

제조공정

산업 제조
 |
| × | 2 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 |
 |
| |||
 |
|
 |
|
https://drive.google.com/open?id=1RNI2eaknWPN0lPpKm8wv95DUVcTr8H6

•인도의 농촌과 도시 모두에서 장애인 비율이 증가했습니다. 장애는 출생에 의해 또는 어떤 의학적 또는 우발적인 이유로 인해 발생할 수 있습니다.
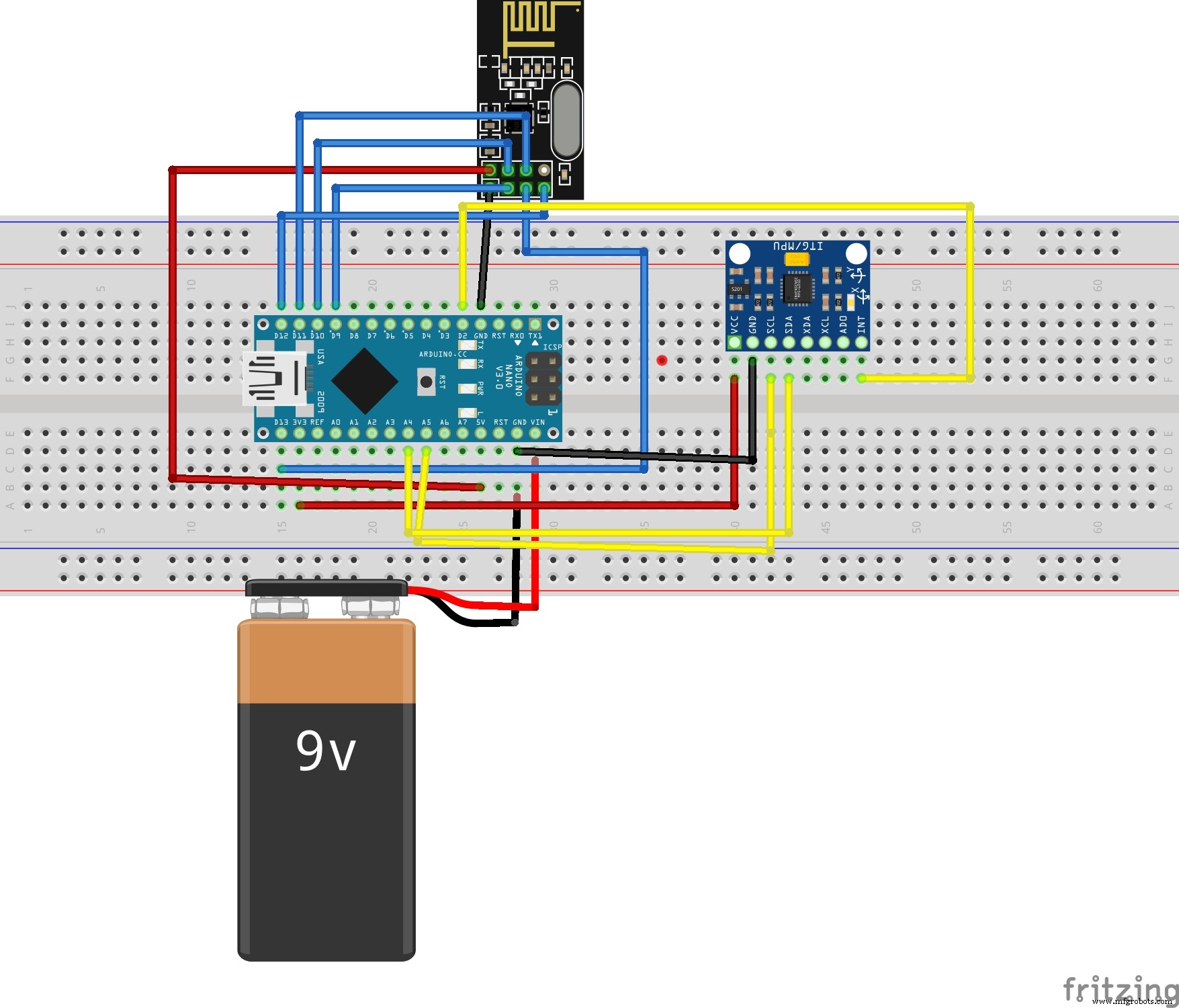
•이 프로젝트의 목표는 손 제스처로 제어되는 휠체어를 만들고 가속도계를 센서로 사용하여 신체 장애인이 손의 지시를 받음으로써 한 장소에서 다른 장소로 이동할 수 있도록 돕는 것입니다.
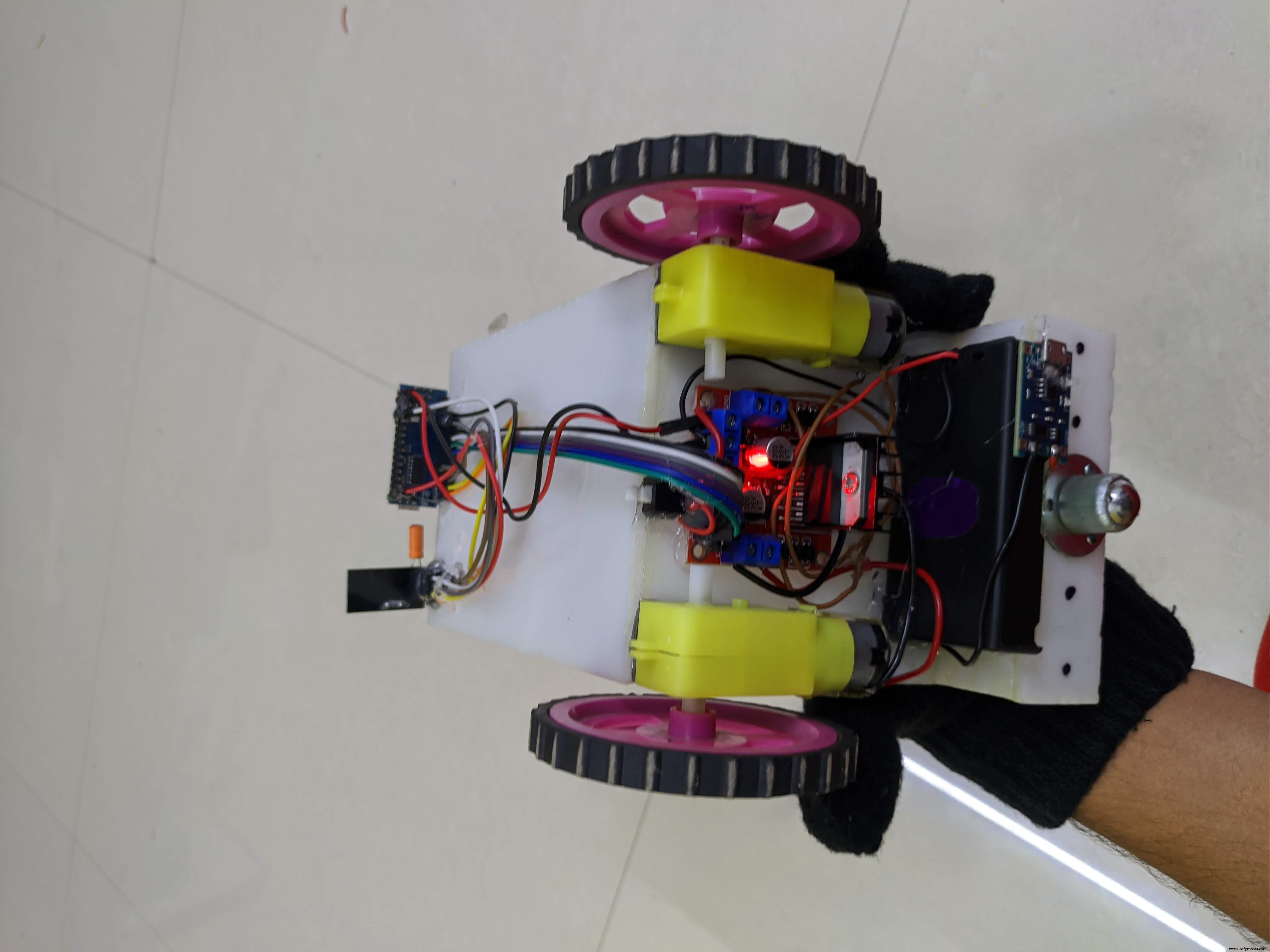
•오늘날 인도에서는 많은 사람들이 장애로 고통받고 있으며, 하반신이 마비된 사람들이 있습니다. 이 휠체어는 편안함을 더하고 사람들의 삶을 조금 더 쉽게 만들어 줄 것입니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">#include//nRF24L01+#include "RF24.h"와 통신하기 위한 SPI 라이브러리 //nRF24L01+#include "Wire.h"의 메인 라이브러리 //통신용#include "I2Cdev. h" //MPU6050과의 통신용#include "MPU6050.h" //MPU6050MPU6050의 메인 라이브러리 mpu;int16_t ax, ay, az;int16_t gx, gy, gz;int data[2];RF24 radio(9, 10); const uint64_t 파이프 =0xE8E8F0F0E1LL; 무효 설정(무효){ Serial.begin(9600); Wire.begin(); mpu.initialize(); //MPU 객체 초기화 radio.begin(); //nRF24 통신 시작 radio.openWritingPipe(pipe); //프로그램이 데이터를 보낼 수신자의 주소를 설정합니다.}void loop(void){ mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); 데이터[0] =map(ax, -17000, 17000, 300, 400); //X축 데이터 보내기 data[1] =map(ay, -17000, 17000, 100, 200); //Y축 데이터 보내기 radio.write(data, sizeof(data));}
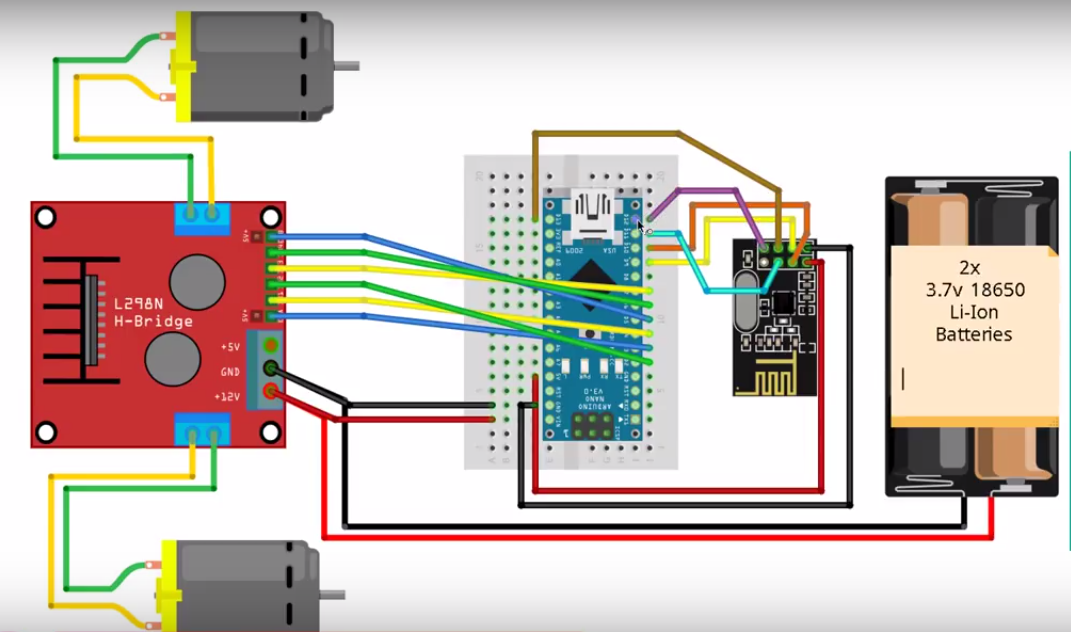
#include#include #include #include #include //nRF24L01+#include와 통신을 위한 SPI 라이브러리 " RF24.h" //nRF24L01의 메인 라이브러리+const int enbA =3;const int enbB =5;const int IN1 =2; //오른쪽 모터 (-) const int IN2 =4; //오른쪽 모터 (+) const int IN3 =7; //왼쪽 모터 (+) const int IN4 =6; //오른쪽 모터(-)int RightSpd =130;int LeftSpd =130;int data[2];RF24 radio(9,10);const uint64_t pipe =0xE8E8F0F0E1LL;void setup(){ //모터 핀을 OUTPUT으로 정의 핀모드(enbA, 출력); 핀모드(enbB, 출력); 핀모드(IN1, 출력); 핀모드(IN2, 출력); 핀모드(IN3, 출력); 핀모드(IN4, 출력); Serial.begin(9600); radio.begin(); radio.openReadingPipe(1, 파이프); radio.startListening(); } 무효 루프(){ if (radio.available()){ radio.read(data, sizeof(data)); if(data[0]> 380){ // 앞으로 analogWrite(enbA, RightSpd); analogWrite(enbB, LeftSpd); 디지털 쓰기(IN1, HIGH); 디지털 쓰기(IN2, LOW); 디지털 쓰기(IN3, HIGH); 디지털 쓰기(IN4, LOW); } if(data[0] <310){ //역방향 analogWrite(enbA, RightSpd); analogWrite(enbB, LeftSpd); 디지털 쓰기(IN1, LOW); 디지털 쓰기(IN2, HIGH); 디지털 쓰기(IN3, LOW); 디지털 쓰기(IN4, 높음); } if(data[1]> 180){ //왼쪽 analogWrite(enbA, RightSpd); analogWrite(enbB, LeftSpd); 디지털 쓰기(IN1, HIGH); 디지털 쓰기(IN2, LOW); 디지털 쓰기(IN3, LOW); 디지털 쓰기(IN4, 높음); } if(data[1] <110){ //오른쪽 analogWrite(enbA, RightSpd); analogWrite(enbB, LeftSpd); 디지털 쓰기(IN1, LOW); 디지털 쓰기(IN2, HIGH); 디지털 쓰기(IN3, HIGH); 디지털 쓰기(IN4, LOW); } if(data[0]> 330 &&data[0] <360 &&data[1]> 130 &&data[1] <160){ //자동차 정지 analogWrite(enbA, 0); analogWrite(enbB, 0); } }}
제조공정
이 튜토리얼에서는 Arduino와 ESC를 사용하여 브러시리스 모터를 제어하는 방법을 배웁니다. BLDC 모터가 어떻게 작동하는지 더 자세히 알고 싶다면 다른 기사를 확인하거나 브러시리스 모터의 작동 원리와 Arduino 및 ESC를 사용하여 모터를 제어하는 방법에 대한 설명이 포함된 다음 동영상을 시청하세요. 개요 이 예에서는 다음 사양의 outrunner BLDC 모터가 있습니다. KV 등급이 1000이고 2S, 3S 또는 4S LiPo 배터리를 사용하여 전원을 공급할 수 있으며 30A ESC가 필요합니다. 브러시리스
제조업체는 여러 이점을 제공하기 때문에 CNC 가공을 선택합니다. CNC 머시닝은 기존 머시닝보다 높은 생산성과 적은 오류를 보장할 수 있지만 품질 검사는 여전히 제조 공정에서 없어서는 안될 부분입니다. 품질 관리 및 검사는 가공의 모든 단계에서 수행됩니다. 또한 품질 보증은 품질 관리와 다른 중요한 측면입니다. 품질보증이란 조직과 권한을 부여받은 기관이 정한 품질검사의 과정을 말한다. 여기에는 관련 문서도 포함됩니다. 따라서 품질 보증은 프로세스와 문서의 수립이며 품질 관리는 정기적으로 또는 필요에 따라 구현됩니다. 품질 관리는