고 싶은 Connext DDS 사용에 대한 이야기가 있으면 blogadmin@rti.com으로 이메일을 보내주십시오.
사물 인터넷 기술
산업용 로봇이 1960년대에 Unimate와 함께 처음 데뷔했을 때 연구원들은 로봇의 미래에 대한 많은 가능성을 보았습니다. 수년에 걸쳐 이 로봇은 다른 모든 애플리케이션과 함께 페인트칠, 용접, 재료 취급 및 재료 제거가 가능한 기계로 발전했습니다. 이 새로운 세대의 연구원들은 로봇이 공장 외부의 세상을 도울 수 있는 방법을 찾기 위해 구세대의 로봇 공학에 주목합니다. 농업은 로봇 공학이 본격적으로 시작되는 분야 중 하나입니다. 농장에서의 로봇 응용 프로그램에 대한 가능성은 적절하지 않은 것처럼 보이지만 꽤 끝이 없습니다. 연구
파이프가 자동으로 스스로 고칠 수 있다면 어떨까요? 금이 가거나 부러지거나 옷이 날씨나 사용자가 하는 활동에 따라 변경될 수 있는 경우 ? 스스로 조립하는 가구, 성장에 적응하는 보철물... 이것들은 4D 프린팅 기술이 실현할 것으로 예상되는 응용 분야 중 일부에 불과합니다. 이미지 1:모양을 수정하는 4D 프린팅 발톱. 출처:Sculpteo. 3D 프린팅 거의 30년 동안 존재해 왔으며 여전히 연구 과정에 있는 동안 새로운 재료 및 응용 프로그램, 4D와 같은 새로운 기술이 등장했습니다. MIT 자가 조립 연구소에서 ,