

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 2 | |||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
|
소개
어느 좋은 날, 나는 체중계로 내 몸의 무게를 쟀다. 갑자기 '지구의 질량은 얼마나 될까요?'라는 생각이 떠올랐습니다. '어떻게 측정할 수 있습니까?'는 따로 남겨두세요. 지구를 놓을 수 있는 그런 무게 저울은 없습니다. 지구의 질량을 측정하는 간접적인 방법이 있어야 합니다. 여기에서는 지구의 질량을 측정하는 간접적인 방법 중 하나의 구현을 제시합니다.
1단계:간접 방법
19세기 초 과학자들은 뉴턴의 두 번째 법칙과 뉴턴의 만유인력 법칙을 사용하여 지구의 질량을 측정했습니다. 이 방정식은 각각 F =ma 및 F=(GmM)/(r^2)입니다(m=물체의 질량, a=가속도, G=중력 상수, M=지구의 질량, r=지구 반지름) . 예를 들어 'a' 가속도 항을 중력으로 인한 가속으로 대체하고 이 두 방정식을 결합하면 다음을 얻습니다.
mg =GmM/r^2
이 방정식은 M 즉 지구의 질량에 대해 풀 수 있습니다.
M =(gr^2)/G.
<그림>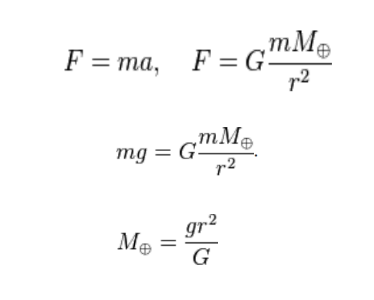
우리는 G와 r의 값을 알고 있다고 가정합니다. 우리는 arduino와 몇 개의 센서를 포함하는 작은 실험을 사용하여 중력으로 인한 가속도를 찾을 것입니다. 마지막으로 M의 가치를 찾기 위해 모든 것을 합칠 것입니다.
적절한 수학적 표현은 첨부된 이미지를 참조하세요.
실험을 시작해 보겠습니다.
2단계:실험 개요
(아두이노가 곧 시작될 예정입니다. 여기에서 약간의 수학을 참고하세요)
중력에 의한 가속도를 결정하기 위해서는 '자유낙하'라는 것을 알아야 합니다. 그것은 물체/물체가 중력의 힘에 의해서만 지구를 향해 아래로 움직이는 운동입니다. 이제 이 자유낙하를 특징짓는 과학 용어가 거의 없습니다. 초기 속도, 최종 속도, 이동 거리, 비행 시간 및 가속도입니다.
<울>이제 다음과 같은 뉴턴 방정식 중 하나가 있습니다. -
이동 거리 =(초기 속도 * 비행 시간) + (가속도 * (비행 시간)^2)/2
위 방정식에는 '가속'이라는 변수를 포함하여 4개의 변수가 있습니다. 이 4개의 변수 중 3개를 알면 나머지 4번째 미지의 변수를 계산할 수 있습니다.
그 중 2개를 고칠 수 있습니다
<울>2개의 알 수 없는 변수가 남았습니다. 여기에서 arduino가 시작되어 비행 시간을 찾는 데 도움이 됩니다. 비행 시간을 정확하게 결정하려면 1. 비행 시작 및 2. 비행 종료 두 개의 타임스탬프가 필요합니다.
우리는 4단계에서 이 두 타임스탬프를 결정하기 위해 맞춤 회로를 만들 것입니다. 저는 비행 시작과 5단계에서 비행 종료를 위한 타임스탬프를 찾는 회로를 설명합니다.
arduino와 몇 가지 센서의 도움으로 비행 시간을 계산하고 위의 방정식에서 미지수인 중력 가속도(bingoooo!!!) 하나만 남깁니다.
방정식을 더 단순화하기 위해 위에서 언급한 방정식에 고정 변수 값을 넣습니다.
1 =(g * (비행 시간)^2)/2
그래서
g =2 / (비행 시간)^2
실험에 대한 세부정보는 7단계에서 이어집니다.
의심되는 경우 첨부된 이미지를 참조하십시오.
<그림>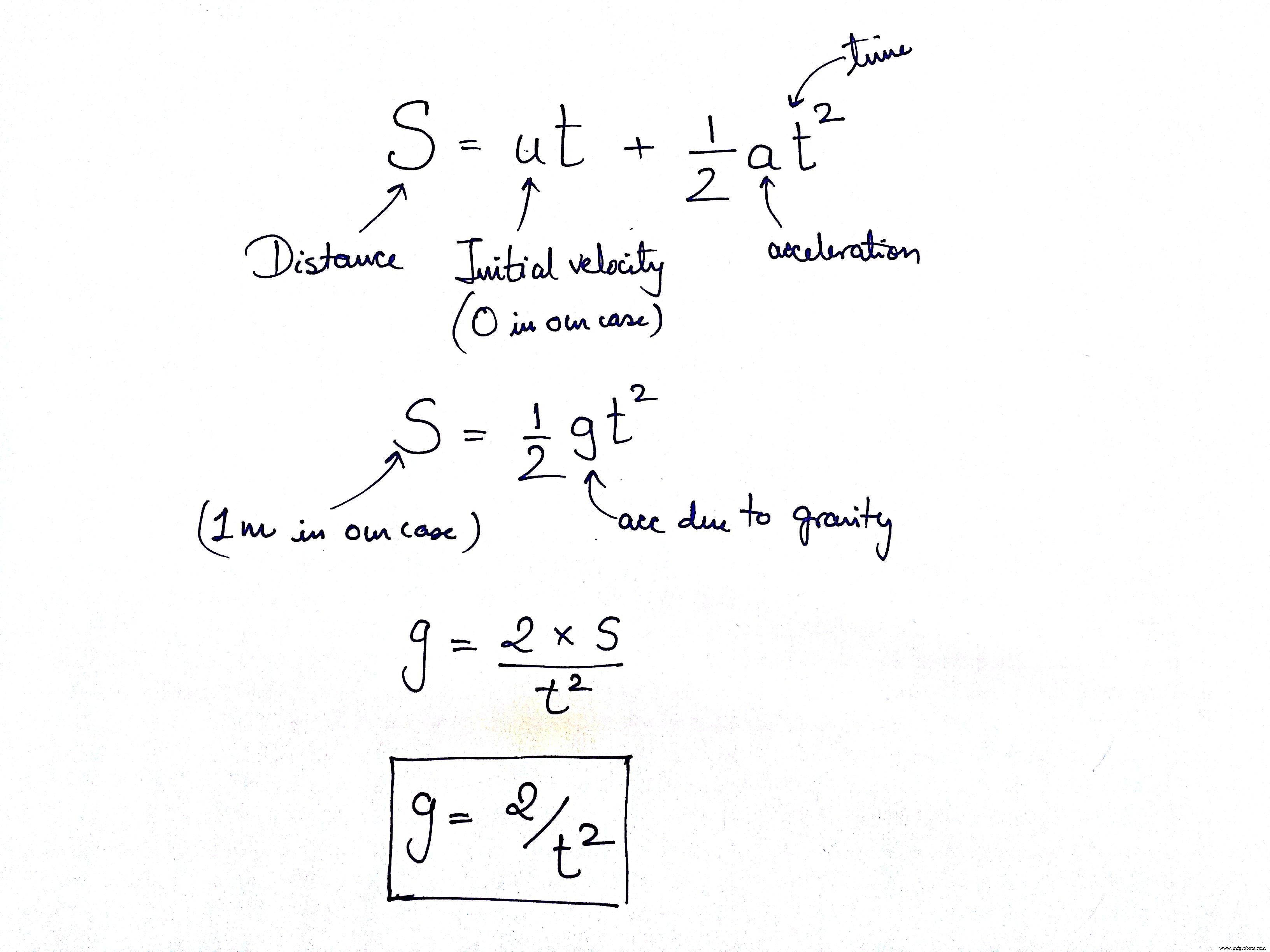
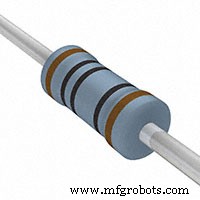
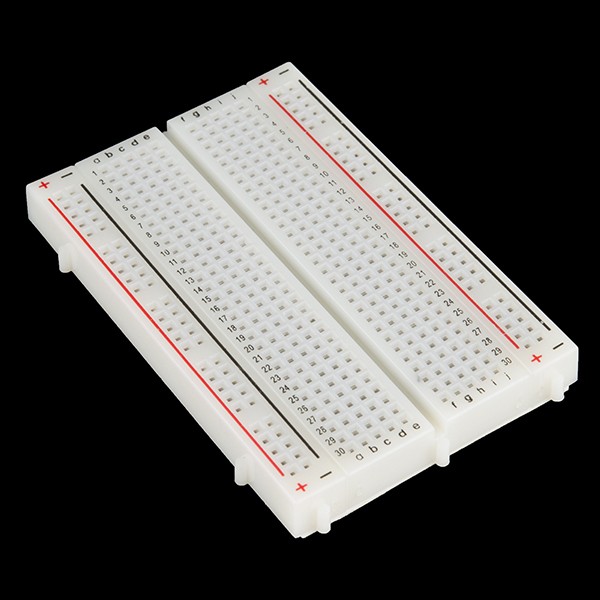
3단계:필요한 것
다음은 중력 가속도를 측정하기 위한 실험에 필요한 목록입니다.
<울>의심이 가는 경우 첨부된 이미지를 확인하십시오.
<그림> <그림>
<그림>  <그림>
<그림>  <그림>
<그림>  <그림>
<그림>  <그림>
<그림> 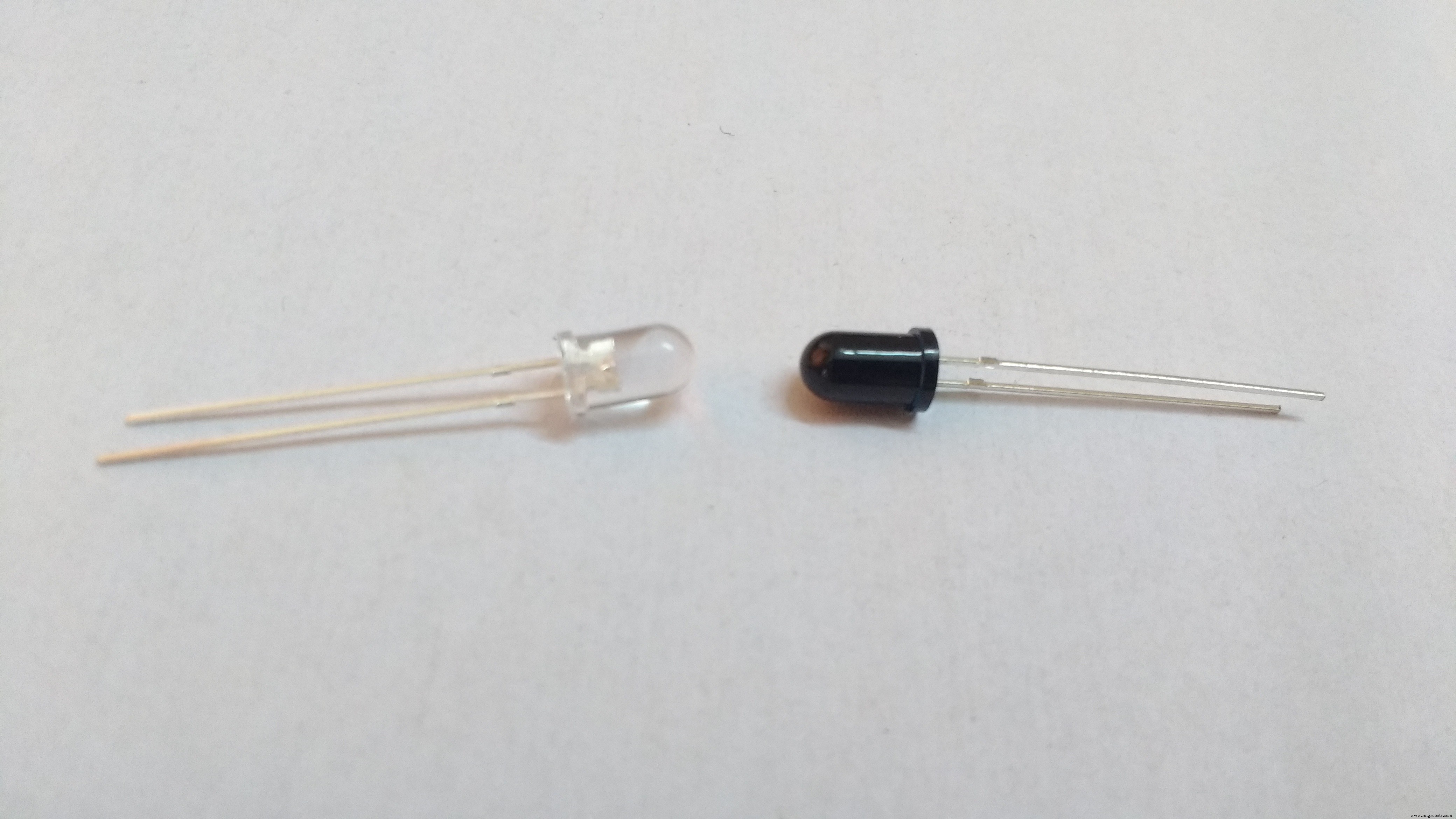 <그림>
<그림>  <그림>
<그림>  <그림>
<그림> 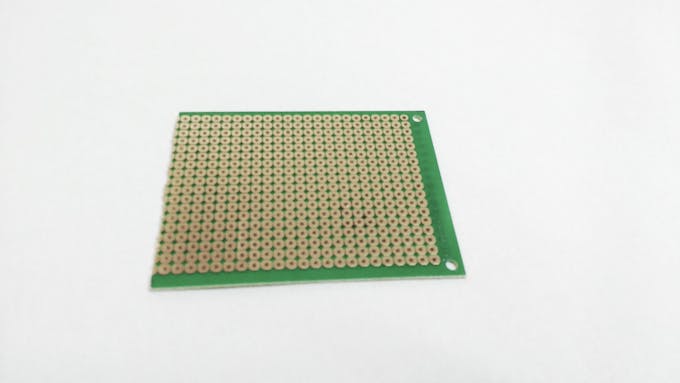 <그림>
<그림> 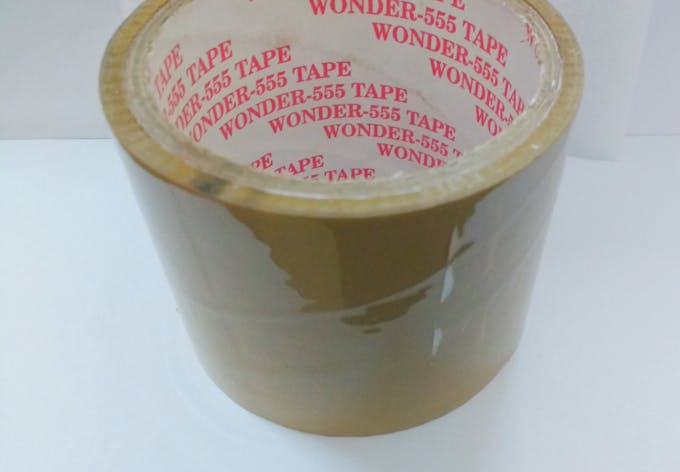 <그림>
<그림>  <그림>
<그림>  <그림>
<그림>  <그림>
<그림>  <그림>
<그림> 
4단계:회로도 1:IR 회로
이 회로는 'g'를 측정하는 데 사용되는 물체에 대한 자유 낙하 시작 시간을 타임스탬프하는 데 사용됩니다. 다음은 첨부된 fritzing 도식 이미지에 대한 중요 사항입니다.
<울>개미가 의심되는 경우 동영상(시간=5분 16초)을 참조하세요.
5단계:회로도 2:압전 회로
이 회로는 'g'를 측정하는 데 사용되는 물체의 자유낙하 종료 시간을 타임스탬프로 표시하는 데 사용됩니다. 다음은 첨부된 fritzing 도식 이미지에 대한 중요 사항입니다.
<울>의심되는 경우 첨부된 동영상을 참조하십시오(시간 =9m 2초).
6단계:정리하기
다음 지침에 따라 정리하세요.
<울>헷갈리시면 첨부된 이미지를 보시면 조립이 이해가 쉽도록 알맞게 표기되어 있습니다.
<그림>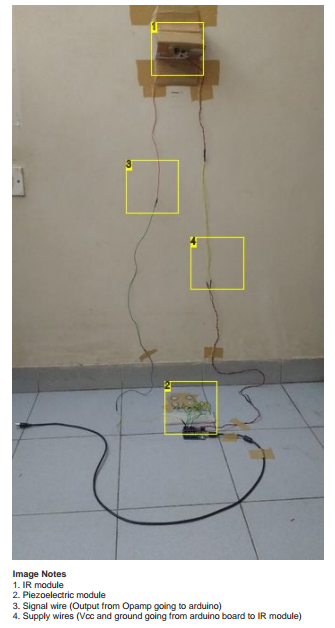
7단계:실험 세부정보
모든 것이 준비된 상태에서(8단계에서 논의한 Arduino 코드 제외) 이 실험의 절차를 진행해 보겠습니다.
<울> <그림>
<그림> 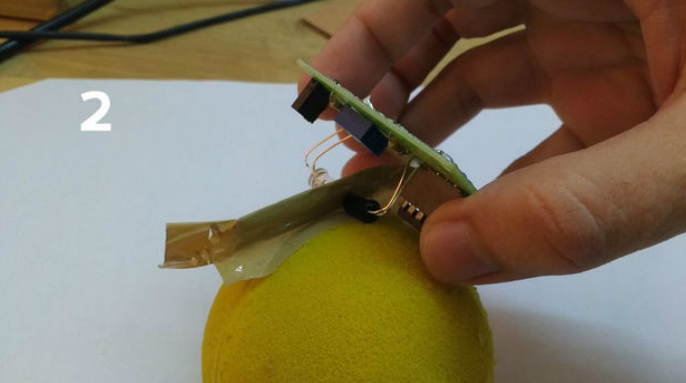
8단계:Arduino 코드
이 실험을 위한 Arduino 코드를 첨부합니다. 코드는 정말 간단합니다. 의심이 가는 경우 코드를 자세히 설명하는 동영상을 참조하세요(동영상 시간 =13분 35초).
9단계:실험하기
이 실험을 하기 전에 다음 사항에 주의해야 합니다.
<울>여기 첨부된 영상의 타임스탬프 17분에 이 실험을 하고 있습니다. 이 실험에서 얻은 비행 시간과 같은 결과를 사용하여 지구의 질량을 계산합니다.
10단계:지구의 결과 및 질량
이 실험을 3번 반복한 후 Time of Flight 측면에서 다음과 같은 결과를 얻었습니다.
<울>평균을 구합시다.
평균 비행 시간 =450ms
중력 가속도를 얻기 위해 방정식에서 이 값을 대입하면 가속도는 약 9.8755m/s2가 됩니다. 첨부된 이미지와 같이
마지막으로 이 'g' 값을 지구의 질량으로 대체하면 첨부된 이미지에서 볼 수 있듯이 약 6.0066 x 1024Kg이 됩니다.
Google에 따른 지구의 실제 질량은 5.972 x 1024 Kg입니다. 가까워진 것 같아요.
시간을 내주셔서 감사합니다. 의심스러운 점이 있으면 동영상을 참조하거나 댓글에 남겨주세요. 기꺼이 도와드리겠습니다.
<그림>
const int sensorPin1 =A0; const int sensorPin2 =A1; const int sensorPin3 =A2; const int sensorPin4 =A3; const int photoPin =4; const int ledPin =13; const int threshold =110; char stringToPrint [100];int startTime,endTime;int val1,val2,val3,val4;void setup() { Serial.begin(115200); // 여기에 설정 코드를 넣어 한 번 실행합니다. pinMode(ledPin,OUTPUT); 핀모드(센서핀1,입력); 핀모드(센서핀2,입력); 핀모드(센서핀3,입력); 핀모드(센서핀4,입력); pinMode(photoPin,INPUT);}void loop() { // 여기에 기본 코드를 넣어 반복적으로 실행합니다. int start =digitalRead(photoPin); 시작 시간 =밀리(); if(시작 ==HIGH) digitalWrite(ledPin, HIGH); 동안(시작 ==LOW) { digitalWrite(ledPin, LOW); val1 =analogRead(sensorPin1); val2 =analogRead(sensorPin2); val3 =analogRead(sensorPin3); val4 =analogRead(sensorPin4); //sprintf(stringToPrint,"%d,%d,%d,%d",val1,val2,val3,val4); //Serial.println(stringToPrint); if((val1>=임계값) || (val2>=임계값) || (val3>=임계값) || (val4>=임계값)) { endTime =millis(); sprintf(stringToPrint,"%dms",endTime - 시작시간); Serial.println(문자열 인쇄); 디지털 쓰기(LED 핀, 높음); 지연(1000); 디지털 쓰기(LED핀,낮음); 시작 =높음; } }} 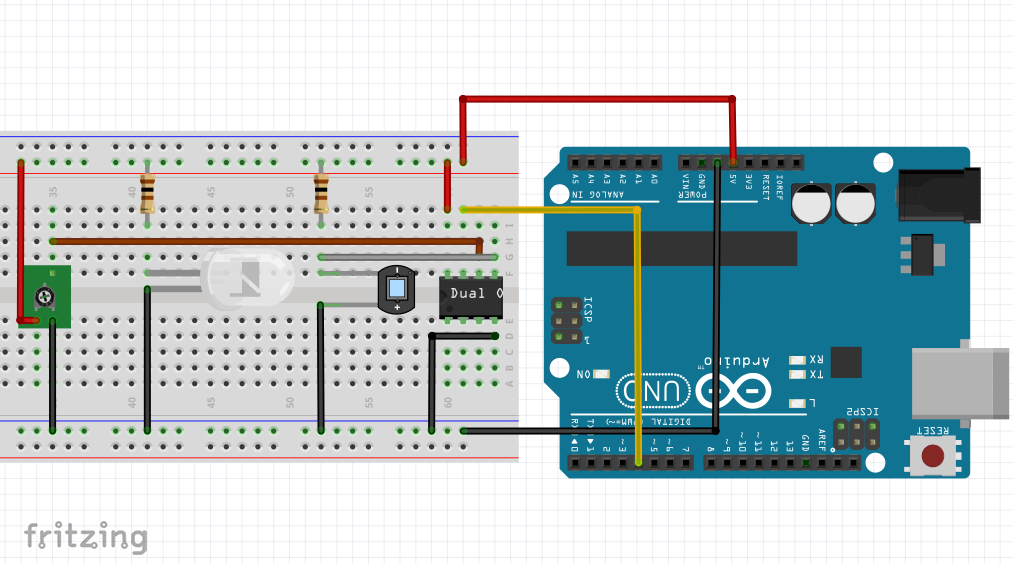 하드웨어 이미지
하드웨어 이미지 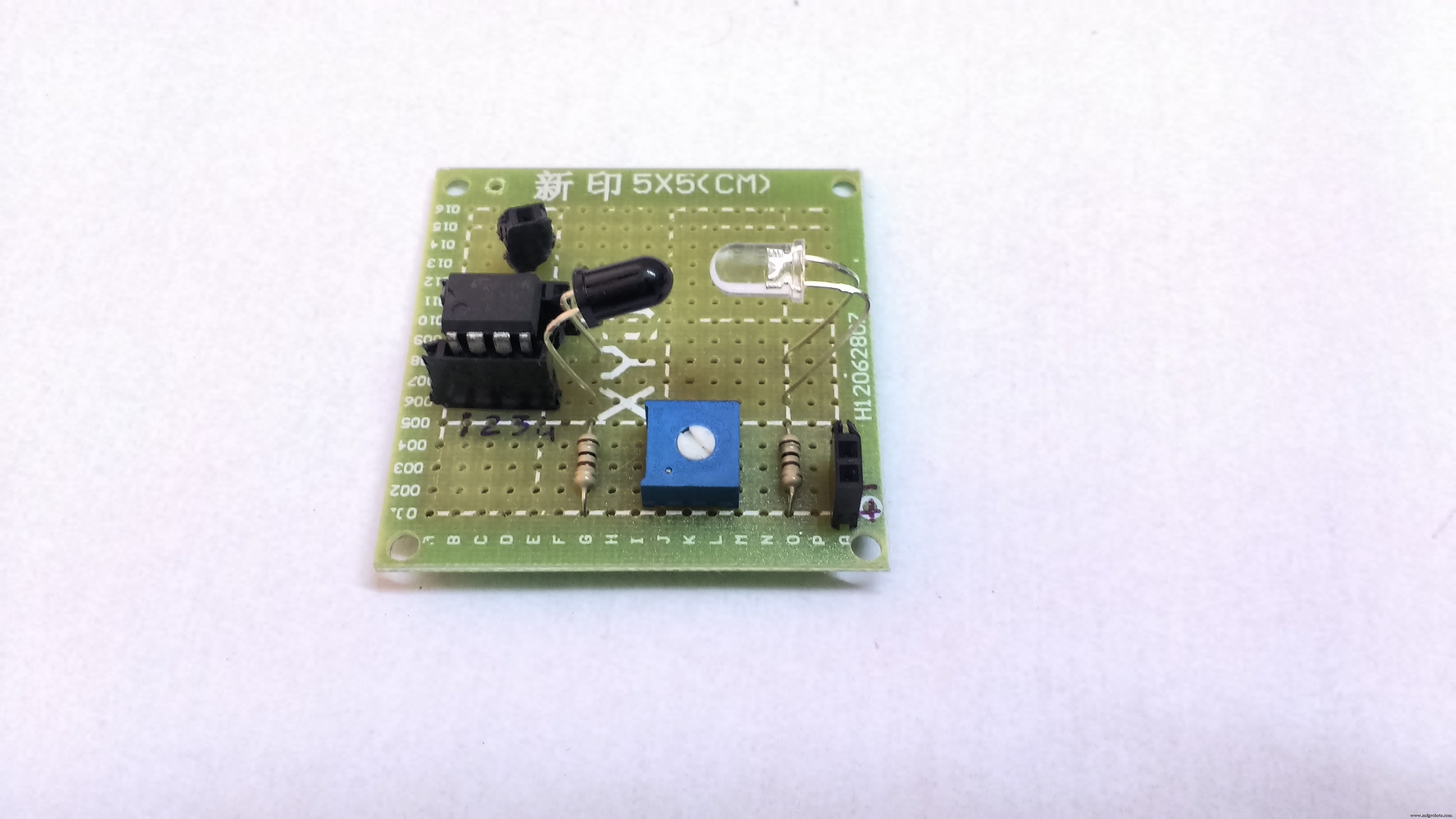 프리칭 회로도
프리칭 회로도 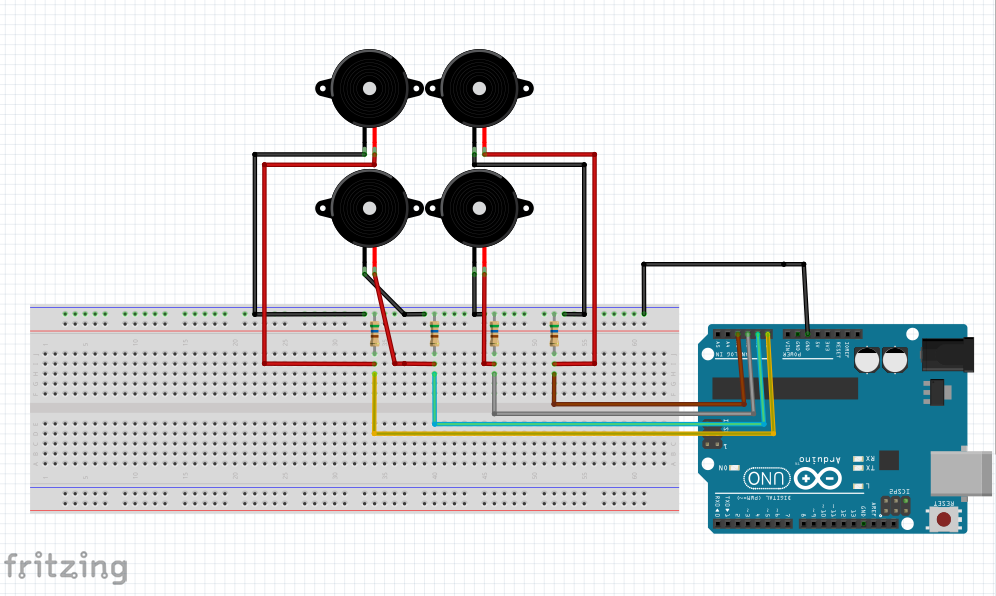 하드웨어 이미지
하드웨어 이미지 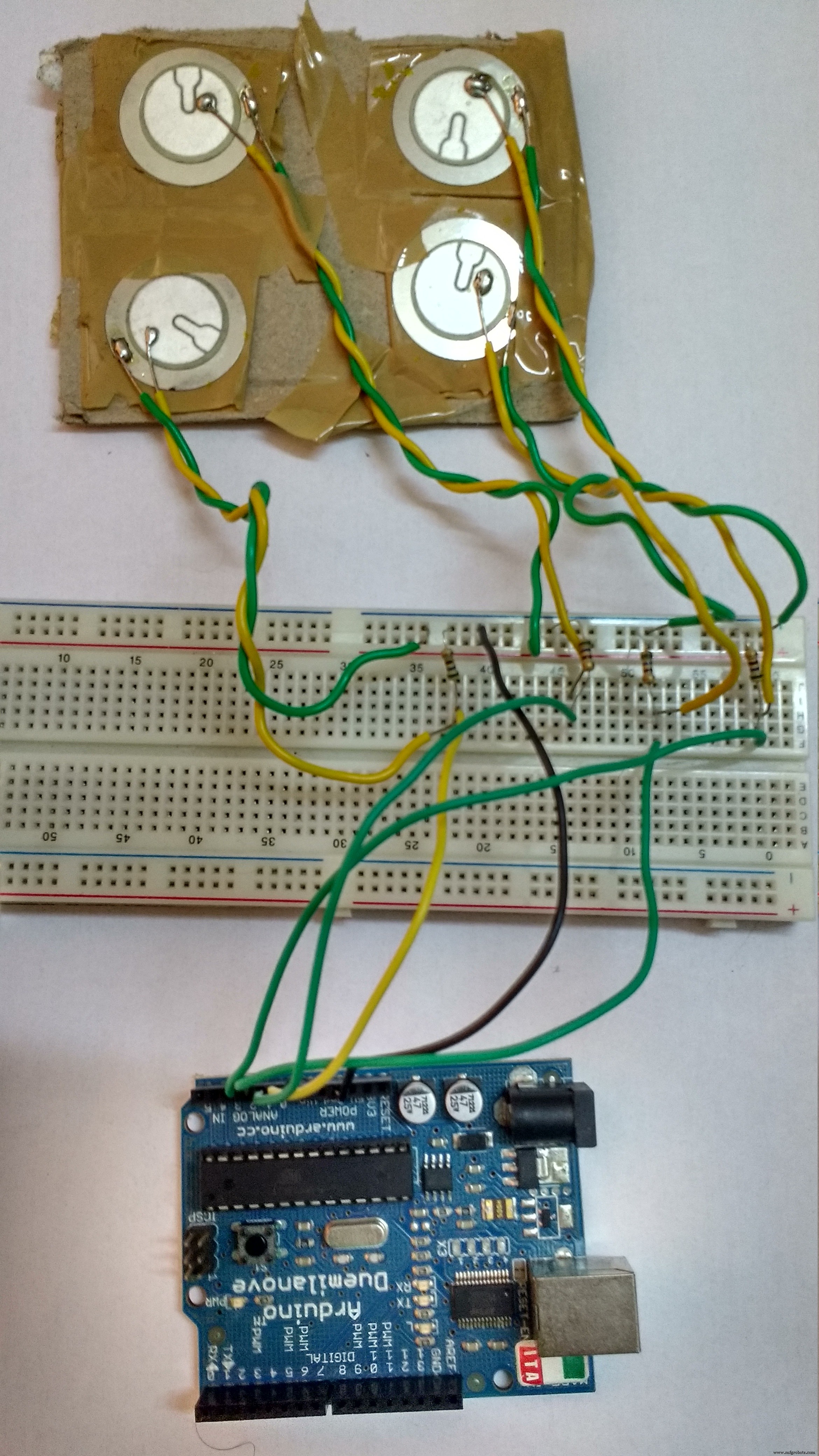
제조공정
디지털 멀티미터로 커패시턴스 측정 캐패시터의 캐패시턴스를 정확하게 측정하기 위해서는 인덕턴스(L), 캐패시턴스(C), 저항(R)을 정확하게 측정할 수 있는 LCR 미터와 같은 고가의 계측기가 필요합니다. 주파수와 같은 다양한 매개변수를 고려합니다. 디지털 멀티미터(DMM)도 정전 용량을 어느 정도 정밀하게 측정할 수 있지만 범위가 매우 낮습니다. 커패시턴스 커패시턴스는 전하의 형태로 에너지를 저장하는 커패시터의 능력입니다. 유전체 필름으로 분리된 두 개의 전도판 사이에 저장합니다. Farad 단위의 측정값입니다. 1패럿 커패시턴스
디지털 멀티미터로 주파수 측정 빈도는 1초 동안 완료된 주기의 수입니다. 주파수를 측정할 수 있는 다양한 종류의 멀티미터가 있습니다. 교류 및 기타 전기 신호는 장치의 작동에 영향을 미치는 주파수를 가지고 있습니다. 멀티미터를 사용하여 전압, 전류, 저항, 커패시턴스, 주파수 온도 및 연속성 등과 같은 여러 양을 측정하고 저항, 커패시터, 다이오드, 트랜지스터, 케이블 및 와이어 등과 같은 전기 및 전자 부품을 테스트할 수 있습니다. 이 기사에서는 멀티미터가 주파수를 측정하는 방법과 판독에 영향을 미치는 요소를 연구할 것입니다.