

나노물질

산업 제조
살아있는 시스템에서 에너지 변환 및 에너지 수송은 분자 충전 및 방전에 의존합니다. 이 측면에서 가장 중요한 것은 엽록소와 헤모글로빈을 포함하는 포르피린 계열입니다. 이러한 분자의 전하 전이는 생명에 필수적입니다. 분자의 전하 전이는 또한 유기 전자 및 유기 광전지 장치에서 중요한 규칙을 담당합니다.
 분자가 충전되면 분자의 구조와 기능이 모두 변경됩니다. 분자가 전하를 띌 때 분자의 구조적 변화를 해결하면 이러한 기본적인 관계에 대한 이해가 향상됩니다.
분자가 충전되면 분자의 구조와 기능이 모두 변경됩니다. 분자가 전하를 띌 때 분자의 구조적 변화를 해결하면 이러한 기본적인 관계에 대한 이해가 향상됩니다.
제 IBM Research 동료와 저는 Universidade de Santiago de Compostela 및 ExxonMobil에서 CiQUS의 협력자들과 함께 피어 리뷰 저널 Science에 보고되었습니다. 우리는 포르피린의 모화합물인 포르핀을 포함하여 충전 시 개별 분자의 구조적 변화를 전례 없는 해상도로 해결할 수 있었습니다. 이 새로운 이해는 생물학이 에너지를 변환하고 전달하는 방법과 관련된 분자 전하-기능 관계의 일부 신비를 풀어줍니다.
10년 전, 동료들과 나는 원자 분해능으로 분자 구조를 해석하는 기술을 개발했으며(Science 325, 1110, 2009) 나중에 분자의 결합 강도를 조사하는 감도를 입증했습니다(Science 337, 1326, 2012). . 이미징 해상도를 개선하기 위한 우리의 트릭은 단일 일산화탄소(CO) 분자로 저온 원자간력 현미경의 팁을 기능화하는 것이었습니다. 수년에 걸쳐 우리는 분자의 전하 상태를 제어하기 위해 이 기술을 발전시켰고 전하 누출을 배제하기 위해 절연체를 씌웠습니다(Nature Comm. 6, 8353, 2015). AFM 팁과 샘플 사이에 전압을 인가하면 분자의 전자 수를 제어할 수 있습니다.
작년에 제 동료인 Shadi Fatayer와 저는 이전 작업을 결합하는 방법에 대해 생각했습니다. 즉, CO 팁을 사용하여 초고해상도로 분자를 이미징하면서 동시에 전하를 제어합니다. 새로운 간행물에서 우리는 이 목표가 어떻게 달성되었는지 보여주고 다양한 영역에서 중요한 여러 분자의 전하 상태를 조사하여 무엇을 배울 수 있는지 보여줍니다.
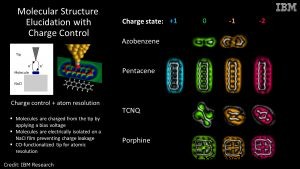
먼저, 잘 알려진 분자 스위치(아조벤젠)를 조사하여 흡착 기하 구조의 변화를 해결할 수 있음을 보여주었습니다. 분자의 두 평면 그룹은 중성일 때 평행했습니다. 우리는 전자가 부착될 때 서로에 대해 기울어져 분자를 음으로 하전한다는 것을 발견했습니다.
다음으로, 우리는 개별 결합의 강도에서 전하로 인한 변화에 초점을 맞추었습니다. 이것은 작은 효과이며 우리는 모델 화합물(펜타센)을 선택하여 해결할 수 있는지 확인했습니다. 우리는 이 모델 분자를 양전하에서 이중 음전하까지 4가지 다른 전하 상태로 조작할 수 있습니다. 우리는 분자 내의 어떤 결합이 더 강해지고 어떤 결합이 전하를 변화시킬 때 더 약해지는지를 해결했습니다. 이 모델 시스템에서 다양한 충전 상태에서 촬영한 이미지를 비교하는 방법을 배웠습니다.
그런 다음 우리 방법을 분자(TCNQ)에 적용했습니다. 이 분자는 전하 수용체로 자주 사용되며 전하 상태의 함수로 평면 외 왜곡과 결합 강도의 변화를 모두 해결합니다. 놀랍게도 이 분자는 중성일 때 일어서고 음수 또는 이중 음수일 때 표면에 눕습니다. 음전하 상태에서 이중 음전하 상태로 증가된 중심 분자 고리의 방향족성을 관찰할 수 있습니다.
마지막으로, 그리고 아마도 우리가 조사한 가장 흥미로운 분자는 엽록소와 헤모글로빈의 모화합물인 포르핀입니다. 이러한 분자가 접합 경로를 변경하는 방법은 논란의 여지가 있으며 기능을 이해하는 것이 매우 중요합니다. 처음으로 우리는 세 가지 다른 전하 상태에서 포르핀의 접합 경로와 방향성의 변화를 시각화할 수 있었습니다.
우리의 새로운 기술을 통해 우리는 전하가 분자의 구조와 기능을 어떻게 변화시키는지에 대한 이해를 높일 수 있으며, 이는 생물체의 광전환 및 에너지 전달과 같은 여러 면에서 매우 중요합니다.
<시간 />
전하 상태 제어를 통한 분자 구조 설명 , 과학, Shadi Fatayer, Florian Albrecht, Yunlong Zhang, Darius Urbonas, Diego Peña, Nikolaj Moll, Leo Gross, DOI:10.1126/science.aax5895
이 프로젝트는 유럽 연구 위원회 통합자 보조금 'AMSEL'(계약 번호 682144), Agencia Estatal de Investigación(MAT2016-78293-C6-3-R), Xunta de Galicia(Centro singular deInvestigación de Galicia)의 지원을 받았습니다. , 인증 2016–2019, ED431G/09) 및 유럽 지역 개발 기금.
나노물질
로봇이 수행할 수 있는 작업의 범위는 매년 빠르게 확장되고 있습니다. 지난 수십 년 동안 로봇은 인간에게 위험하거나 지루하거나 피곤한 많은 프로세스에서 육체 노동자를 대체했습니다. 자동화는 육체 노동에 비해 제조업체의 정밀도, 속도 및 효율성을 향상시킬 수 있습니다. 산업용 로봇은 무거운 물체 들어 올리기, 화학 물질 취급, 도장 및 조립 작업 수행과 같은 반복적이거나 위험한 작업에 이상적입니다. 그들은 자동차 및 제조 산업에서 발견됩니다. 산업용 로봇의 첫 번째 유형은 데카르트/갠트리 로봇입니다. 3개의 조인트가 있는 암이 장착
지원 타워를 사용하면 산업 및 제조 회사가 수직 및 수평으로 작업할 수 있습니다. 지지탑은 일반적인 곤충 및 습기 위험을 줄이기 위해 벌크 식품을 들어올릴 수 있습니다. 제품을 트럭에서 창고로 옮기거나 직원이 현장에서 접근하기 어려운 위치에 도달하도록 도울 수 있습니다. 지원 타워는 효율성과 품질 보증을 개선하기 위해 대규모 시설에서 다양한 용도로 사용할 수 있습니다. 일반적인 지원 타워 및 용도 많은 산업에서 지원 타워를 사용하여 현장 프로세스를 간소화합니다. 예를 들어 농업 산업에서는 타워를 사용하여 곡물을 운송 및 저장하고