

산업용 로봇

산업 제조
수제 제품을 자동화할 수 있나요?
수제 제품을 생각할 때 우리는 종종 각 조각이 반드시 고유해야 하는 매우 복잡한 맞춤형 제품을 상상합니다. 그러나 많은 제품이 완전 자동화를 사용하는 것을 보증할 만큼 생산량이 많지 않기 때문에 수작업으로 제작됩니다.
이 사례 연구에서는 산업용 플라스틱 연구 그룹이 로봇과 RoboDK를 사용하여 소량 생산 공정을 자동화하는 방법을 보여줍니다.
많은 자동화 형태의 문제는 높은 처리량으로 일관된 프로세스를 실행해야 한다는 것입니다. 이것이 없으면 투자 수익을 달성할 수 있을지 확신할 수 없으므로 자동화에 투자하는 것이 의미가 없는 경우가 많습니다.
소규모 배치 프로젝트가 있는 경우 자동화가 가능한지 궁금할 수 있습니다.
이것은 산업용 플라스틱의 한 연구원 그룹이 최신 로봇 프로젝트에서 해결한 문제입니다. 그들은 플라스틱 훌라후프 장난감 조립을 자동화할 수 있는 작고 비용 효율적인 방법을 찾고 있었습니다.
프랑스 회사 "Applications Thermoplastiques et Solutions Industrielles Innovantes"(ATS2i)의 연구원들이 이 프로젝트를 수행했습니다. 15년 넘게 산업용 플라스틱 분야에서 일해 온 엔지니어 Alexandre Temporel이 주도했습니다.
이 회사는 플라스틱 산업에 대한 구체적인 전문 지식을 바탕으로 혁신적인 산업 프로젝트의 설계 및 엔지니어링을 전문으로 합니다. 3D 프린팅, 기계 가공 및 CNC를 포함한 다양한 제조 기술을 통합합니다.

ATS2i는 연구 개발 및 타당성 연구에서 설계 및 프로토타입 제작에 이르기까지 산업 프로젝트의 전체 수명 주기에 걸친 프로젝트를 살펴봅니다.
회사로서의 범위 중 일부는 다른 사람들이 고급 자동화를 통해 기존 산업 기계를 현대화하도록 돕는 것입니다.
여기에서 훌라후프 로봇 프로젝트가 시작됩니다.
문제의 프로젝트에는 플라스틱 훌라후프 장난감 생산이 포함되었습니다. 이것은 작은 배치 크기가 필요한 많은 상황에서 일반적으로 수작업으로 수행되는 작업의 좋은 예입니다.
ATS2i 팀은 로봇 공학을 사용하여 훌라후프 생산의 조립 단계를 쉽게 자동화할 수 있는지 확인하기 위한 테스트로 설정을 만들었습니다.
훌라후프 장난감이 익숙하지 않다면 여기 입문서가 있습니다...
훌라후프는 2,500년 이상 동안 장난감으로 사용되었습니다. 후프를 사용하려면 허리, 팔다리 또는 목 주위를 돌립니다. 아이들은 게임용으로 사용하고 어른들은 운동이나 오락의 한 형태로 사용합니다. 훌라후프는 오랜 역사를 가지고 있지만 1950년대에 크게 인기를 얻었습니다.
대부분의 현대 훌라후프는 전통적으로 버드나무, 대나무 또는 뻣뻣한 풀로 만들어졌지만 플라스틱 튜브로 만들어졌습니다.

공학의 한 부분으로서 훌라후프는 만들기가 매우 간단합니다. 플라스틱 튜브는 원으로 구부러지고 끝은 함께 부착되며 일반적으로 양단 도웰 플러그를 삽입합니다.
훌라후프는 생산이 간단하지만 항상 대량으로 생산되는 것은 아닙니다. 대량 생산 버전과 달리 소규모 장인 제조사에서 소량으로 생산합니다.
후프의 끝을 함께 연결하는 작업은 자동화에 적합한 후보입니다.
이는 플라스틱 제조의 다른 영역에서 종종 요구되는 작업의 좋은 예입니다.
팀의 프로젝트에는 협동 로봇의 간단한 사용이 포함되었습니다. 그 결과 팀은 울타리나 안전 센서와 같은 추가 안전 조치 없이 작업장에서 작업을 수행했습니다.
설정 및 제조 과정은 상당히 간단했습니다.

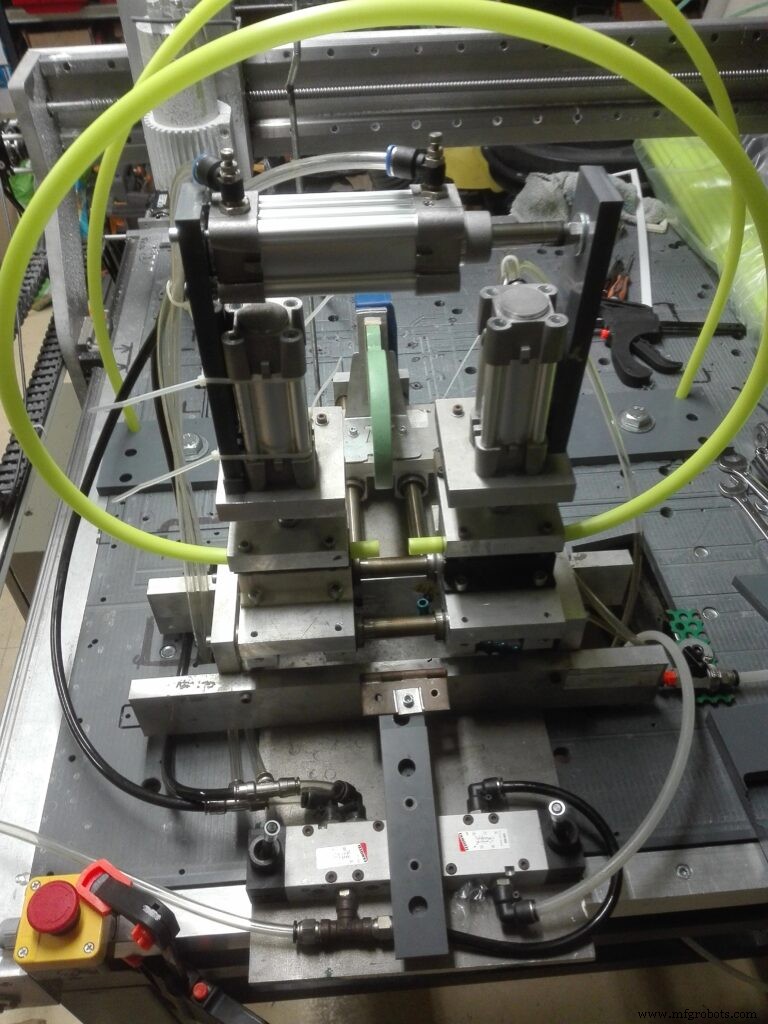
설정은 다음으로 구성되었습니다.
팀은 이러한 구성 요소를 탁상용 공간만 차지하는 단일 로봇 셀에 통합했습니다.
훌라후프를 만드는 과정에는 머신 텐딩(롤 벤더 관리) 및 조립 측면이 포함됩니다.
단계는 다음과 같습니다.
Alexandre Temporel과 그의 팀은 RoboDK를 사용하여 로봇을 프로그래밍하기로 결정했습니다. 이 소프트웨어는 UR 로봇과 기본적으로 호환되며 이와 같은 작업에 유용합니다.
그들은 먼저 소프트웨어 내에서 설정을 만들었습니다. RoboDK의 3D 모델 추가 기능 덕분에 롤 벤더 모델도 추가할 수 있었습니다. 덕분에 로봇을 기계에 올바르게 정렬하기가 더 쉬워졌습니다.
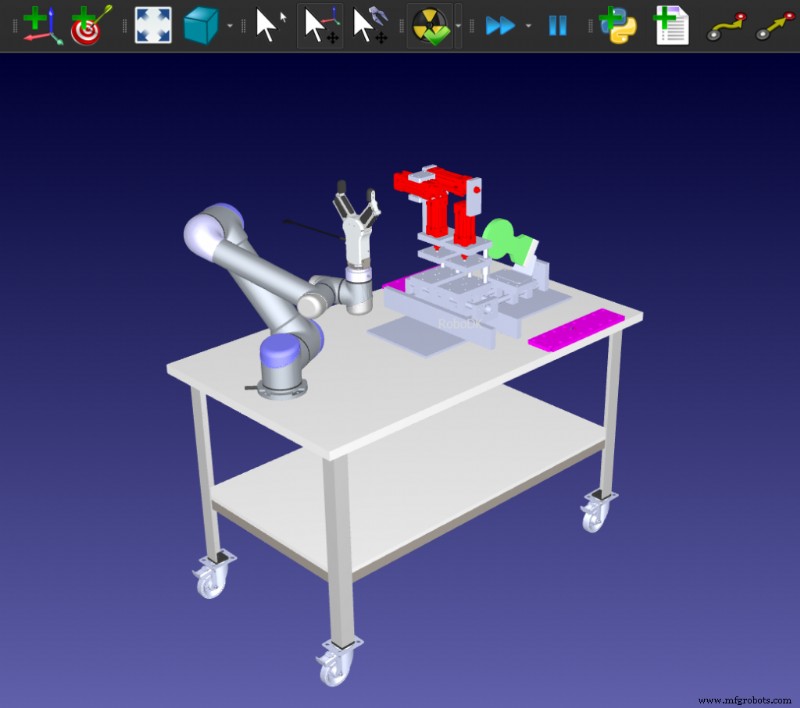
플라스틱 튜브의 유연한 특성을 감안할 때, 그들은 소프트웨어에서 훌라후프를 시뮬레이션하지 않는 것이 합리적이라고 결정했습니다. 그것은 시뮬레이션에 복잡성을 더할 뿐이며 좋은 프로그램을 만드는 데 불필요했습니다.
이 비디오에서 그들의 작업 결과를 볼 수 있습니다:
모든 것을 자동화할 필요 없이 프로세스에서 로봇을 활용하는 방법은 여러 가지가 있습니다.
ATS2i의 이 사례 연구는 배포하기 쉽고 소규모 배치 제조의 반복 작업을 덜어주는 애플리케이션의 좋은 예입니다.
로봇이 같은 상황에서 사람이 하는 것과 같은 일(예:롤 벤더 돌보기)을 하고 있기 때문에 제품이 본질적으로 수작업으로 남아 있다고 주장할 수도 있습니다.
자동화하고 싶은 소규모 배치 작업은 무엇입니까? 아래 댓글로 알려주거나 LinkedIn, Twitter, Facebook, Instagram 또는 RoboDK 포럼에서 토론에 참여하세요.
산업용 로봇
KUKA Robotics는 100년 이상 용접 및 기타 제조 솔루션을 혁신해 온 대기업 KUKA의 자회사입니다. KUKA는 유체 운동을 하는 강력한 로봇을 제작하는 것으로 유명합니다. KUKA KR 6도 예외는 아닙니다. 이 로봇은 다재다능하고 가벼운 구조로 오래 사용할 수 있도록 제작되었습니다. KR 6의 가장 좋은 점 중 하나는 적용 과정에서 부드러운 움직임을 유지하는 능력입니다. KR-6은 KUKA에 따르면 비용 효율적인 경량 소재로 제작되어 우수한 동적 성능과 높은 내진동성을 제공합니다. 진동에 대한 이러한 저항은 응용 프
RobotWorx는 생산을 개선하고자 하는 모든 회사를 위한 완벽한 자동화 솔루션을 제공합니다. 빠른 설정 및 통합을 위해 턴키 옵션을 사용할 수 있습니다. 턴키 시스템이 설정되고 응용 프로그램 및 생산 라인의 정확한 요구 사항에 맞게 프로그래밍되며 납품 후 즉시 고품질 제품을 출시할 준비가 됩니다. 턴키 시스템은 고객 및 애플리케이션에 따라 다르지만 생산 라인에서 작업을 완료하는 데 필요한 모든 것을 포함합니다. 여기에는 EOAT, 안전 패키지, 작업 셀, 전원 및 RobotWorx 밸류 패키지가 포함됩니다. 전체 작업 셀