

산업용 로봇

산업 제조
자재 취급은 오늘날 제조에 활용되는 가장 널리 퍼진 적용 공정 중 하나입니다. 많은 제조업체가 자재 취급 로봇 시스템을 사용하지만 일부는 한 스테이션에서 여러 작업을 수행하는 하나 또는 여러 로봇으로 구성된 자재 취급 작업셀로 이동하고 있습니다.
자재 취급 작업셀은 오늘날 시장에서 가장 다재다능한 작업셀 중 하나입니다. 용접 작업셀은 일반적으로 스폿 또는 아크 용접 응용 프로그램으로 제한되지만 자재 취급 작업셀은 사용 가능한 팔 끝 도구에 따라 12가지 다른 작업을 수행할 수 있습니다.
제조 효율성을 높이기 위한 노력의 일환으로 제조업체는 자재 취급을 위해 작업셀에 더 많은 관심을 기울이고 있습니다. 이러한 작업셀은 하나의 작업셀 내에서 여러 작업을 수행할 수 있습니다. 이러한 작업 셀 내에서 자재 취급자는 다른 로봇, CNC 기계 또는 심지어 인간 작업자와도 작업할 수 있습니다. 그들은 부품을 한 스테이션에서 주변에 위치한 다른 기계로 옮기는 데 사용할 수 있습니다. 또는 자재 취급 작업 셀 내의 조립 로봇에서 부품을 가져 와서 인간 작업자가 잡고 가져갈 수 있도록 턴테이블 또는 기타 포지셔너에 놓을 수 있습니다. 다음 지역으로.
자재 취급 작업을 위해 이러한 작업 셀을 함께 배치할 때 제조업체는 일반적으로 생산 레이아웃에서 많은 공간을 절약할 수 있습니다. 이러한 모든 기능을 하나의 작업 셀로 그룹화함으로써 제조업체는 바닥 공간을 절약하는 동시에 작업을 수행하기 위해 시설에서 다른 장비를 구입해야 하는 비용도 절약할 수 있습니다.
대체로 자재 취급을 위한 워크셀은 생산을 늘리고 장비와 인건비를 절감하여 제조업체의 시간과 비용을 절약하는 정확성, 속도 및 효율적인 제조의 보루입니다.
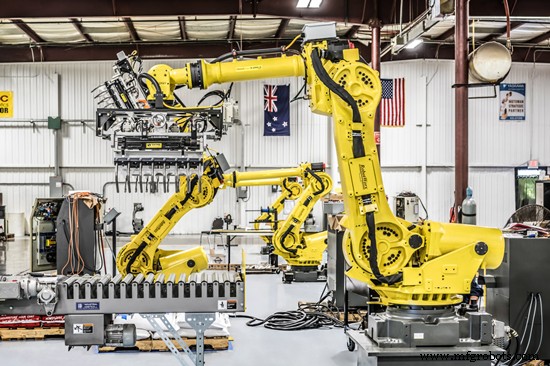
Fanuc, Motoman, ABB, Universal Robots 및 KUKA와 같은 여러 로봇 회사의 인증된 통합업체인 RobotWorx는 이러한 회사의 로봇으로 맞춤형 자재 취급 작업셀을 생산합니다. 픽 앤 플레이스를 수행하기 위한 Motoman 로봇 자재 처리 셀을 찾고 있든, 용접 후 자재를 처리하기 위한 Fanuc 셀을 찾고 있든 관계없이 RobotWorx는 적합한 셀을 구축할 수 있습니다. 귀하의 회사가 특수한 자재 취급 레이아웃을 찾고 있다면 RobotWorx 브랜드로 자체 제작한 제품도 있습니다.
산업용 로봇
작업자는 매일 작업장에서 재료와 제품을 취급합니다. 상자나 다른 물건을 들어 올릴 때 부상을 줄이기 위해 무거운 물건을 특정한 방식으로 들어 올리도록 주의해야 합니다. 다른 제품은 너무 크거나 모양이 어색하여 수동으로 들어 올릴 수 없습니다. 이러한 구속은 리프팅 프로세스를 늦추고 한 번에 수동으로 들어 올릴 수 있는 양(있는 경우)을 제한하여 로봇 자재 취급을 위한 완벽한 응용 프로그램이 되도록 합니다. 일부 시설에는 사람이 들어올릴 수 없는 더 큰 규모의 자재를 들어 올리기 위해 작동되는 지게차 또는 크레인이 있습니
자재 취급 로봇이 수행할 수 있는 기능은 다양하지만 가장 일반적인 세 가지 기능은 팔레타이징, 포장 및 부품 이송입니다. 많은 자재 취급 기능은 인간 작업자에게 지루하고 지루하며 시간이 많이 걸립니다. 무거운 물건을 들어올려야 할 수 있는 팔레타이징 및 부품 이송을 포함한 일부 작업도 부상을 유발할 수 있습니다. 한때는 사람이 단독으로 수행했던 이러한 애플리케이션은 이제 자재 취급 로봇 시스템으로 자동화되어 생산 속도와 안전 수준을 높이는 동시에 회사 비용을 절감하고 있습니다. 팔레타이징: 제조, 식품 가공 및 운송 산업에서는