

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 |
초보자는 다음을 배울 수 있습니다.
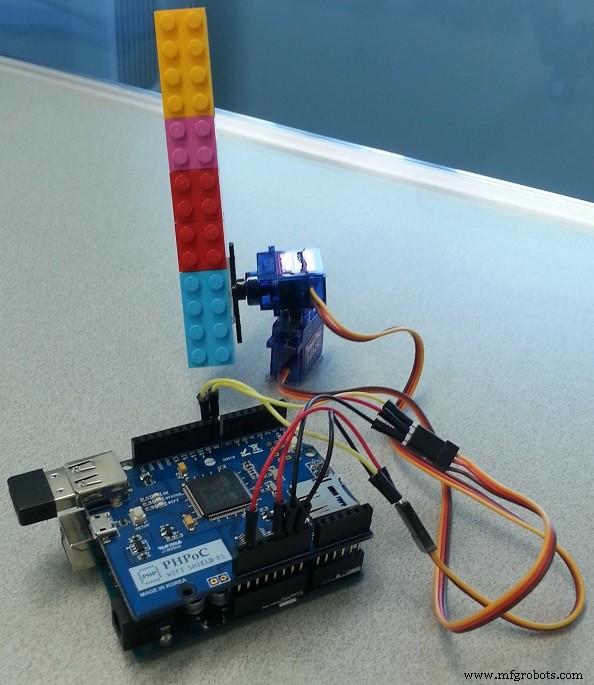
<울>이 프로젝트로 모든 것을 제어할 수 있지만 저는 서보 모터를 예로 들었습니다.
데모
배선 <울>
데이터 흐름
웹 브라우저 ---> PHPoC WiFi 쉴드 ---> Arduino
웹 브라우저의 웹 앱은 WebSocket을 통해 터치 또는 클릭 이벤트의 좌표(스케일링 후)를 PHPoC 쉴드로 보냅니다. PHPoC 쉴드는 데이터를 수신하면 자동으로 아두이노에 전달합니다. 아두이노는 PHPoC Shield로부터 받은 데이터에 따라 2개의 서보 모터를 제어합니다.
참고: PHPoC 실드에는 웹 브라우저에서 Arduino로 데이터를 전달하는 프로그램이 내장되어 있습니다. 따라서 신경 쓸 필요가 없습니다.
우리가 해야 할 일 <울>
PHPoC Shield용 Wi-Fi 정보 설정
이 지침을 참조하십시오.
새로운 웹 UI를 PHPoC Shield에 업로드
<울>Arduino 코드 작성
<울>
사용해 보세요 <울>
http://를 입력합니다. replace_ip_address /remote_joystick.php
유사한 프로젝트이지만 다른 하드웨어 플랫폼
이 프로젝트는 동일한 작업을 수행하지만 다른 하드웨어 플랫폼을 사용했습니다.
초보자를 위한 최고의 Arduino 스타터 키트
초보자를 위한 최고의 Arduino 키트 보기
함수 참조 <울>
#include "SPI.h#include "Phpoc.h#includePhpocServer 서버(80);서보 서보_x;서보 서보_y; 무효 설정() { Serial.begin(9600); 동안(! 직렬); Phpoc.begin(PF_LOG_SPI | PF_LOG_NET); //Phpoc.begin(); server.beginWebSocket("웹_조이스틱"); Serial.print("웹소켓 서버 주소 :"); Serial.println(Phpoc.localIP()); 서보_x.attach(8); // 8번 핀의 서보를 서보 객체에 연결합니다. servo_y.attach(9); // 9번 핀의 서보를 서보 객체에 연결합니다. servo_x.write(90); 서보_y.write(90); }void loop() { // 새 클라이언트를 기다립니다. PhpocClient client =server.available(); if (클라이언트) { 문자열 데이터 =client.readLine(); if(데이터){ 정수 위치 =data.indexOf(':'); 긴 x =data.substring(0, pos).toInt(); 긴 y =data.substring(pos+1).toInt(); Serial.print("x:"); Serial.print(x); Serial.print(", y:"); Serial.println(y); // [-100; 100] ~ [0; 180] 장각_x =(x + 100) * 180 /200; 장각_y =(y + 100) * 180 /200; 서보_x.쓰기(각도_x); 서보_y.write(각도_y); } }}
Arduino - PHPoC Shield
Arduino - 웹 기반 조이스틱
웹소켓:null
제조공정
구성품 및 소모품 Arduino UNO × 1 Arduino용 PHPoC WiFi 실드 × 1 버튼 × 4 브레드보드(일반) × 1 저항 10k 옴 × 1 열수축 튜브 × 1 이 프로젝트 정보 초보자라면 아두이노 - 버튼 튜토리얼에서 버튼에 대해 배울 수 있습니다. 여기에서 더 간단한 하드웨어(PHPoC만 해당)를 사용하여 비슷한 프로젝트를 만들었습니다. 데모 데이터 흐름 웹 브라
조이스틱 모듈 현재 모션 및 로봇과 관련된 프로젝트를 처리하고 있습니까? 그렇다면 Arduino Joystick 모듈에 대해 들어보았지만 만드는 방법을 모를 가능성이 있습니다. 아니면 Arduino 조이스틱 모듈의 작동 방식에 대한 자세한 정보를 얻고 싶습니까? 그렇다면 올바른 위치에 있습니다. Arduino Joystick의 목표는 Arduino에 모션을 전달하는 것입니다. 그리고 2D(2축)에서 이 작업을 수행하므로 모션 및 로봇 공학 애플리케이션에 적합합니다. 따라서 이 기사에서는 Arduino 조이스틱 모듈, 작