

산업용 로봇

산업 제조
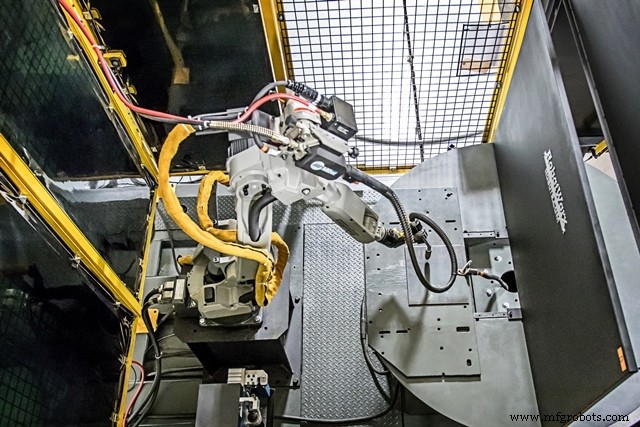
산업용 로봇은 1980년대부터 본격적으로 사용되었습니다. 그 시기에 제조업체는 용접, 재료 취급 및 재료 제거와 같은 프로세스를 자동화함으로써 애플리케이션 속도를 높이면서 비용을 절감할 수 있다는 것을 깨달았습니다. 그러한 모델 중 하나는 Fanuc M6iB/6S였습니다. 이 로봇은 자재 취급 응용 분야에서 효율적이지만 생산을 계속 진행하기 위해 해마다 돌아가는 내부 부품입니다.
M-6iB-6S 로봇의 모든 축에 있는 서보 모터(부품 번호 A06B-0202-B605 및 A06B-0223-B605)에는 로봇의 모든 부품에서 피드백을 받는 증폭기가 장착되어 있습니다. 이 피드백을 통해 모터는 로봇 작동에 가장 적합한 방식으로 재조정하고 움직일 수 있습니다.
M 6ib 6S의 또 다른 중요한 부분은 감속기 그룹(부품 번호 A97L-0218-0288 및 A97L-0218-0361)으로, 모터와 함께 작동하여 속도를 늦추고 모터의 출력 방향을 바꿀 수 있습니다. 이를 필요로 하는 로봇의 정확한 영역으로 전송하여 로봇의 전반적인 기능을 개선합니다.
마지막으로 M6ib6s의 손목 어셈블리인 부품 번호 A290-7215-T502입니다. 이것이 없으면 로봇은 본질적으로 쓸모가 없을 것입니다. 손목 어셈블리는 엔드 이펙터가 부착되는 곳입니다. 손목이 없으면 EOAT를 팔에 부착할 수 없으므로 로봇의 기능 의도를 잃게 됩니다.
이 모든 부품은 로봇의 기능에 매우 중요합니다. 로봇 시스템 자체를 포함한 이러한 부품은 RobotWorx 방대한 인벤토리를 통해 구입할 수 있습니다. 자세한 내용은 지금 온라인 또는 877-762-6881로 RobotWorx에 문의하십시오.
산업용 로봇
생산 라인이 중장비 자재 취급 작업의 처리량을 늘릴 준비가 되었으면 Fanuc M-900iB 시리즈의 로봇 통합을 고려하십시오. 이 시리즈의 6축 전기 서보 구동 로봇은 높은 속도와 큰 가반하중을 제공하도록 세심하게 제작되었습니다. Fanuc M-900iB 산업용 로봇 시리즈는 사용 가능한 다양한 모델로 다양한 자재 취급 애플리케이션을 자동화할 수 있는 기능을 사용자에게 제공합니다. Fanuc M-900iB/280은 J3 암의 강성이 향상된 견고하고 정밀한 로봇으로 최고의 정밀도를 제공합니다. 이 모델은 라우팅, 절단, 디버링 및
6축의 효율적인 성능과 강도를 갖춘 Fanuc M-710iC 로봇 시리즈는 생산 라인에 통합하는 것을 고려하고 싶은 로봇입니다. 귀하의 요구 사항이 무엇이든 M-710iC 시리즈의 로봇이 충족될 것이라고 확신할 수 있습니다. Severe Dust and Liquid Protection(옵션) 옵션을 사용하면 가장 가혹한 환경에서 이러한 로봇을 사용할 수 있으므로 작업이 남지 않습니다. 여기에서 M-710iC 시리즈의 다양한 모델을 볼 수 있습니다. Fanuc M-710iC/12L은 대형 부품을 용접하도록 설계된 이 다용도 로봇(3