

제조공정

산업 제조
 |
| × | 1 | |||
| × | 8 | ||||
 |
| × | 1 |
 |
|
안녕하세요 여러분 오늘은 3D프린팅 없이도 개발이 가능한 오픈소스 로봇인 MIA-1 로봇을 만드는 과정을 보여드릴게요! 네, 알겠습니다. 이 로봇은 완전히 손으로 만들어졌습니다. 그리고 오픈소스 의미 - 코드와 모든 세부정보를 무료로 받을 수 있음 , 당신도 원한다면 이 로봇을 만들 수 있습니다.
여기에서는 그녀의 연설만 볼 수 있지만 그녀가 할 수 있는 일은 더 많습니다!
그녀가 할 수 있는 일은 다음과 같습니다.
<울>
보급품:
이 로봇을 만들기 위해 저는 지역 상점에서 구할 수 있는 모든 것을 사용했습니다.
마이크로컨트롤러 + 컴퓨터(The Brain):
<울>서보 모터:
MIA-1의 자유도는 13입니다.
<울>로봇 발톱을 추가했으며 다른 MG996r 서보 모터를 사용합니다.
점퍼 와이어 등
비전:
사진 촬영 및 얼굴 인식 등의 이미지 처리를 위해 USB 카메라를 사용했습니다. .
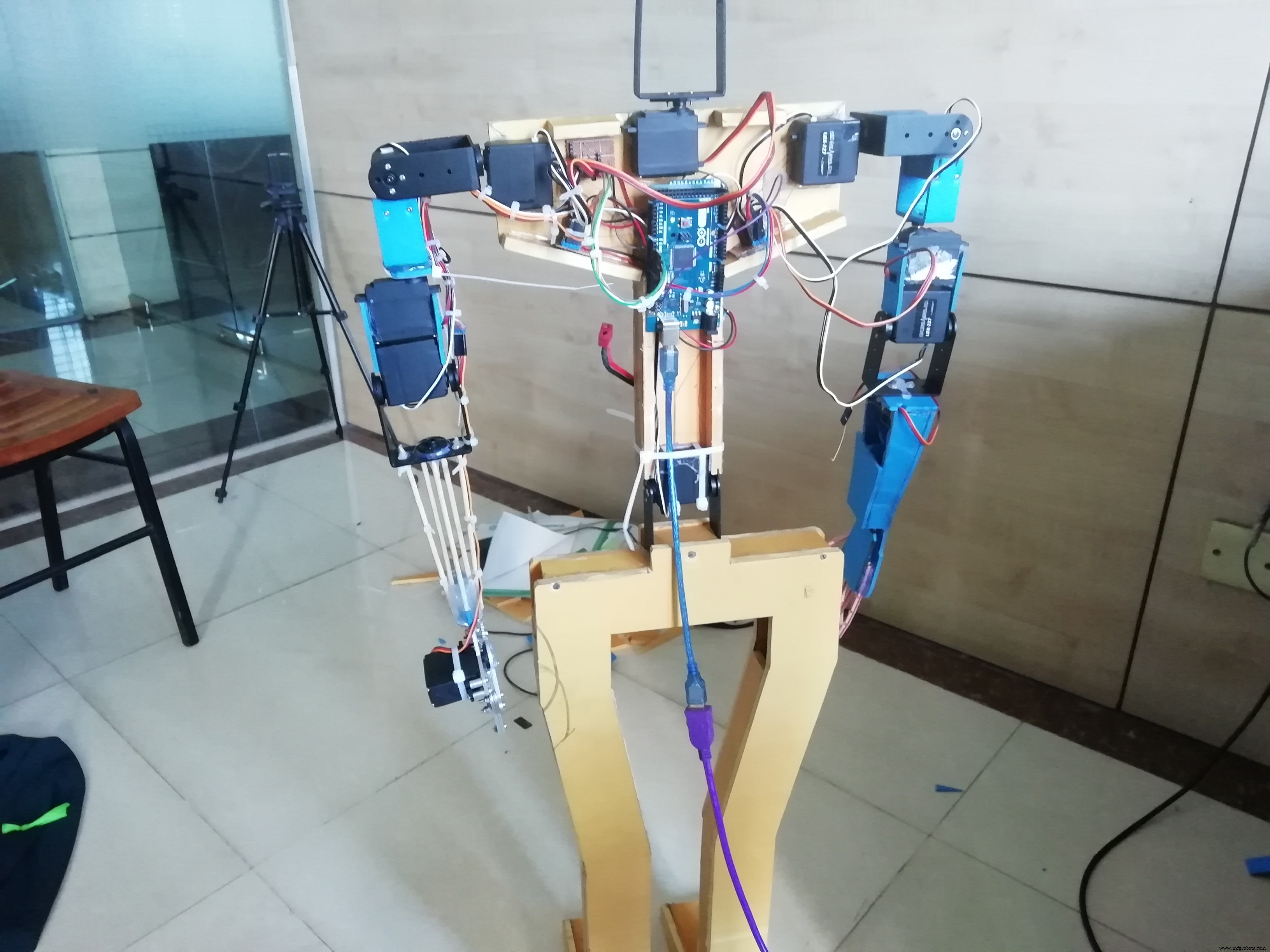
1단계:본체 및 모터 레이아웃
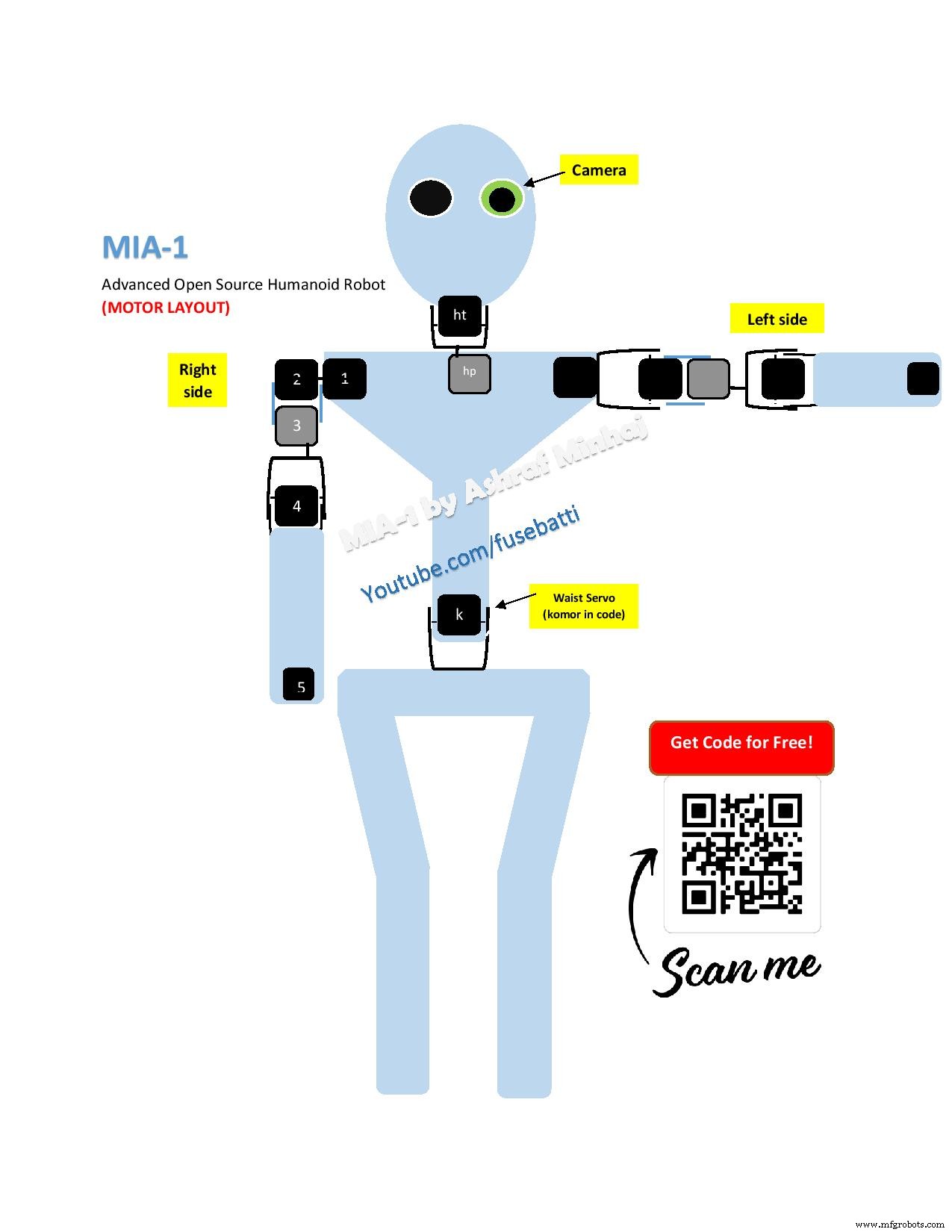

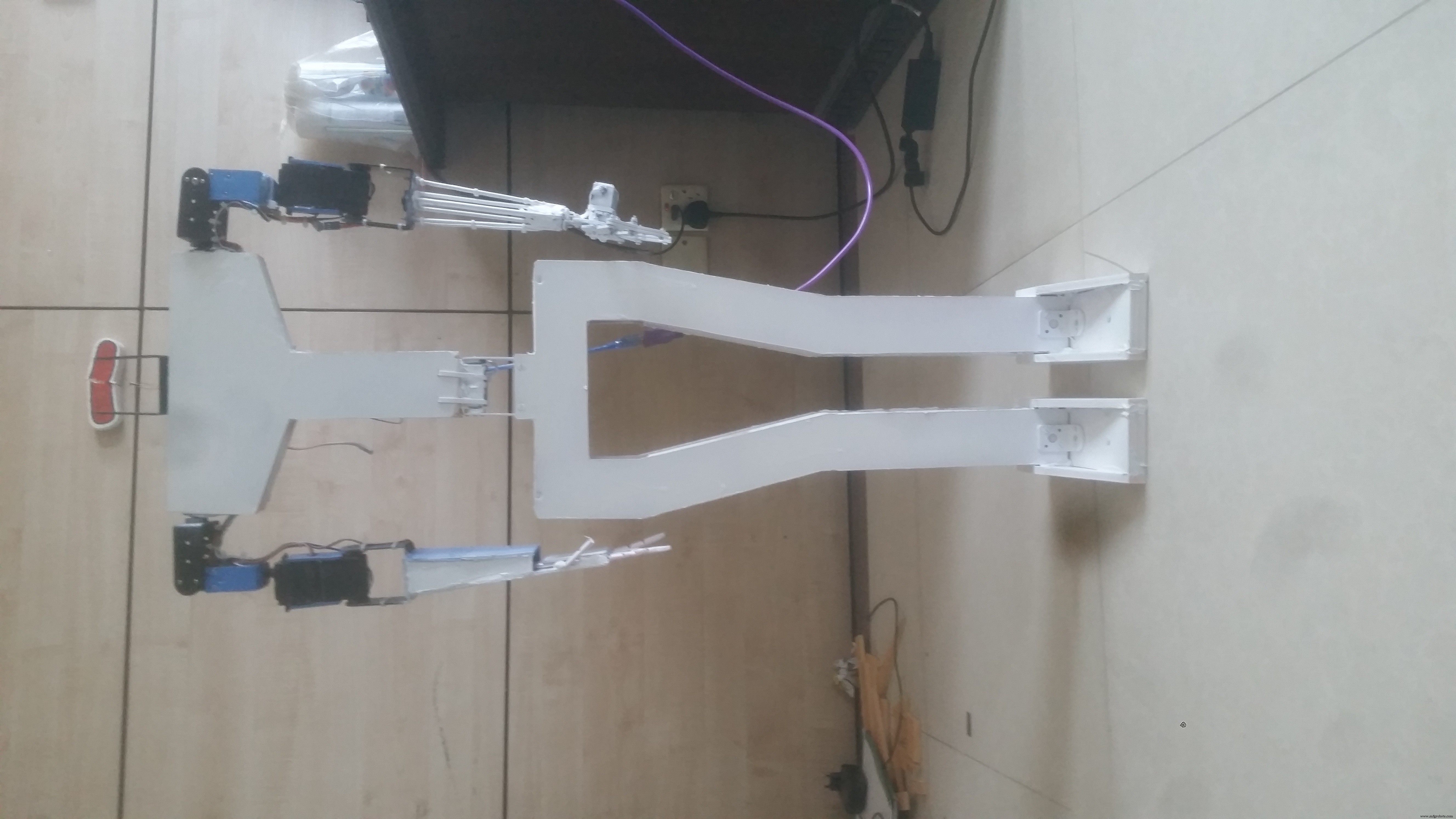
본체는 PVC 시트를 사용하여 제작되었으며, Hot Glue를 사용하여 다른 조각을 붙입니다. 및 나사 (그림 참조). PVC 시트를 커터칼로 잘랐습니다(조심하세요!! 손가락 베지 마세요!!). 그림 1과 2에서 서보 레이아웃을 볼 수 있습니다. 소녀 로봇을 만들면서 여성의 체형과 체형을 부여했습니다.
서보 커넥터는 잘 구부러지는 얇은 PVC 시트를 사용하여 만들어집니다.
머리는 풍선을 사용하여 만들고, 풍선에 공기를 불어넣고(그림 참조), 젖은 작은 종이 조각을 추가한 다음 말립니다. 8개의 레이어를 추가한 후 강력하고 지속 가능하게 되었습니다.
그런 다음 스프레이 색상을 사용하여 흰색(전신)으로 색칠합니다.
디자인이 너무 놀라울 정도로 균형이 잡혀 있고 그녀(MIA-1)가 그녀의 두 발로 바로 서 있다는 것이 밝혀졌습니다!!
디스플레이 추가:
그 후 나사와 뜨거운 접착제를 사용하여 LCD를 가슴에 장착했습니다(마지막 사진).
2단계:회로도
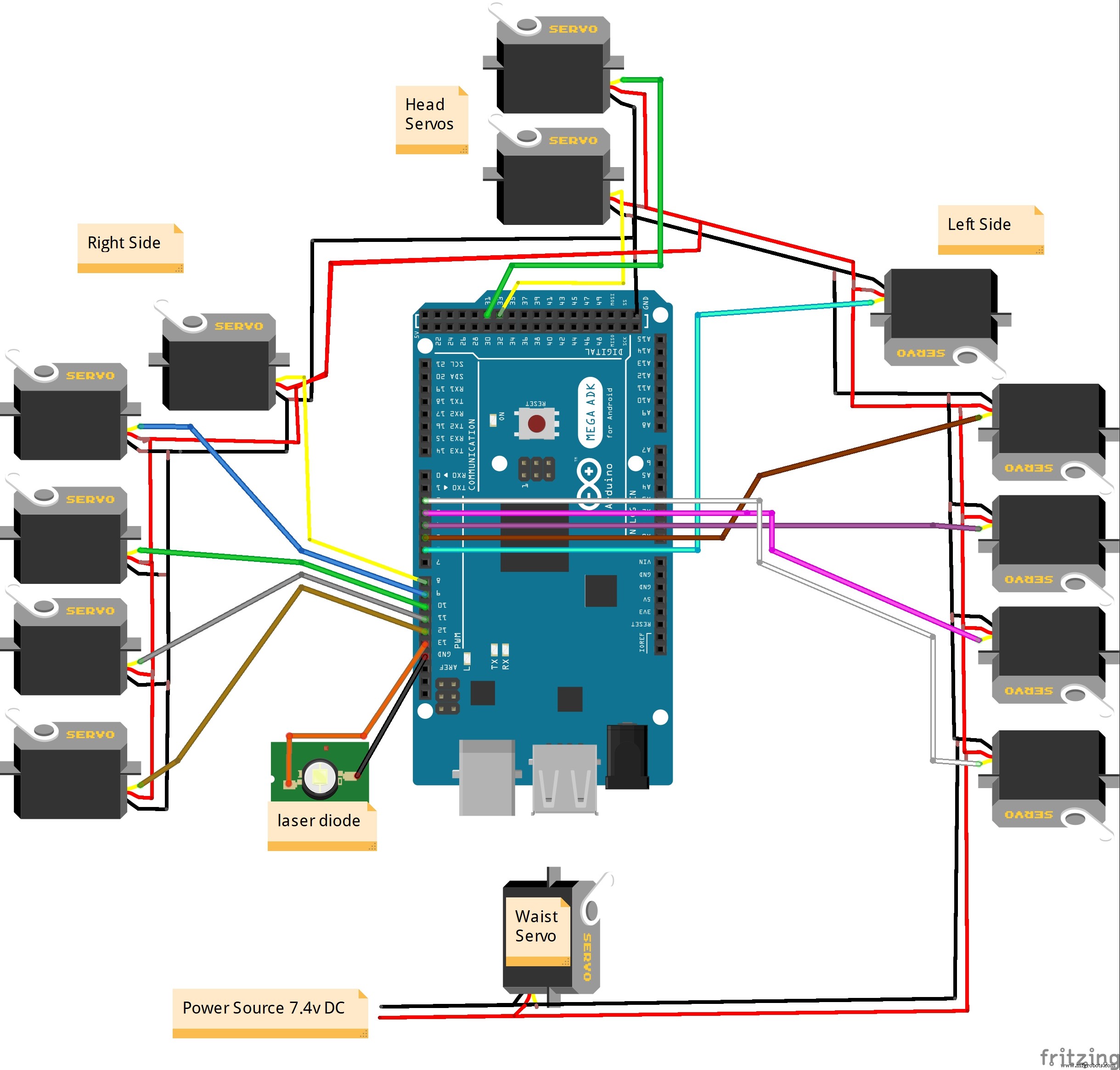
회로도는 복잡해 보이지만 그렇지 않습니다. 회로도를 본체에 모터 레이아웃으로 그려서 이해하기 쉽게 했습니다. 반드시 그라운드를 공유하십시오. arduino는 USB 케이블을 통해 컴퓨터에서 전원을 공급받습니다. mia가 arduino의 13번 핀(LED 핀)에서 전원을 공급받는 대상을 대상으로 하는 레이저 다이오드가 있습니다.
보시다시피 모든 모터와 아두이노 자체가 본체 뒷면에 있습니다. 나는 또한 뒤쪽에서 모든 케이블을 넣었습니다. 컴퓨터에 연결할 수 있도록 확장 USB 케이블을 구입했습니다.
3단계:코드
아시다시피 저는 arduino 메가를 사용했습니다. arduino mega는 서보 모터를 제어하고 모터는 미리 프로그래밍되어 있습니다. 여기에서 모터 코드를 가져옵니다. 로봇을 구축하는 동안 기본 서보 위치를 확인하십시오. 본체를 만들지 않고 arduino로 모터에 전원을 공급하기만 하면 서보 모터가 기본 위치에 도달합니다(아래 기본 위치).
/*기본/서보의 대기 위치*/
komor.write(4); #허리 서보
left1.write(120);
rFinger.write(0);
servo1.write(55);
clawOpen();
rightStandBy();
leftStandBy();
headTilt.write(134);
headPan.write(90); 모터 제어 코드는 750줄 이상입니다(편집 시 주의).
주요 처리는 python3 스크립트를 사용하여 수행됩니다.
Python에는 직렬을 통해 arduino와 통신하는 pySerial 라이브러리가 있습니다. 'COM PORT'에 유의하십시오.
#직렬 통신을 통해 mia 모터 드라이버 보드와 연결
시도:
mia =serial.Serial("COM28", 9600)
제외:
통과 또한 이러한 라이브러리를 pip 설치해야 합니다.
"""필수 라이브러리 가져오기"""
#요청 가져오기 #게시/요청 받기
pyttsx3 #오프라인 텍스트를 음성으로 가져오기
sr #Speech to로 speech_recognition 가져오기 텍스트(기능을 사용하려면 인터넷 필요)
시간 가져오기
임의 가져오기 randint #임의 정수 선택 라이브러리에서
tkinter #tkinter gui 라이브러리 가져오기
tkinter에서 가져오기 Tk, Button, Label, Tk #필요한 것 가져오기
USB를 통한 직렬 통신을 위한 직렬 #직렬 라이브러리 가져오기
PIL에서 가져오기 이미지 #fro 표시 이미지
가져오기 cv2 #Computer Vision 라이브러리
위키피디아 가져오기 #데이터 가져오기 위키피디아에서 직접 pip install을 사용하면 모든 것이 쉽습니다. opencv의 경우 명령 프롬프트에 입력:
pip install opencv-contrib-python 보고 있는 GUI(그래픽 사용자 인터페이스)는 tkinter를 사용하여 개발되었습니다. 이 라이브러리와 다른 모든 라이브러리의 경우 다음 명령으로 설치할 수 있습니다.
pip install library_name 그러면 설치됩니다.
또한 웹캠을 사용하는 경우 캠이 1로 표시될 가능성이 더 높은지 살펴보세요.
cap =cv2.VideoCapture(1) #카메라 그리고 이 로봇이 실제로 어떻게 대답하는지 자세히 알고 싶다면 이 튜토리얼을 읽어보세요.
MIA-1의 코드는 이것의 확장 버전일 뿐입니다.
arduino에 명령을 내리는 시점에서 컴퓨터는 물기를 보내고 arduino는 받은 물기에 따라 조치를 취하므로 미아의 움직임과 대화가 비동기적으로 보입니다.
mia.write(b'p') # 위 아래로 향하는 명령
count_down(3)
respond("Smile please", 100) 이제 코드를 받으려면 아래 링크로 이동하십시오.
여기에서 MIA-1의 코드를 다운로드하십시오.
4단계:전원 및 마무리
7.4v 리포 배터리를 사용하여 로봇에 전원을 공급했습니다. LDX227 서보는 전력을 많이 소모하므로(그러나 품질은 우수함) 항상 최소 7.3v를 확보해야 합니다. 반면에 MG996r 서보 모터는 저렴하므로 쉽게 손상될 수 있으므로 7.8V 이상 나오지 않도록 하십시오. 따라서 이 로봇의 최고 전원 공급 장치는 7.4V에서 7.8V 사이여야 합니다.
행복한 만들기! 이 로봇이 마음에 드시면 채널을 구독하여 더 멋진 프로젝트를 지원하세요.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">제조공정
수제 제품을 자동화할 수 있나요? 수제 제품을 생각할 때 우리는 종종 각 조각이 반드시 고유해야 하는 매우 복잡한 맞춤형 제품을 상상합니다. 그러나 많은 제품이 완전 자동화를 사용하는 것을 보증할 만큼 생산량이 많지 않기 때문에 수작업으로 제작됩니다. 이 사례 연구에서는 산업용 플라스틱 연구 그룹이 로봇과 RoboDK를 사용하여 소량 생산 공정을 자동화하는 방법을 보여줍니다. 많은 자동화 형태의 문제는 높은 처리량으로 일관된 프로세스를 실행해야 한다는 것입니다. 이것이 없으면 투자 수익을 달성할 수 있을지 확신할 수 없
로봇은 지칠 줄 모르고 일하며 24시간 내내 완벽하고 정확한 결과를 내야 합니다. 그러나 무엇이 그들에게 힘을 줍니까? 그들은 음식과 물이 필요하지 않습니다. 그들은 전원이 필요합니다. 로봇 전원의 선택은 전체 시스템에 영향을 미치므로 설계 초기 단계에서 결정해야 합니다. 로봇의 주요 전력원은 배터리입니다. 로봇에 사용되는 배터리의 종류는 안전성, 수명, 중량에 따라 다양하다. 은 카드뮴 배터리와 마찬가지로 납산 배터리가 일반적입니다. 충전식 배터리와 기본 배터리가 모두 사용됩니다. 충전식이 아닌 배터리는 일반적으로 더 강력합니다